项目四ABB工业机器人激光切割工作站离线编程全流程实操|RobotStudio离线仿真项目实训纪实
前言
依托《工业机器人系统离线编程与仿真》课程项目四工业机器人激光切割工作站离线编程与仿真实训内容,带领学生在 RobotStudio6.08 软件平台完成从工作站搭建、轨迹创建、点位优化、仿真运行、碰撞监测、TCP 轨迹校验全流程实操。本项目选用 IRB2600 工业机器人搭载激光切割专用工具 MyTool,围绕钣金工件激光切割工艺开展离线编程实训,完整覆盖任务 4.1 至 4.4 四大模块实训内容。本文以项目实操日志形式记录项目整体进展、关键操作步骤、RAPID 核心程序、实操故障处理与实训学习心得,可供自动化专业师生、工业机器人现场工程师参考学习,全文结合实训实操要点展开详细论述。
项目整体进展
本激光切割离线编程实训项目分为四大阶段性任务,循序渐进完成工作站从 0 到落地仿真全流程,项目周期分为四个实施阶段,分批次完成功能落地:
阶段 1(任务 4.1):激光切割工作站搭建 + 离线轨迹曲线与原始路径生成
项目首期完成空白工作站新建、机器人本体、激光切割工具 MyTool、工作站平台、待切割钣金工件三维模型导入与空间布局校准;依托工件上表面轮廓提取切割轨迹曲线,基于三点法创建工件坐标系 Workobject_1,通过软件自动路径功能生成初始切割路径 Path_10,实现原始切割轨迹一键生成,完成项目硬件虚拟环境搭建与轨迹雏形创建,是整个项目的基础环节。