武汉大学GREAT团队因子图优化定位开源代码RTK测试(下)
上一篇介绍了精密定位模块GREAT-PVT,并以它自带的例子进行了RTK解算。经过使用,我们了解了GREAT的主要功能类似POSMV的后处理软件POSPAC MMS,如果手头上没有联合解算定位和姿态的软件,可以尝试使用这款软件。上一篇还简单将GREAT-PVT的RTK解算结果与RTKLIB2.5进行了比较,轨迹基本上是重合的。
那么,如果使用武汉大学另一款软件PRIDE-PPPAR直接解算流动的结果呢?
先使用之前安装的2023年8月版本,报错了,应该是解算需要的辅助文件下载地址变了。
下载最新版本,重新在msys2上编译安装,几分钟就安装上了。用它自带的测试程序检验一下安装是否成功,解算过程耗时约30分钟。
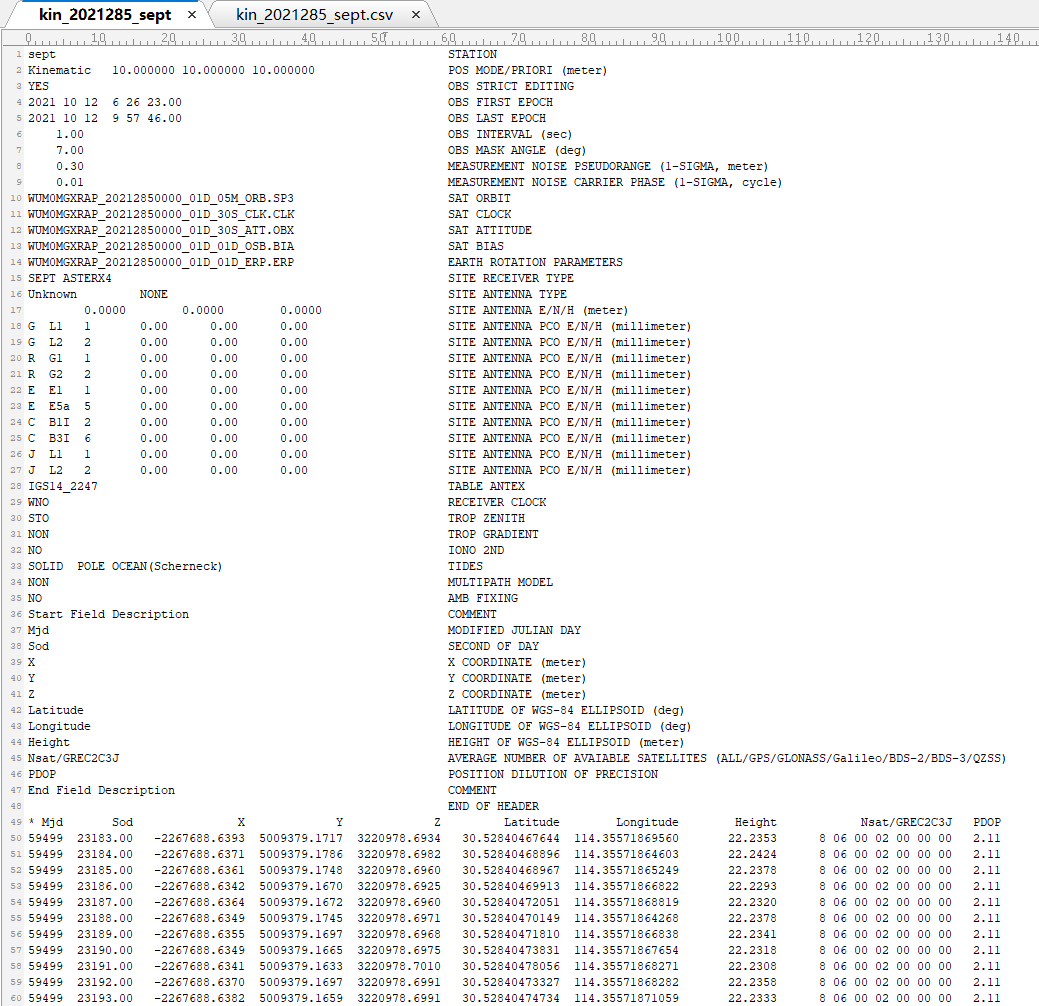
使用PRIDE解算GREAT-PVT的流动数据命令为:
pdp3 SEPT2850.21O
大约10分钟解算完成。解算结果在kin_2021285_sept中。
