基于RobotStudio的工业机器人激光切割工作站离线编程与仿真全流程实战
摘要:
本文详细记录了使用ABB RobotStudio软件搭建激光切割工作站的完整过程。从工作站布局、离线轨迹生成,到目标点姿态调整、程序优化及仿真验证,再到最后的碰撞检测与TCP跟踪,系统性地阐述了工业机器人离线编程的核心技术要点与操作技巧。
一、引言
随着工业自动化水平的不断提高,工业机器人离线编程技术在复杂加工领域(如激光切割、焊接)的应用日益广泛。离线编程不仅能够提高编程效率,还能有效避免现场调试带来的停工风险。近期,我深入学习并实践了基于RobotStudio的激光切割工作站仿真项目,现将整个工程的操作流程、软件使用方法以及个人的学习感悟整理成文,希望能对正在学习RobotStudio的朋友们有所帮助。
二、项目准备与工作站搭建
1. 软件环境与任务目标
本次实践使用的是ABB官方仿真软件RobotStudio。项目的核心任务是为一个待加工工件编写激光切割离线程序,要求机器人末端执行器(激光头)能够沿着工件边缘精确运动,并保证姿态正确、运行流畅且无碰撞风险。
2. 搭建物理环境
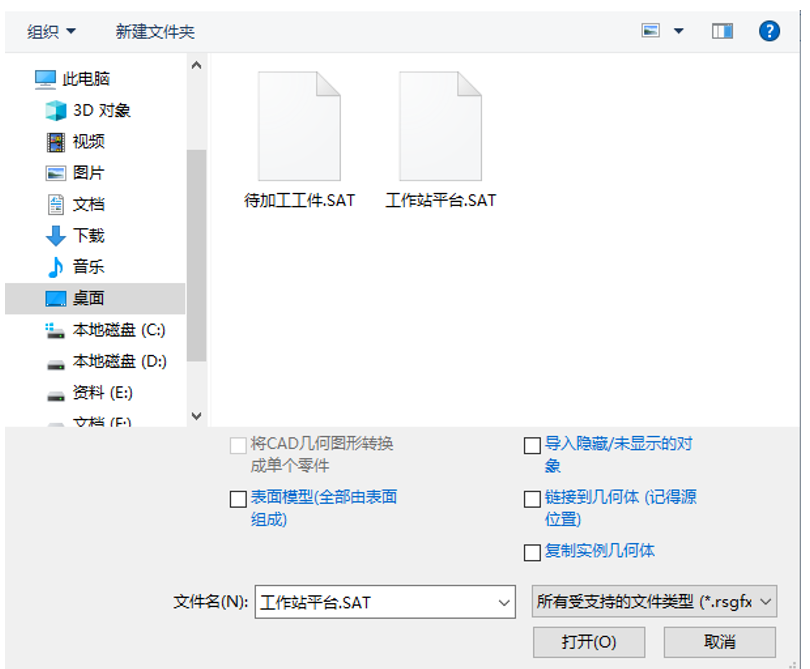
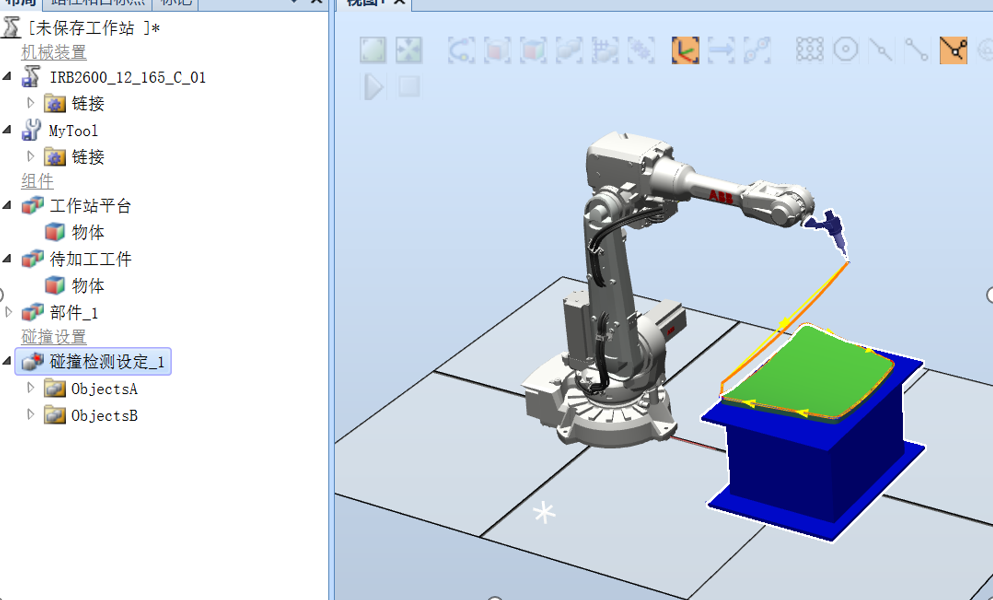
首先新建了一个空工作站,并依次导入了核心组件:
• 机器人本体: 导入了IRB 2600型号机器人。
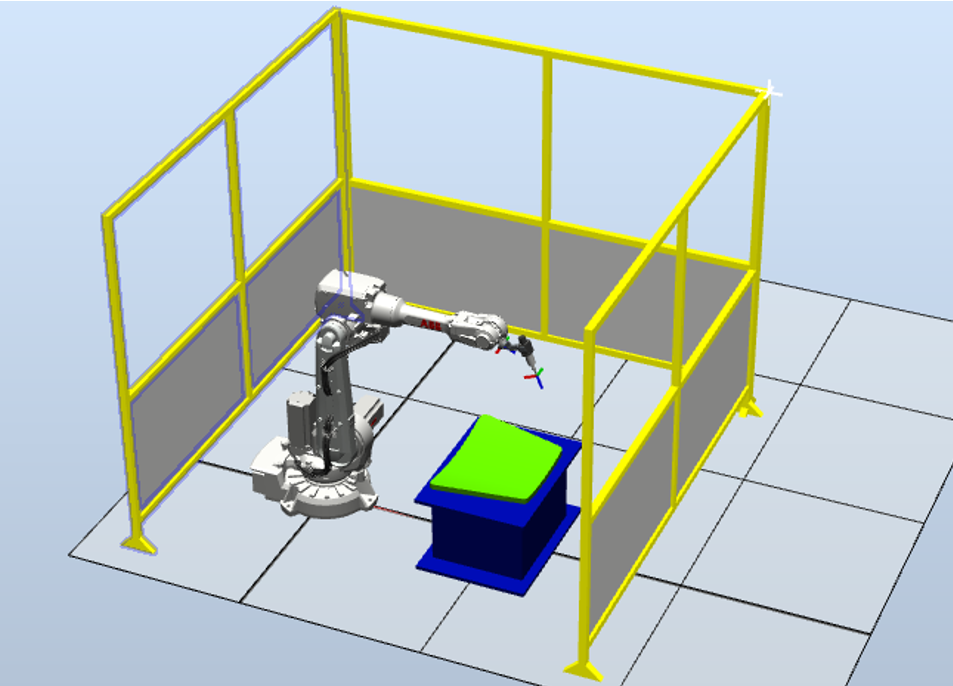
• 工具与工装: 导入了自定义工具MyTool,并将其安装到机器人法兰盘上;同时导入了工作站平台和待加工工件。