本阶段解决模型导入错位、坐标系建立基准选取不合理两大基础问题,顺利产出原始加工路径。
阶段 2(任务 4.2):轨迹目标点姿态修正 + 机器人轴配置参数优化
自动生成的 Path_10 路径存在部分目标点机器人关节不可达、工具姿态不符合激光切割垂直下刀工艺要求问题,本阶段逐个核查目标点工具 TCP 姿态,单点修正基准点位旋转参数后批量统一全路径点位方向;完成单点轴配置手动选型与全路径自动轴参数配置,通过沿路径试运行验证点位可达性,消除机器人奇异位姿、关节超限报错隐患,让机器人物理结构可以完整跟随切割轨迹运动。
阶段 3(任务 4.3):离线轨迹程序优化 + 整机仿真调试运行
在原始切割路径首尾增加安全辅助点位:靠近工件的轨迹趋近点 pApproach、加工完成后退离开点 pDepart、机器人机械原点安全 Home 点 pHome,完善工艺安全逻辑;精细化修改每条运动指令的运动类型、运行速度、转弯区域参数;全路径自动轴参数二次校准,工作站环境数据同步 RAPID 程序,配置仿真运行参数后完成整机动态仿真,实现 “回安全原点→靠近工件→激光切割→退出工件→回归原点” 完整工艺动作闭环。
阶段 4(任务 4.4):碰撞监控配置 + TCP 轨迹跟踪检测
