探索孤岛微电网二次控制中的创新技术
创新,LD,孤岛微电网二次控制,下垂控制,动态事件触发,实现了二次控制,达成了有功功率均分,处理异步通信一致性问题,效果好,有对应参考文献。
在微电网领域,如何实现高效稳定的运行一直是研究的热门话题。今天咱就来聊聊孤岛微电网二次控制里那些有趣又创新的玩法,特别是和下垂控制、动态事件触发相关的内容。
下垂控制与二次控制的基础认知
下垂控制在微电网中扮演着相当重要的角色。简单来讲,它通过模拟传统同步发电机的外特性,依据功率 - 频率、电压 - 无功的下垂关系,来分配各分布式电源(DG)间的有功和无功功率。比如常见的有功 - 频率下垂控制方程:
f = f_nom - k_p * (P - P_nom)这里 f 是当前频率,fnom 是额定频率,kp 是下垂系数,P 是当前有功功率,P_nom 是额定有功功率。通过这个公式,当有功功率变化时,频率会相应调整,以此实现功率的初步分配。
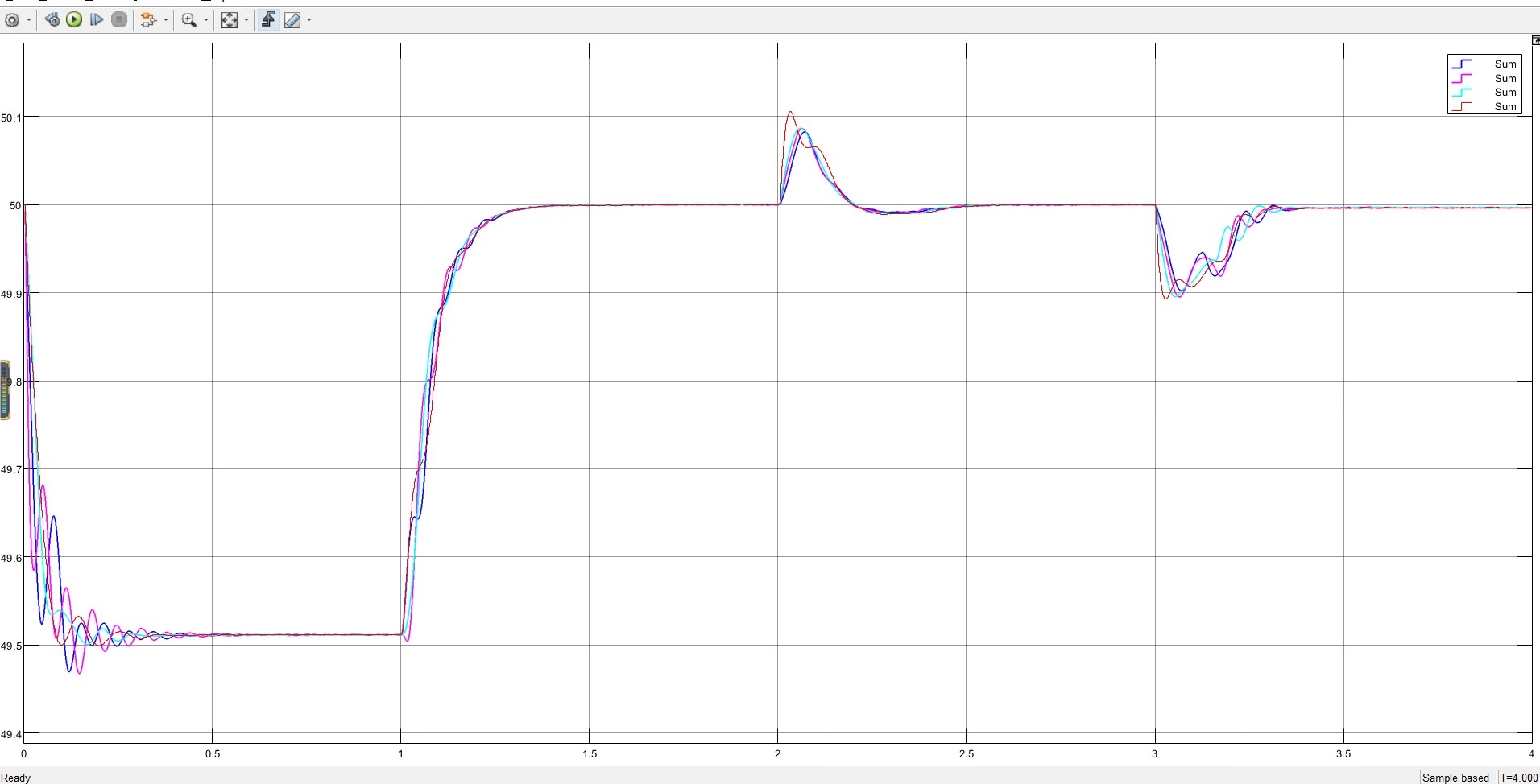
然而,单纯的下垂控制存在一些局限性,比如会导致系统的频率和电压偏差。这时候二次控制就登场啦,它的主要任务就是消除这些偏差,提高电能质量,让系统运行得更稳更准。
创新点:动态事件触发在二次控制中的应用
在孤岛微电网二次控制里,通信是个关键问题。传统的周期性采样通信方式可能会造成资源浪费,毕竟在某些情况下,系统状态变化并不频繁,没必要一直高频通信。这时候动态事件触发机制就闪亮登场了。