• 布局调整: 利用“显示机器人工作区域”功能,调整工件与平台的位置,确保切割路径位于机器人的可达工作空间内。通过“捕捉中点”和“偏移位置”功能,我将工件精确放置在平台中央(X负方向偏移50mm),并添加了护栏等安全设施。
3. 系统与坐标系配置
在布局完成后,我通过“从布局创建系统”功能生成了机器人系统。为了方便后续编程,我创建了一个基于工作站平台特征点的工件坐标系(Workobject_1),并将其设置为当前任务的默认坐标系。
三、离线轨迹生成与核心调整
1. 自动生成轨迹路径
在“建模”选项卡下,我利用“表面边界”功能快速提取了待加工工件上表面的轮廓曲线。随后,在“基本”选项卡中使用“自动路径”功能:
• 选择曲线: 选取刚才创建的轮廓线。
• 参数设置: 参照文档建议,我选择了“圆弧运动”模式,设置最小距离为5mm,最大半径为100mm。这种设置能保证在圆弧处生成圆弧指令,直线处生成线性指令,有效平衡了路径精度与程序点数。
2. 目标点姿态调整(关键难点)
自动生成的路径虽然有了轨迹,但部分目标点的姿态(如Target_10)机器人可能无法到达。这是我在学习中遇到的第一个难点,解决方法如下:
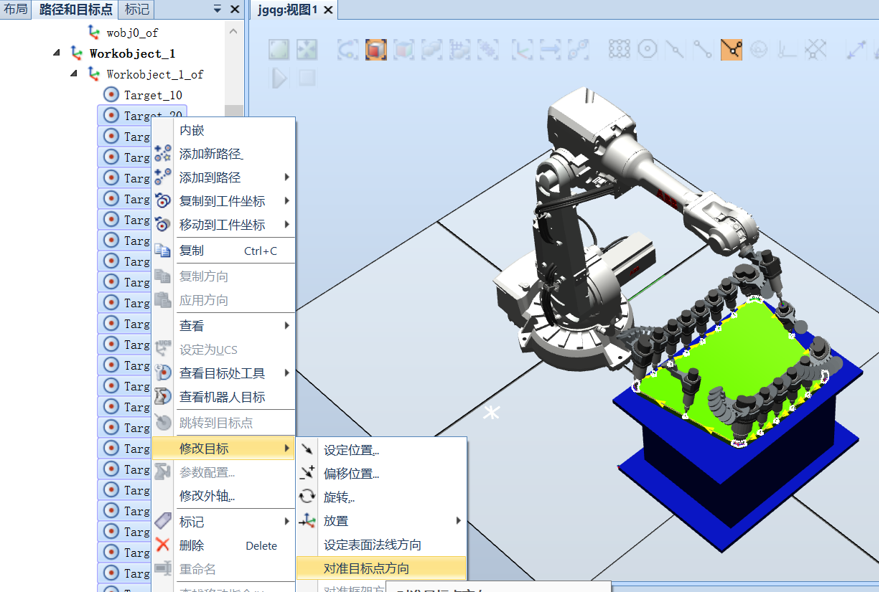
• 手动旋转: 选中难以到达的目标点,使用“修改目标”->“旋转”功能,参考坐标系设为“本地”,将Z轴旋转-90度,使工具指向变得合理。
• 批量对齐: 为了保证所有点的Z轴垂直于工件表面,X轴方向一致,我利用“对准目标点方向”功能,以调整好的Target_10为参考点,将剩余所有点的X轴对齐,并锁定Z轴,实现了批量姿态优化。
3. 轴配置参数调整