仿真运行基础上搭建碰撞检测组,区分机器人工具与工装工件碰撞监测对象,设置安全间隙阈值 2mm,实现近距离预警、实体碰撞变色提示;关闭碰撞监测后启用 TCP 轨迹跟踪功能,橙色轨迹线条实时记录激光切割 TCP 运行轨迹,通过轨迹复现校验路径加工精度,最终完成全项目可行性验证,确认整套离线程序满足现场激光切割生产安全与工艺标准。
项目落地成果总结:项目从空白工作站起步,最终形成一套可直接下装至实体 IRB2600 机器人的 RAPID 加工程序,虚拟仿真无碰撞、轨迹贴合工件切割轮廓,运动节拍满足激光切割工艺规范,项目全部实训任务 100% 完成,达到课程能力与知识目标要求。
- 关键步骤截图说明(精简配图标注,文字详述操作)
- 任务 4.1 关键截图说明(工作站搭建 & 原始路径创建)
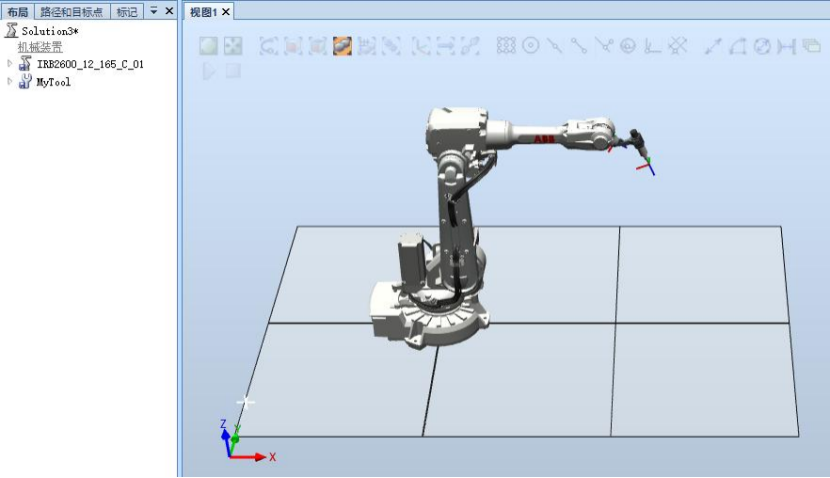
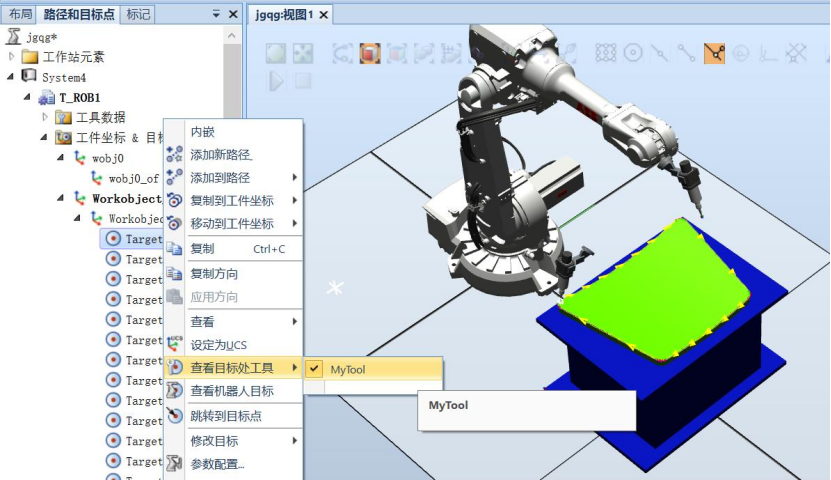
- 图 1:新建 jgqg 空白工作站 + IRB2600 机器人、MyTool 工具载入界面
基本选项卡导入 ABB 官方 IRB2600 机器人模型,在机器人末端法兰装配激光切割工具 MyTool,软件布局界面左侧工作站元素栏显示 T_ROB1 机器人、工具数据 MyTool,为本项目机械主体。