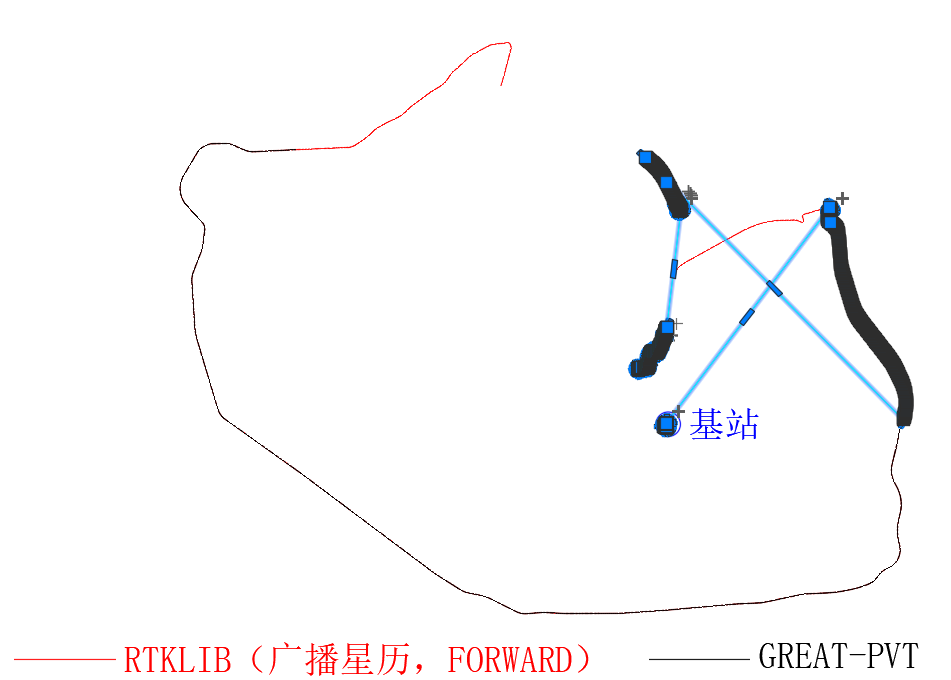
将PRIDE解算结果展布在上文图形中,见下图,图中选中的线段是PRIDE解算结果,从图中可以看出,只有中间一段定位轨迹与RTKLIB2.5重合。
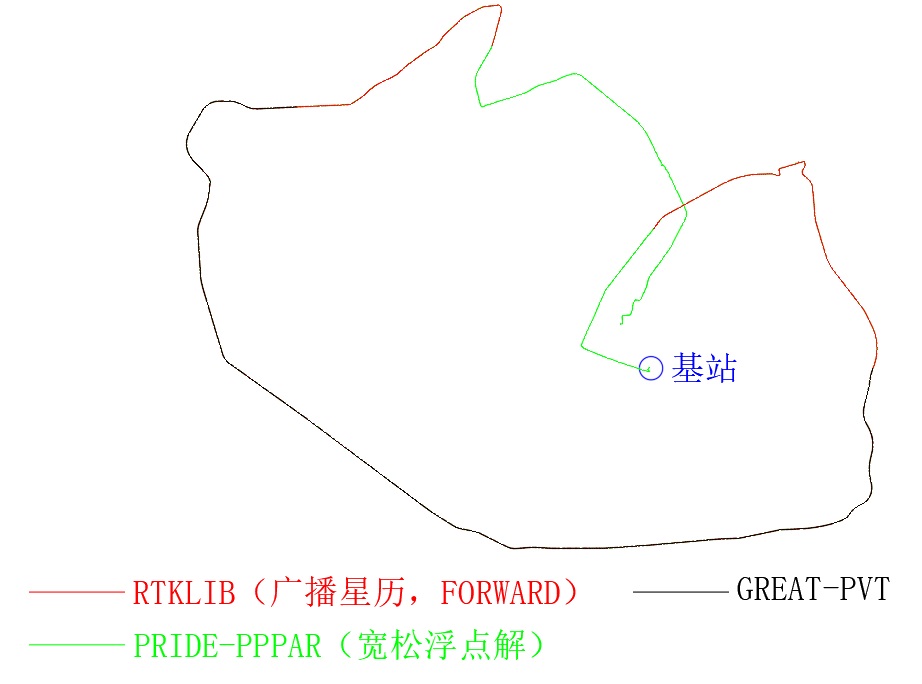
重新运算,宽松浮点解
pdp3 -f -l SEPT2850.21O
解算时间大约20分钟,将解算的结果落在图中,见下图,从图中可以看出,PRIDE宽松浮点解的轨迹最完整,与GREAT和RTKLIB解算的轨迹基本重合。
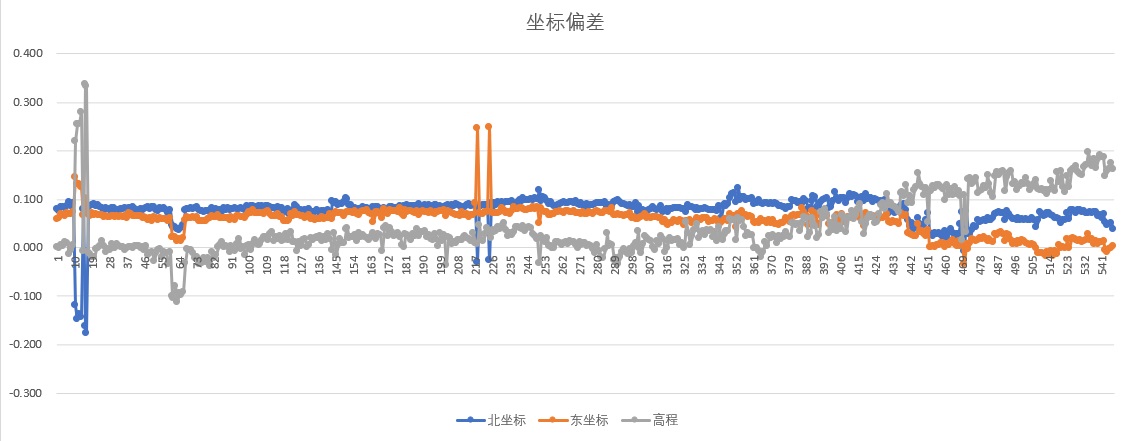
由于GREAT解算过程剔除了一些点,而PRIDE解算没有剔除,所以我们选取了一段同名点,来比较它们的坐标偏差,见下图。从图中可以看出,坐标分量偏差绝大部分小于0.2m。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 2
2 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)