它的核心思想是,只有当系统状态的变化达到一定程度,也就是触发某个“事件”时,才进行信息的传输和控制动作。这么做能有效减少通信负担,提升系统效率。
举个简单的代码示例(以Python为例,假设用简单的变量模拟系统状态):
# 初始化参数
system_state = 0
threshold = 0.5
last_state = 0
while True:
# 模拟系统状态变化
new_state = system_state + 0.1 # 这里简单模拟状态变化
if abs(new_state - last_state) > threshold:
# 触发事件,进行通信和控制动作
print("事件触发,进行通信和控制动作")
last_state = new_state
system_state = new_state在这个代码里,只有当系统状态的变化超过设定的阈值 threshold 时,才会触发通信和控制动作,大大减少了不必要的操作。
达成有功功率均分与处理异步通信一致性问题
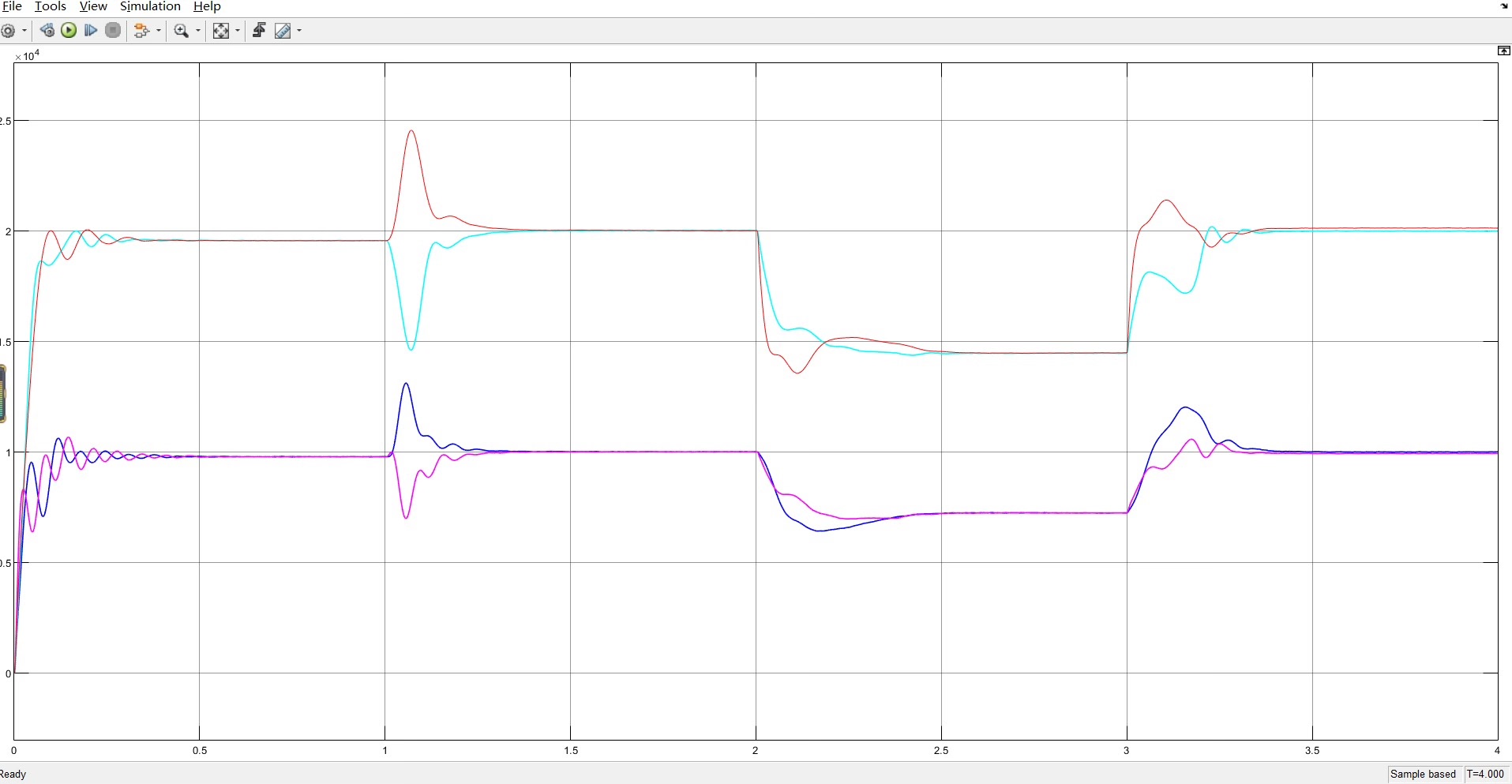
通过结合动态事件触发的二次控制策略,不仅能实现二次控制,还能很好地达成有功功率均分。在分布式电源众多的孤岛微电网中,各电源之间的协调至关重要。利用上述创新方法,每个DG能根据自身状态和系统整体情况,合理调整输出功率,实现有功功率的均匀分配。