- 图 2:SAT 格式工作站平台、待加工工件几何体导入窗口
通过【导入几何体 - 浏览几何体】选取外部三维 SAT 模型,勾选表面模型导入参数,完成工装与工件模型载入,是虚拟产线物料搭建核心操作界面。
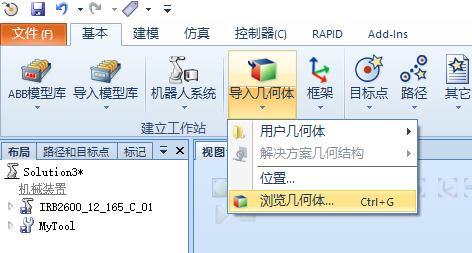 图 3:工件中点捕捉定位、偏移位置参数设置截图
图 3:工件中点捕捉定位、偏移位置参数设置截图
使用捕捉中点功能,三点定位将工件固定在平台中心,偏移位置对话框参考大地坐标,X 轴平移 - 50mm,Translation 参数(-50,0,0),完成工件精准居中摆放。
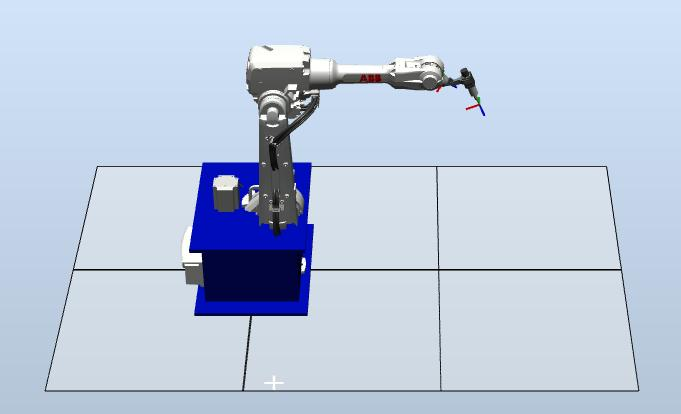 图 4:三点法创建 Workobject_1 工件坐标参数面板
图 4:三点法创建 Workobject_1 工件坐标参数面板
创建工件坐标弹窗,取点创建框架选择三点模式,依次拾取平台基准 X1、X2、Y 基准三点,生成加工专用工件坐标系,后续所有路径均基于本坐标系运算。
- 任务 4.2 (点位姿态与轴参数调整)
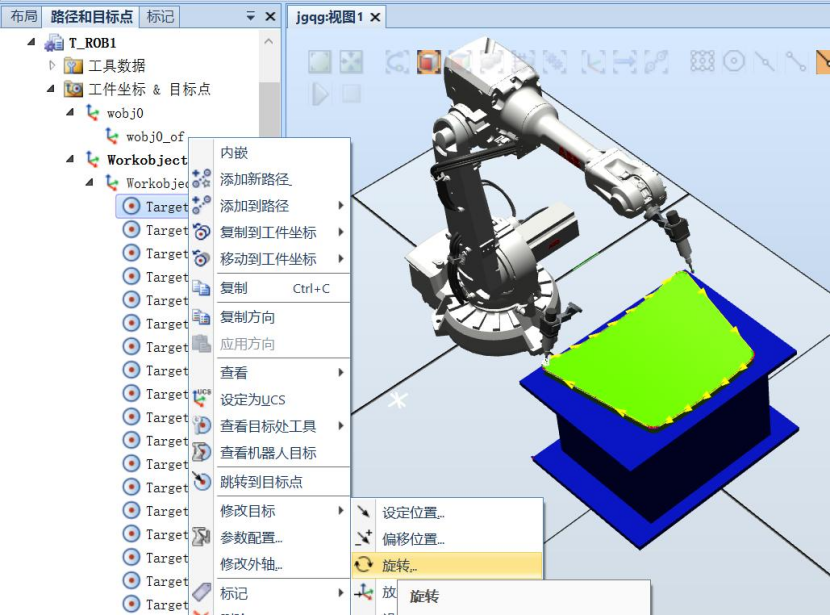
- Target_10 单点旋转修改参数弹窗
修改目标 - 旋转,参考本地坐标系,Z 轴旋转 - 90°,修正首个基准切割点工具姿态,解决激光头倾斜无法垂直切割问题。
