Linux系统下海康机器人MVS安装
·
一、安装
在海康机器人官网,服务支持-软件下载中间中,下载相应的客户端安装包。

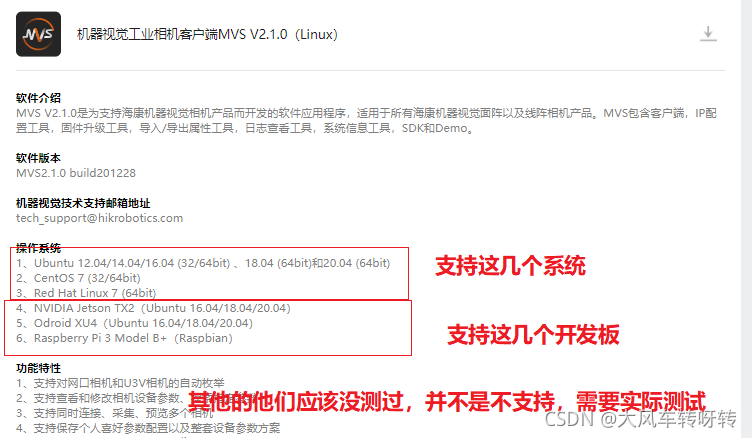
安装包里有各个系统及arm开发板使用的安装包,选择相应的安装包进行安装,要是不知道自己需要安装哪个安装包,就敲uname -a去确认,下面有列出来相应的系统以及针对的安装包。
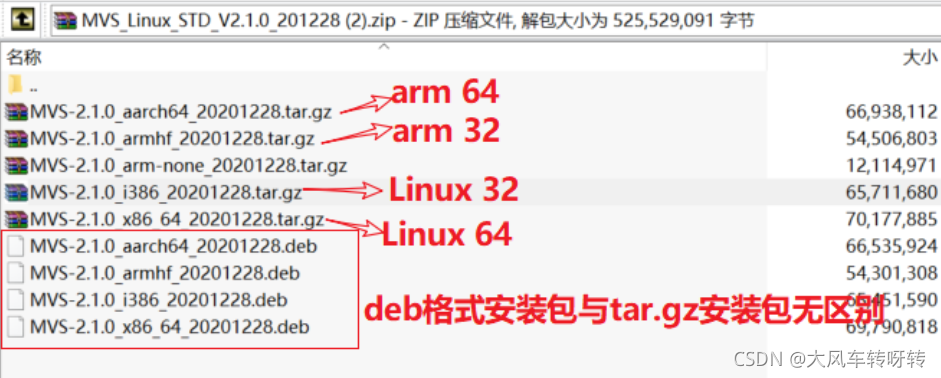
| 系统版本 | 安装包 |
|---|---|
 |
Linux 64 |
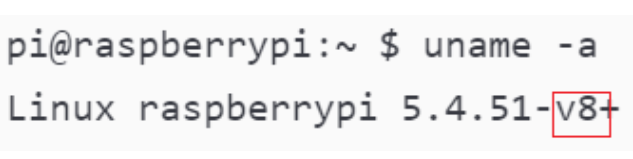 |
arm 64 |
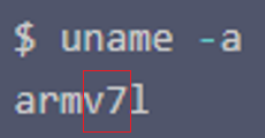 |
arm 32 |
1.1 安装步骤
Step1:切换root权限
sudo su
Step2:解压缩(本文以Linux 64为例)
tar –xzvf MVS-2.1.0_x86_64_20201228.tar
Step3:进入文件夹,运行安装脚本
- cd MVS-2.1.0_x86_64_20201228/
- ./setup.sh
提示:安装完成后,/opt路径下会生成MVS文件夹,包含以下内容


二、MVS运行
Step1:进入bin目录,运行MVS,即可打开客户端
- cd /opt/MVS/bin/
- ./MVS


三、示例程序运行
Step1:进入Samples目录下,可查看工业相机SDK提供的示例程序(C和Python)