为了解决机器人到达目标点时可能出现的奇异点或关节超限问题,我进行了轴配置参数的调整。通过右键点击目标点选择“参数配置”,优先选择各轴关节值较小的配置。对于整条路径,我使用了“自动配置”中的“线性/圆周移动指令”功能,让软件自动计算最优的关节角度。
四、程序优化与仿真验证
1. 路径逻辑优化
为了保证生产安全和程序规范,我参考文档[3]对自动生成的路径进行了“三步优化”:
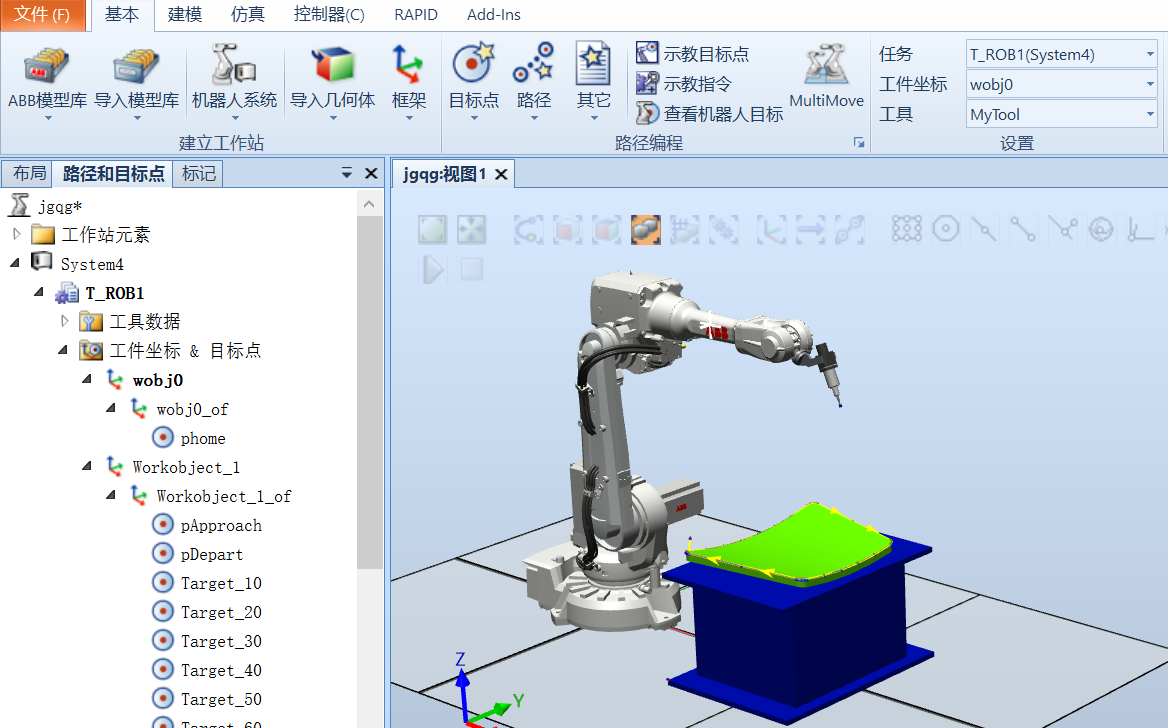
• 添加接近点(pApproach): 复制轨迹起点,沿Z轴负方向偏移50mm,作为安全下刀点。
• 添加离开点(pDepart): 复制轨迹终点,同样偏移作为抬刀点。
• 添加Home点: 将机器人机械原点设为安全位置pHome,并将其插入到路径的最前端和最后端,确保程序开始前和结束后机器人都处于安全位置。
2. 仿真运行
在优化完运动指令(如将部分MoveJ改为MoveL以保证轨迹)后,我进行了仿真验证:
• 同步RAPID: 将工作站数据同步到虚拟控制器。
• 设定入口: 在仿真设定中将入口点设为Path_10。
• 播放仿真: 点击播放,机器人能够流畅地从Home点出发,经过接近点、切割轨迹、离开点,最后回到Home点,无明显抖动或卡顿。
五、碰撞监控与TCP跟踪
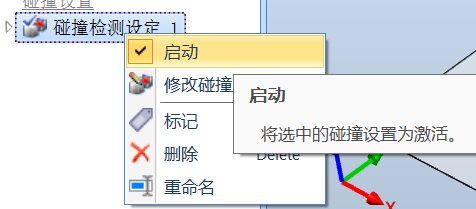
1. 碰撞监控设置
为了验证工作站的安全性,我利用RobotStudio的“碰撞检测”功能进行了测试:
• 创建检测集: 将工具MyTool设为ObjectsA,将工作站平台和待加工工件设为ObjectsB。