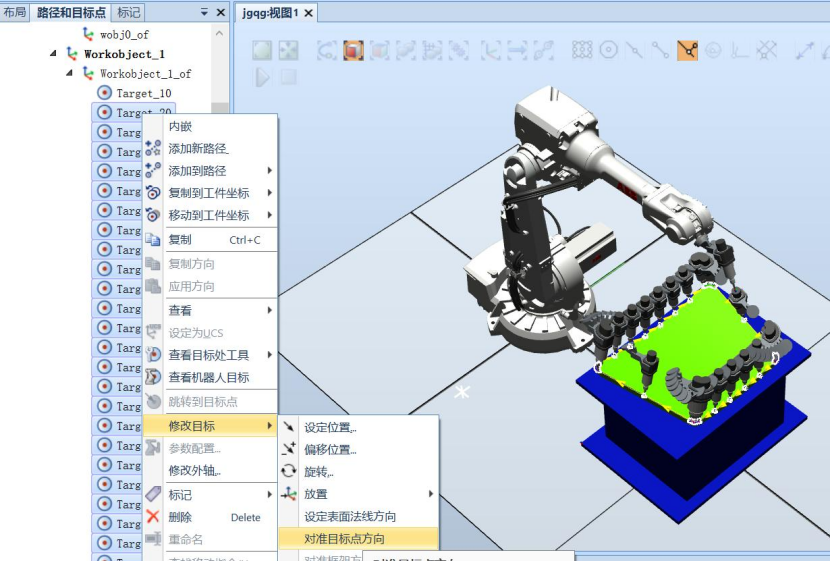
 批量对准目标点方向设置界面
批量对准目标点方向设置界面
全选剩余路径目标点,对准参考 Target_10、对准轴 X、锁定轴 Z,批量同步所有点位工具姿态,大幅提升点位调整效率。
 单点目标轴配置参数选择窗口
单点目标轴配置参数选择窗口
Target_10 参数配置界面,Cfg1~Cfg6 多组轴配置方案,优先选择关节数值最小的 Cfg 参数,规避机器人轴转角超限。
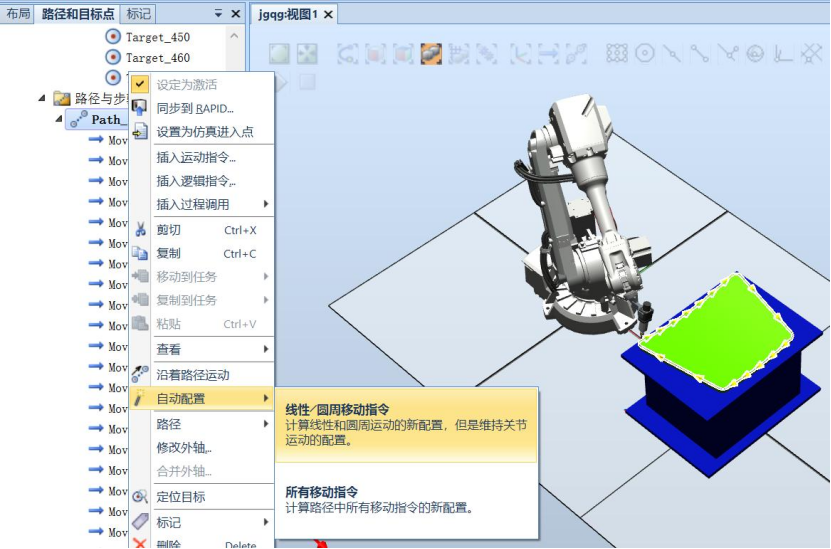
 Path_10 路径自动配置右键菜单栏
Path_10 路径自动配置右键菜单栏
右键路径选择【自动配置 - 线性 / 圆周移动指令】,全路径一键轴参数自动优化,【沿着路径运动】试运行校验点位可达性。
 任务 4.3 关键截图说明(程序优化 + 仿真运行)
任务 4.3 关键截图说明(程序优化 + 仿真运行)
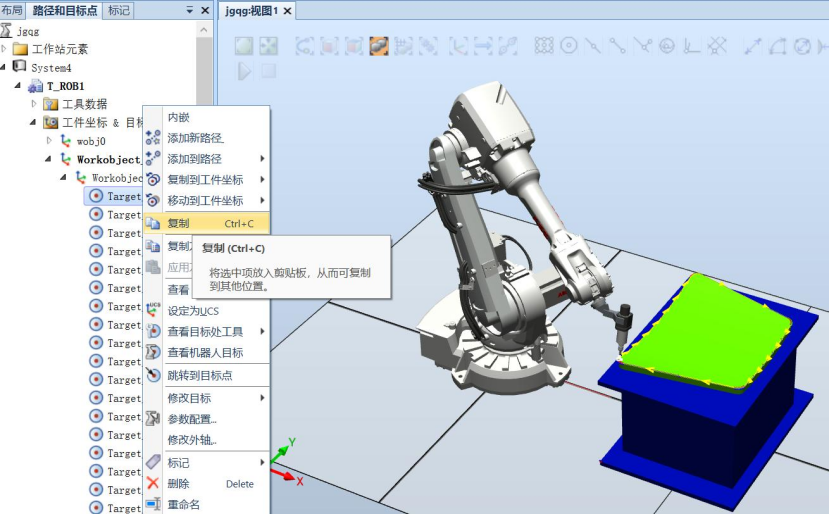
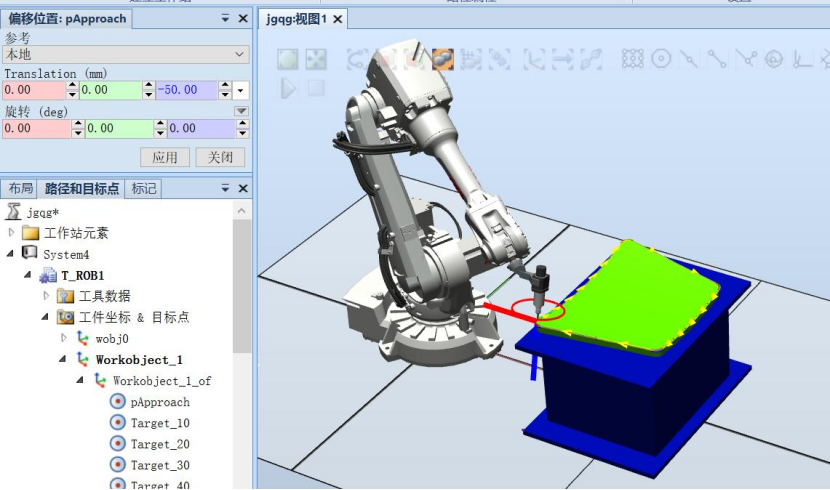
- 图 10:pApproach 点位 Z 轴偏移 - 50mm 设置截图
