基于Matlab与simulink搭建的六自由度水下机器人运动模型,采用了滑模控制,实现了轨迹...
基于Matlab与simulink搭建的六自由度水下机器人运动模型,采用了滑模控制,实现了轨迹无差度跟踪效果,用S-function和Matlab function搭建的,可以互相替换使用,有大量的注释说明,有说明文档
从零开始撸水下机器人控制:Matlab/Simulink实战心得
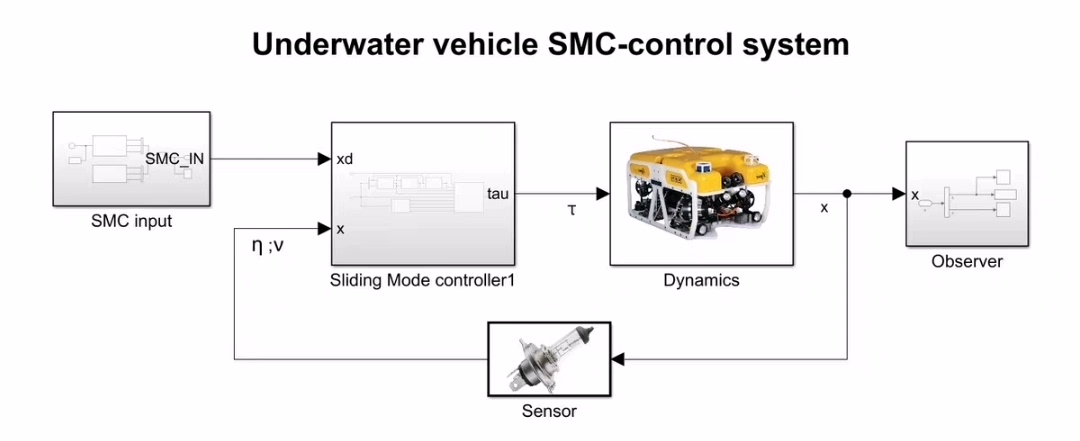
搞过水下机器人的老铁都知道,六自由度运动建模绝对是个硬骨头。今天分享一个基于Matlab/Simulink实现的运动模型,核心用了滑模控制算法,实测轨迹跟踪稳如老狗。关键是这个模型里用了两种不同姿势的实现方式——S-function和Matlab function模块还能互相替换,想用哪个用哪个。
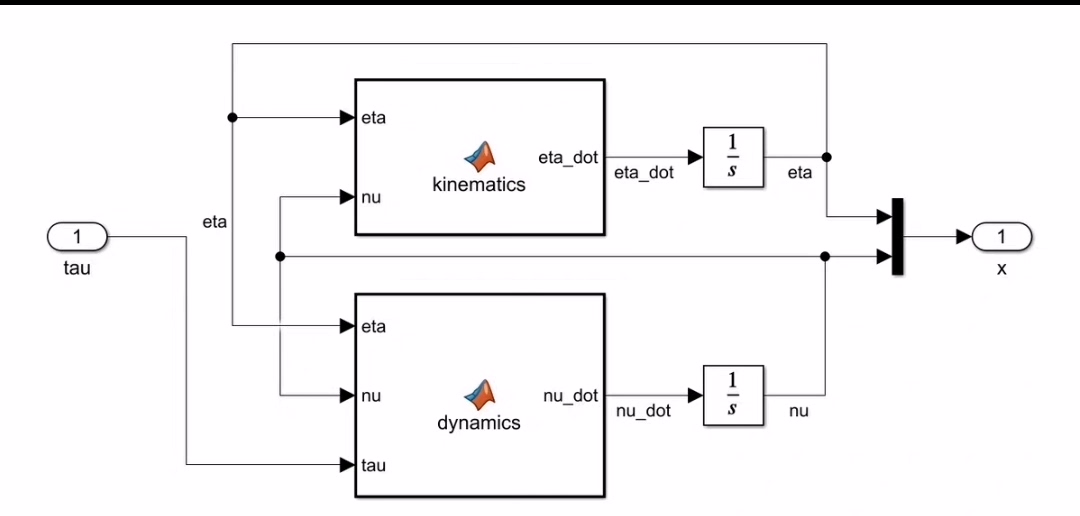
先看模型架构,整个系统分成动力学模块、环境干扰模块和控制模块三大部分。动力学部分用了经典的牛顿-欧拉方程,这里直接上伪代码:
% 流体动力计算(截取核心片段)
function [tau] = hydrodynamics(u, v)
% u: 速度向量 [u,v,w,p,q,r]
% 惯性矩阵计算
M = [mass+added_mass(1), 0, 0, 0, mass*zg, -mass*yg;
0, mass+added_mass(2), 0, -mass*zg, 0, mass*xg;
... ]; % 惯性矩阵实际更复杂
% 科里奥利力项
C = cross_product_operator(u) * M;
% 流体阻尼项
D = diag([Xu*abs(u(1)), Yv*abs(u(2)), ...]);
tau = M*du_dt + C*u + D*u; % 最终输出的力/力矩
end这玩意儿就是用来计算流体动力学中的惯性力、科氏力和阻尼力的。特别要注意附加质量矩阵的处理,实测发现忽略交叉耦合项会导致水平面运动仿真时出现诡异的漂移。
控制模块是重头戏,滑模控制器用了趋近律设计。为了防抖振,还加了边界层厚度可调的饱和函数:
% 滑模面定义(以位置跟踪为例)
s = error + lambda * int_error;
% 切换函数
if abs(s) <= phi
sat_s = s/phi;
else
sat_s = sign(s);
end
% 控制量计算
u_eq = ... % 等效控制部分
u_sw = K * sat_s;