• 参数设定: 设置接近丢失距离为2mm。在仿真运行中,当工具距离工件过近时,系统会高亮显示颜色,有效预警了潜在的碰撞风险。
2. TCP轨迹跟踪
为了直观地观察切割路径的精度,我启用了“TCP跟踪”功能。通过设置轨迹颜色为橙色,隐藏其他辅助线,可以清晰地看到TCP(工具中心点)在空间中运行的实际轨迹,这为分析路径平滑度提供了极大的便利。
六、学习收获与感悟
通过这次完整的激光切割工作站仿真项目,我对RobotStudio软件的使用有了质的飞跃,主要收获如下:
1. 理论与实践的结合: 以前只知道MoveL和MoveJ指令,现在明白了在实际加工中,必须考虑工件坐标系、工具坐标系与机器人基坐标系之间的空间关系。
2. 姿态调整的艺术: 机器人编程不仅仅是“走到哪里”,更重要的是“怎么走”。目标点的姿态调整(旋转、对齐)是解决机器人“死机”或“无法到达”的关键,这需要很强的空间想象能力。
3. 安全意识的提升: 通过设置接近点、离开点和Home点,我深刻理解了工业现场安全规范的重要性。仿真软件中的碰撞检测功能是现场调试前的最后一道防线。
4. 软件操作熟练度: 掌握了“自动路径”、“对准目标点”、“TCP跟踪”等高级功能,大大提高了编程效率。
总结:
RobotStudio是一款功能强大的工具,但要真正用好它,不仅需要熟悉软件菜单,更需要具备扎实的机器人运动学基础和工艺知识。这次实践让我对工业机器人离线编程有了更全面的认识,也为我后续学习更复杂的轨迹应用打下了坚实的基础。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 12
12 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)