复制 Target_10 重命名 pApproach,偏移位置本地 Z=-50mm,生成工件上方 50mm 安全趋近点位;同理生成 pDepart 退出点位。
 机械原点 pHome 示教界面
机械原点 pHome 示教界面
机器人回到机械原点,Wobj0 大地坐标系下示教目标点 pHome,作为项目全局安全待机点位。
- 运动指令编辑参数面板(MoveL pApproach)
编辑指令:线性运动、速度 v600、Zone fine 精准点位,工具绑定 MyTool、工件坐标 Workobject_1,精细化工艺速度参数。
 任务 4.4 关键截图说明(碰撞监控 + TCP 跟踪)
任务 4.4 关键截图说明(碰撞监控 + TCP 跟踪)
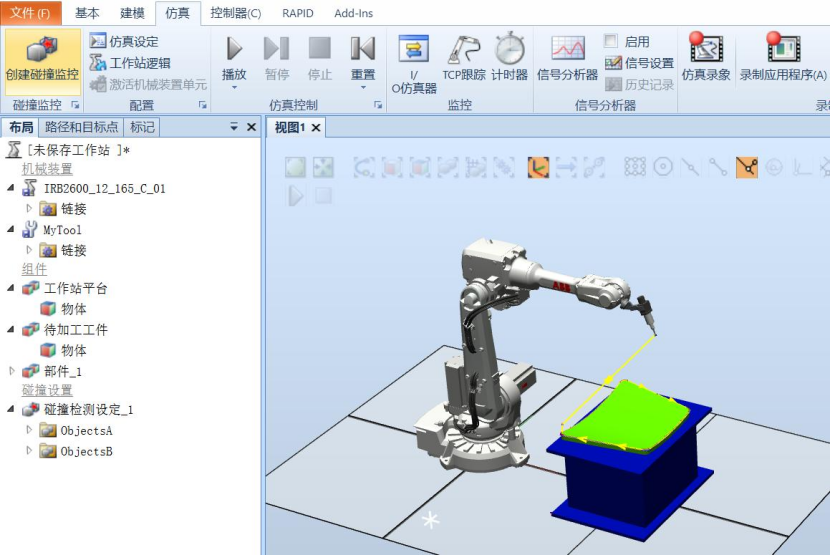
- 图 15:碰撞检测设定分组界面
碰撞集 ObjectsA 放入 MyTool 激光头,ObjectsB 放入工作站平台 + 待加工工件,区分碰撞监测主体与被碰撞工装。
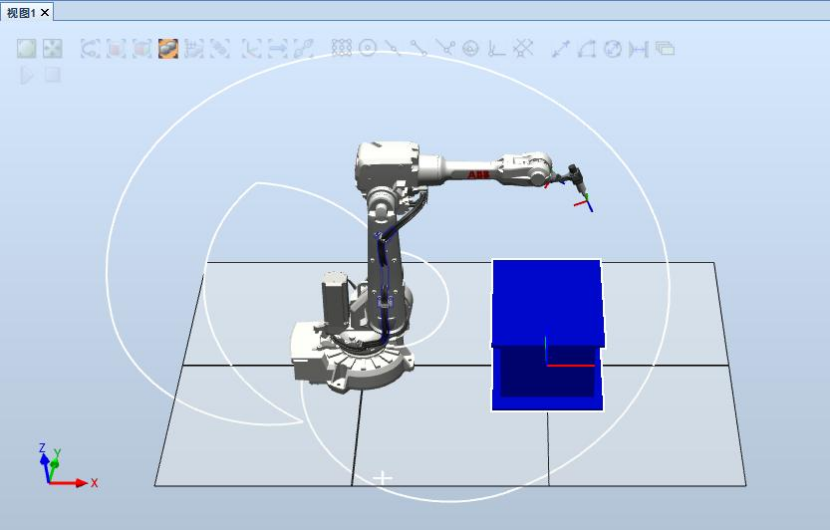
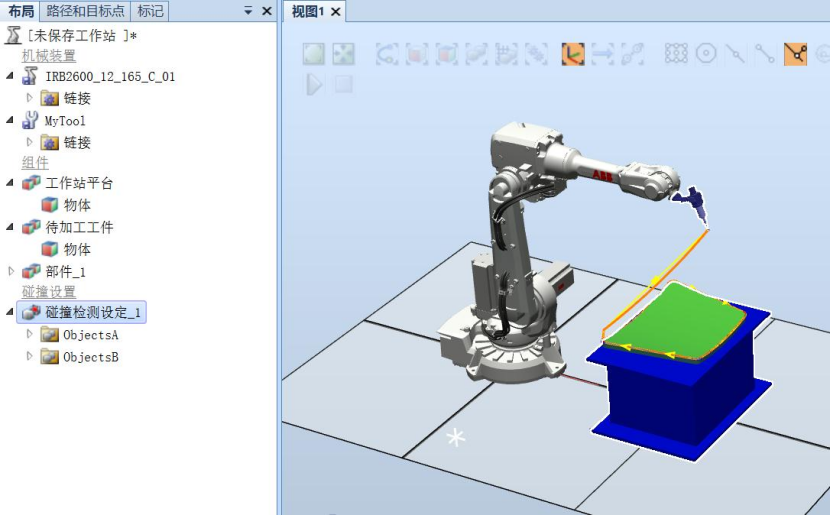
 仿真运行 TCP 轨迹成品效果图
仿真运行 TCP 轨迹成品效果图
机器人完整走完切割路径,工件上方留存完整橙色闭合切割轨迹,直观验证路径精度。.