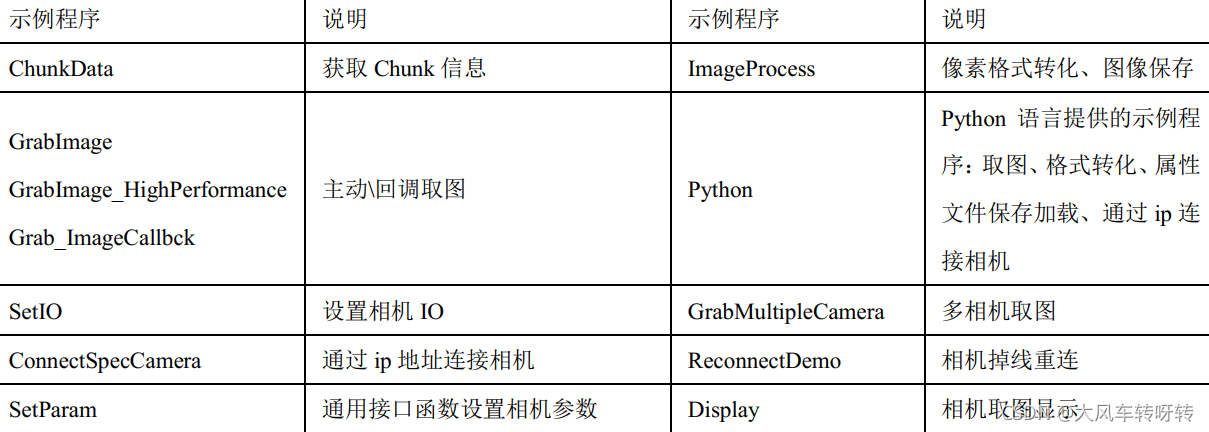
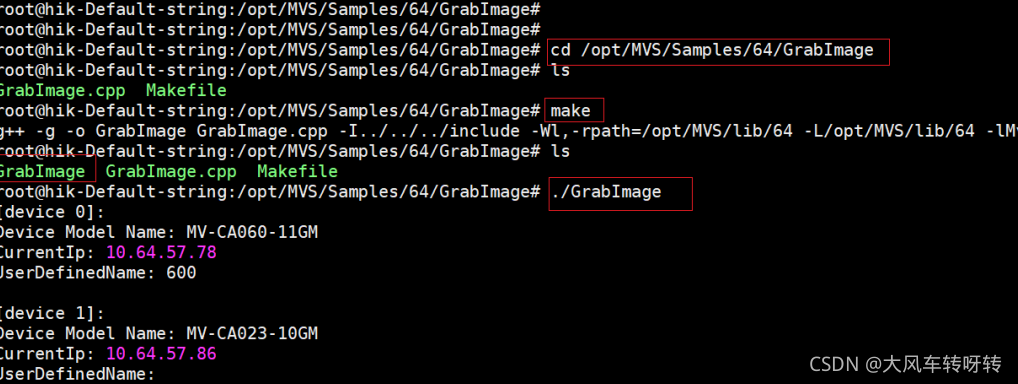
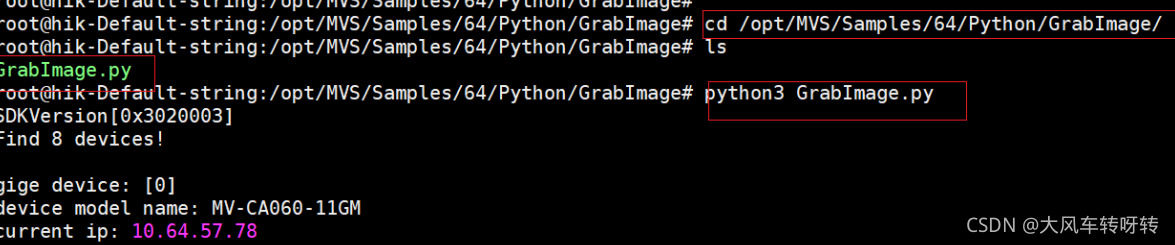
Step2:进入GrabImage文件夹,编译程序,运行程序(下图为C和Python示例程序运行)
Step3:详细接口介绍,可参考doc文件夹下的SDK手册
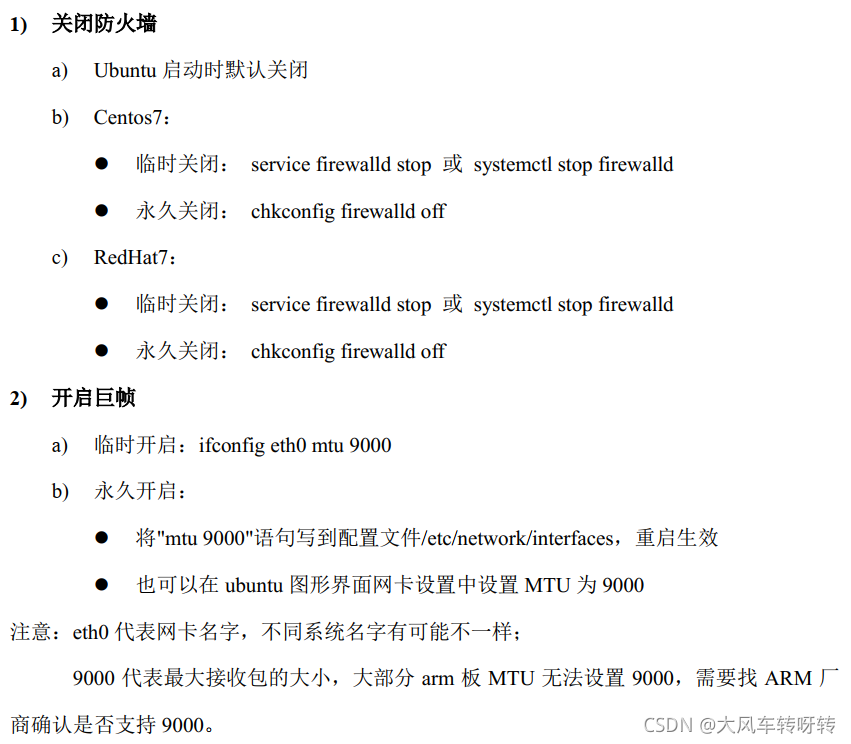
五、Linux使用注意事项
1. 网口相机使用时需要关闭防火墙,开启网卡巨帧

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)