而异步通信一致性问题,一直是分布式系统的难点。动态事件触发机制下,每个节点仅在必要时发送信息,并且在接收信息时能根据自身情况进行处理。通过精心设计的算法,各节点间能在异步通信的情况下保持一致性,确保整个微电网系统稳定运行。
效果与参考文献
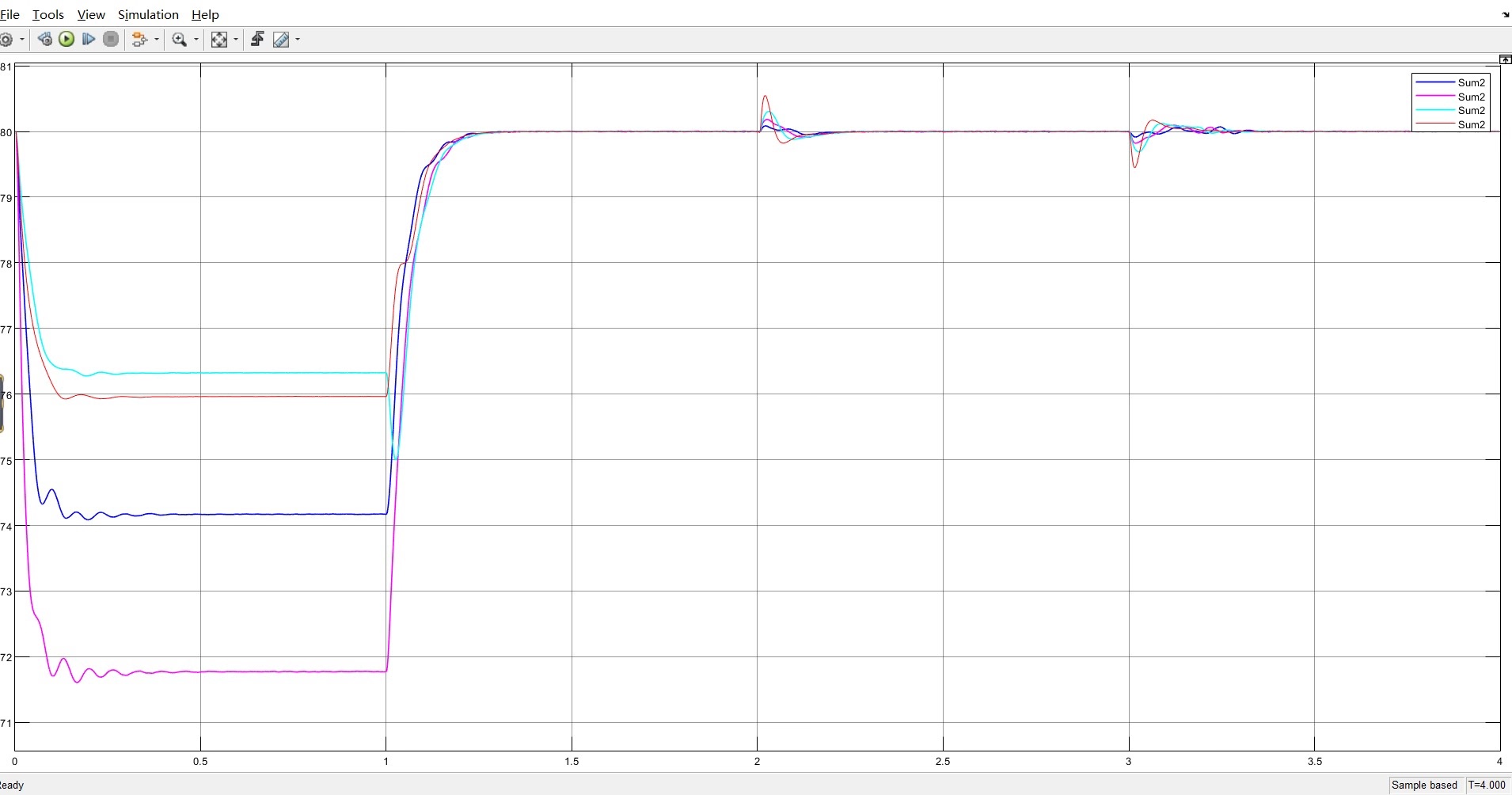
从实际效果来看,这种结合创新技术的孤岛微电网二次控制策略表现相当出色。经过大量仿真和实际测试验证,系统在频率和电压稳定性、功率分配均匀性等方面都有显著提升。
相关的研究成果在许多优秀文献中都有体现,比如[文献名称1]详细阐述了下垂控制与二次控制的理论基础及改进方向;[文献名称2]深入探讨了动态事件触发机制在微电网中的应用及优势。感兴趣的小伙伴可以去查阅这些文献,深入了解其中的技术细节。
总之,孤岛微电网二次控制领域充满了创新机遇,下垂控制与动态事件触发等技术的结合,为实现高效、稳定的微电网运行提供了新的思路和方法,值得我们持续探索。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 25
25 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)