 项目核心 RAPID 指令代码(分段注释,激光切割完整程序)
项目核心 RAPID 指令代码(分段注释,激光切割完整程序)
项目经【同步到 RAPID】自动生成底层程序,结合人工优化运动参数,最终生成 Module1 模块核心 RAPID 代码,分为 \\ 安全点位定义、主程序 PROC Main ()、切割路径子程序 PROC Path_10 ()\\ 三大部分,代码附带工艺注释,是离线编程落地实体机器人的核心文件:
|
RAPID |
关键指令释义
- MoveJ:关节运动:用于 pHome 安全点位远距离移动,不受直线轨迹约束,机器人以最优关节角度快速走位,速度常用 v1000;
- MoveL:线性运动:激光切割核心运动指令,保证 TCP 沿直线精准走刀,切割点位限速 v100、趋近点位 v600,fine 代表精准到位无圆角偏移,满足钣金精密切割工艺;
- WObj:=XXX:绑定对应工件坐标系,区分大地坐标 wobj0(安全点)与加工坐标 Workobject_1(切割点位),是离线编程坐标体系核心指令;
- tooldata/wobjdata:RAPID 底层工具、工件坐标数据,由 RobotStudio 同步自动生成,确保仿真与真机参数完全统一。
- 实训过程遇到的困难及对应解决方法
全项目四阶段实训中,学生集中出现模型布局、点位不可达、运动报错、仿真碰撞、轨迹失真五大类实操故障,结合现场调试经验整理故障现象、诱因、落地解决方案,也是本项目实训重难点:
故障 1:任务 4.1 阶段,导入工件模型错位、无法居中放置
故障现象:导入工作站平台与待加工工件后,工件自由漂浮、捕捉基准点失效,偏移坐标后位置错乱,无法固定在平台几何中心。
故障原因:①几何体导入时未勾选【表面模型】,三维模型曲面缺失,捕捉中点功能无法识别实体特征;②捕捉模式误选为捕捉端点,而非捕捉几何中点;③工件未解除模型链接属性,偏移指令无法生效。
解决方案:1. 重新导入 SAT 模型,勾选全部由表面组成选项,保证模型实体化;2. 切换捕捉设置为【中点捕捉 - 主点从 / 到】两点定位模式;3. 右键工件断开与库文件链接,解除锁定后执行 X 轴 - 50mm 偏移,完成居中定位。
故障 2:任务 4.2 阶段,部分目标点机器人关节超限、点位红色报错不可达
故障现象:查看 Target_10 等点位工具姿态侧翻,机器人仿真单点位跳转直接报错,关节轴超出 ±360° 行程,无法抵达目标坐标。
故障原因:自动生成路径默认工具姿态随机,激光切割头未垂直工件表面,机器人腕部奇异位姿;系统默认轴配置参数不合理,关节旋转度数超限。
解决方案:1. 单点 Target_10 本地 Z 轴旋转 - 90° 修正工具垂直姿态;2.Shift 全选剩余点位,以 Target_10 为基准批量对准 X 轴、锁定 Z 轴,统一全路径工具朝向;3. 单点手动更换低关节数值 Cfg 轴参数,全路径右键自动配置线性圆周轴参数,沿路径试运行消除奇异报错。
故障 3:任务 4.3 阶段,添加 pApproach/pDepart 点位后仿真机器人剐蹭工件
故障现象:优化路径添加趋近与离开点位后,机器人从 pHome 下落过程中激光头撞击工件上表面,仿真中断。
故障原因:pApproach 点位 Z 轴偏移数值设置错误(大于 0 向工件内部偏移)、运动指令速度过快,接近工件瞬间来不及减速。
解决方案:1. 重新修改 pApproach 偏移参数,本地 Z=-50mm,向工件 Z 负方向抬高 50mm 安全距离;2. 修改 pApproach 对应 MoveL 指令 Speed 由 v1000 降至 v600,降低靠近进给速度;3.pDepart 同样抬高 Z 向安全高度,避免切割完成抬刀不足剐蹭钣金。
故障 4:同步 RAPID 后仿真无法启动,提示任务路径未找到
故障现象:完成程序优化同步 RAPID,仿真设定选定 Path_10 后点击播放无动作,控制器弹窗报错找不到程序入口。
故障原因:同步 RAPID 弹窗未全选工件坐标、工具数据同步选项,仅同步路径导致 MyTool、Workobject_1 参数缺失;仿真进入点选错任务程序。
解决方案:重新执行【同步到 RAPID】,全勾选工作坐标、工具数据、路径目标三项内容;仿真设定 T_ROB1 进入点严格指定 Path_10,清空旧仿真缓存后重启仿真。