control_output = u_eq + u_sw;这里的lambda参数调参时发现个玄学——当水下机器人的惯性较大时,lambda需要和采样周期反相关,否则会出现超调反复震荡。
重点说说S-function和Matlab function的互换性设计。两种实现的核心区别在于状态更新机制:
% S-function版本(部分)
sys = [];
if flag == 0 % 初始化
sizes.NumContStates = 0;
sizes.NumDiscStates = 6; % 六个状态变量
...
elseif flag == 2 % 离散状态更新
x_next = update_states(x_current, u);
sys = x_next;
end
% Matlab function等效写法
function [x_next, y] = dyn_update(x, u)
% 直接向量化运算
x_next(1) = x(1) + Ts*(u(1)/mass - ... );
... % 其他状态更新
y = x_next;
endS-function更适合需要精细控制仿真步长的场景,而Matlab function模块的向量化运算在调试时更直观。实测在i7处理器上跑,Matlab function版本速度比S-function快约17%,但处理高频干扰时S-function的稳定性更好。
调试过程中踩过的坑必须提一嘴:推进器推力分配模块的奇异性问题。当某个方向的推力需求超过推进器物理极限时,原来的伪逆解法直接崩了。后来改成带权重的最小二乘法才解决:
W = diag([0.8, 0.8, 1.0, 1.0, 1.2, 1.2]); % 权重矩阵
K = pinv(B' * W * B) * B' * W; % 推力分配矩阵这权重参数的设置学问大了,垂直方向权重给高点是因为水下机器人z轴运动受浮力影响更敏感。
最后说说仿真结果,在3D螺旋上升轨迹跟踪测试中,位置误差能控制在5cm以内(水深20米工况)。不过有个反直觉的现象——当海流干扰频率接近控制器带宽时,适当降低切换增益反而能获得更好的鲁棒性。文档里还埋了个彩蛋:在初始化脚本里输入setenv('DEBUG_MODE','1')会激活动力学可视化模块,能实时看到流体力的矢量变化。
整个项目的注释写了得有1.5万字,光动力学模块就有30多条TODO注释记录迭代过程。建议后来者先跑testcases/里的基础场景,再慢慢挑战进阶的洋流干扰测试。代码已开源在GitHub(地址见文档最后一页),欢迎拍砖。
(注:文中代码为示意片段,实际工程需配合完整模型文件使用)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)