6轴机器人运动学逆解:Matlab详细解算过程、推导与验算
6轴机器人运动学逆解 matlab详细解算过程 推导过程 验算过程
逆解这玩意儿就像给机器人做反向导航——已知终点坐标,反推每个关节该转多少度。传统方法不是几何法就是代数法,今天咱们玩点实在的,用Matlab符号计算暴力拆解六轴串联机械臂的逆解。
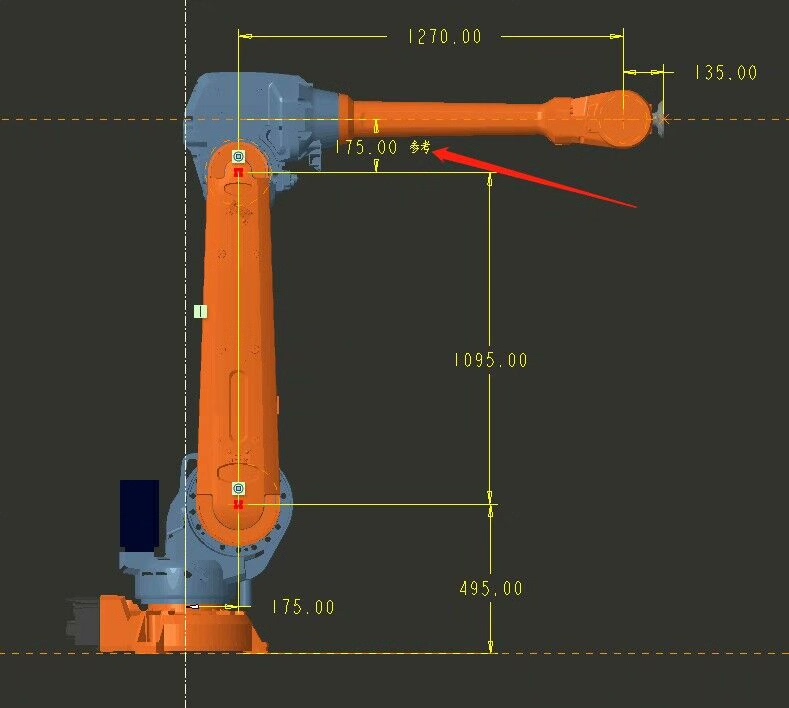
先搬出DH参数表镇场子。假设已经测出六个关节的α、a、d值(别问我怎么测的,这得找厂商要参数),在Matlab里先定义符号变量:
syms q1 q2 q3 q4 q5 q6 real
syms nx ny nz ox oy oz ax ay az px py pz real接下来构建齐次变换矩阵。举个例子,第一个关节的变换矩阵长这样:
T1 = [cos(q1) -sin(q1)*cos(alpha1) sin(q1)*sin(alpha1) a1*cos(q1);
sin(q1) cos(q1)*cos(alpha1) -cos(q1)*sin(alpha1) a1*sin(q1);
0 sin(alpha1) cos(alpha1) d1;
0 0 0 1];六个矩阵连乘得到总变换矩阵T_total。这时候会出现一个有意思的现象——等式两边同时左乘T1的逆矩阵,可以把q1孤立出来:
eqn = T1_inv * T_total == T2*T3*T4*T5*T6;盯着等式右下角位置的元素,会发现类似这种结构:k1sin(q1) + k2cos(q1) = k3。这时候祭出三角恒等式:
solve(k1*sin(q) + k2*cos(q) == k3, q)解出来的q1可能有两个解,对应机械臂的肘部上/下两种构型。重复这个套路处理后续关节时,会遇到更复杂的代数方程。这时候Matlab的solve函数可能开始装死,得手动提取方程中的sin/cos项进行变量替换:
% 遇到形如A*cos(q2) + B*sin(q2) = C的情况
eq = A*cos(q2) + B*sin(q2) - C;
[eq_simplified, ~] = subs(eq, [cos(q2),sin(q2)], [(1-t^2)/(1+t^2), 2*t/(1+t^2)])这时候方程就变成了关于t的多项式方程,用roots函数找出实根。每个实根对应一个可能的q2角度,记得用atan2确定象限。
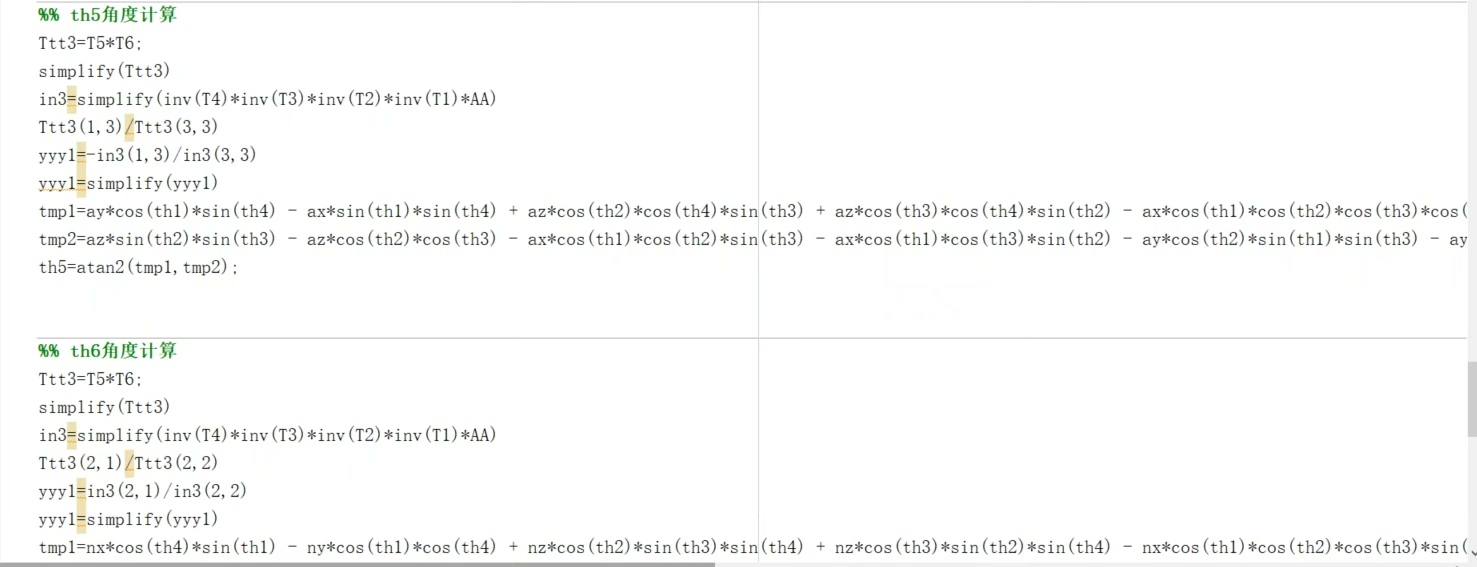
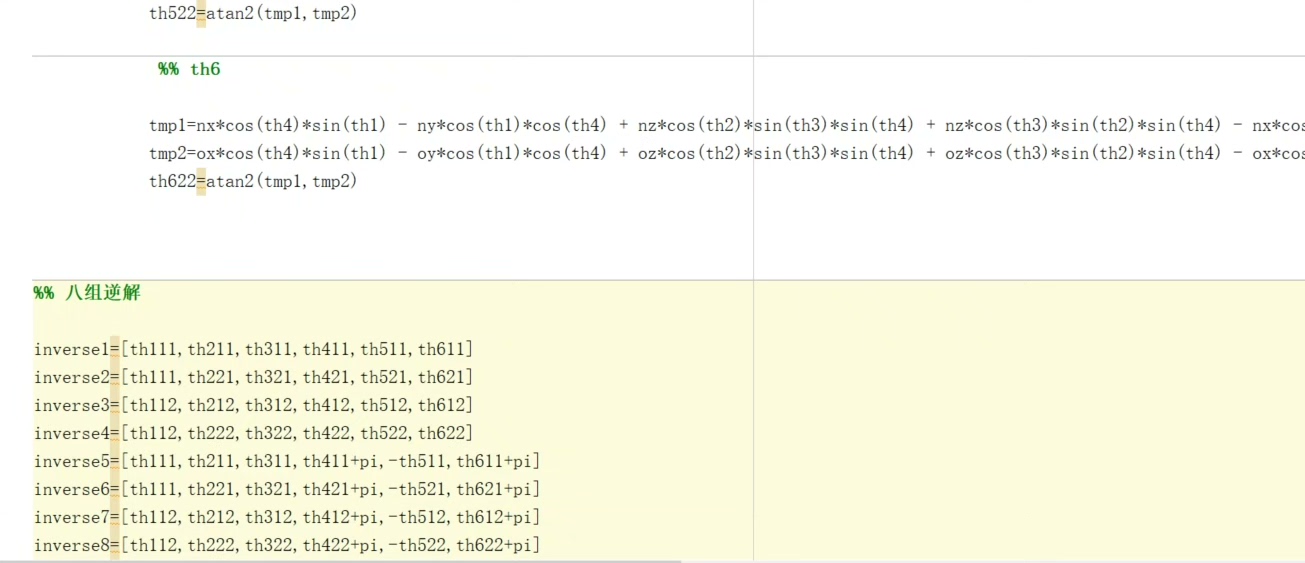
验算环节才是重头戏。随机生成一组关节角qoriginal,正向运动学算出末端位姿Tgoal。把T_goal喂给逆解算法,得到8组可能解:
q_solutions = inverse_kinematics(T_goal);
for i = 1:8
T_check = forward_kinematics(q_solutions(i,:));
error(i) = norm(T_check(1:3,4)-T_goal(1:3,4));
end
disp('位置误差(mm):'), disp(error*1000)正常情况下至少有一组解的误差在0.1mm级别。如果出现厘米级误差,八成是哪个关节的pi符号处理漏了,检查下解的角度是否加了2pi或取补角。
最后给个实战建议:别在符号运算阶段展开全部矩阵,会算到Matlab卡死。重点盯着位置向量的z分量和旋转矩阵的第三列,这些往往包含最简形式的关节角组合。记住,解逆解就像拆俄罗斯套娃,解出一个关节就把它代入下一个方程,直到所有关节都被扒光——呃,是被解算出来。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)