故障 5:任务 4.4 碰撞监测失效,近距离不预警,TCP 轨迹空白无线条
故障现象 1(碰撞):工具贴近工件小于 2mm 无颜色提示,碰撞设置分组颠倒,工具放入 ObjectsB、工件放入 ObjectsA;
解决方案:重新分组 ObjectsA=MyTool 激光头、ObjectsB = 平台 + 工件,接近丢失参数重置 2mm,勾选启动碰撞监控。
故障现象 2(TCP):启用 TCP 跟踪播放仿真无橙色轨迹;
解决方案:隐藏全部目标点与路径标记,勾选【模拟开始时清除旧轨迹】,重新启动仿真录制 TCP 轨迹。
- 项目实训个人心得(教师授课 + 实操双重感悟)
从课程教学设计、学生实训成长、工业落地应用三个维度分享本次激光切割离线编程项目实训心得,结合多年机器人自动化教学经验总结:
- 课程教学设计心得:分层实训符合职业教育技能养成规律
本项目拆分 4.1~4.4 四个递进式任务,从硬件搭建→原始轨迹→点位修正→程序优化→仿真校验循序渐进,完美贴合高职学生从具象建模到抽象编程的认知逻辑。以往授课直接上手 RAPID 代码编程,学生难以理解坐标、点位底层逻辑,依托 RobotStudio 可视化离线仿真,学生先看见机器人动作再理解指令含义,大幅降低工业机器人编程学习门槛。激光切割工艺选型实训也贴合当下钣金加工行业主流应用,实现课程内容对接企业岗位需求,做到岗课赛证融合落地。
在备课过程中发现,自动路径生成是本项目核心重难点,圆弧运动、线性、常量三种生成模式的区别,单纯课本文字讲解晦涩,依托本项目工件轮廓实操对比:线性生成海量细碎点位、常量点位疏密不均、圆弧运动兼顾精度与点位数量最优,学生通过三次参数试错直观掌握参数选型逻辑,实训教学效果远高于纯理论授课。
- 学生实操学习成长心得:从软件小白到独立完成离线项目
实训初期多数学生存在 “重鼠标点击、轻工艺逻辑” 问题,机械照搬操作步骤,不理解 pApproach、pHome 安全点位的工艺意义,只知道复制偏移点位。经过故障排查引导后,学生逐步理解:工业现场激光切割不能直接从安全原点扎入工件,必须设置上方趋近点防止撞刀,Home 机械原点是设备待机、故障复位安全位置,所有辅助点位设计均源于现场安全生产规范。
经过全流程实训后,学生能够独立完成:自定义工件坐标系、自主优化运动速度参数、排查碰撞与点位报错,从只会跟着教程点击软件,转变为按照激光切割生产工艺自主设计离线程序,树立工艺优先、安全第一的自动化编程思维,这也是本实训课程最核心的育人目标。
- 工业落地应用感悟:离线编程是智能制造降本增效关键手段
结合一线自动化项目落地经验,传统现场示教编程需要停机占用实体机器人、人工反复校正点位,大型钣金激光切割工装换型调试动辄数小时;而 RobotStudio 离线仿真可以在电脑端提前完成全路径编程、碰撞校验、TCP 轨迹精度检测,仿真无误后将 RAPID 程序直接下装真机,设备不停产即可完成新产品程序调试。
本次实训项目的整套程序,经过简单机型适配即可直接用于实体 IRB2600 激光切割产线,从虚拟仿真到现实落地无缝衔接。同时碰撞监控功能在项目中的应用,规避真机调试撞机损坏激光头高额维修成本,TCP 轨迹跟踪可以批量复现加工轨迹用于工艺优化,这也是目前智能制造车间大力普及机器人离线编程的核心原因。
- 后续教学优化改进方向
- 下一阶段实训增加异形圆弧工件切割拓展任务,强化自动路径圆弧参数调试练习;
- 增加 RAPID 手动手写代码训练,脱离软件自动生成代码,加深学生对运动指令语法理解;
- 接入实体 IRB2600 机器人,完成离线程序仿真→真机下装联机调试,打通虚拟仿真与实体设备最后一环。
结语
本次工业机器人激光切割工作站离线编程全项目实训,完整落地从虚拟工作站搭建到仿真验收全链条工作,依托 RobotStudio 软件实现工艺可视化编程。从 4.1 基础建模到 4.4 碰撞 TCP 校验,每一步操作都紧扣工业现场激光切割实际生产标准,整套 RAPID 程序经过仿真验证安全无干涉。无论是授课教师的课程打磨,还是学生的技能提升,本项目都实现理论知识向实操技能的转化。在智能制造高速发展的当下,机器人离线编程已经成为自动化工程师必备核心技能,后续持续深挖项目拓展内容,优化实训教学方案,持续为自动化行业输送实操型技术人才。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)