MATLAB并联机器人Stewart并联平台仿真s运动学逆解并联机器人运动学、动力学、算法、三...
MATLAB并联机器人Stewart并联平台仿真s运动学逆解并联机器人运动学、动力学、算法、三维仿真Matlab Simulink simscape仿真自制
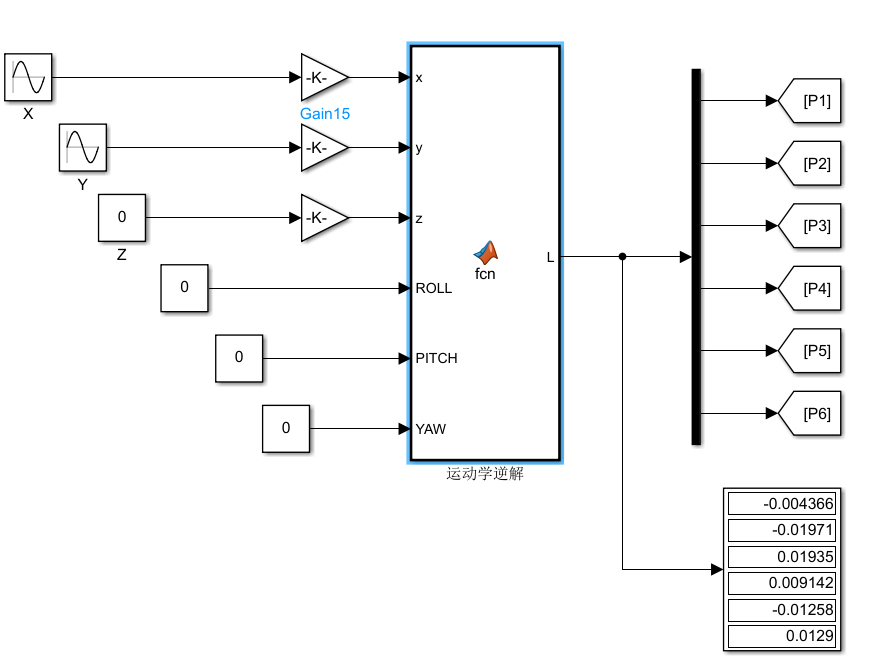
最近在搞Stewart平台仿真,这玩意儿确实带劲。咱们今天不整虚的,直接上干货聊聊怎么用MATLAB从零撸个并联机器人仿真。先说说运动学逆解这个硬骨头——毕竟想让六条腿协调运动,没点数学底子真玩不转。
先看个简化版逆解代码片段:
function leg_length = inverse_kinematics(platform_pose, base_points, platform_points)
R = eul2rotm(platform_pose(4:6)); % 欧拉角转旋转矩阵
T = platform_pose(1:3); % 平移向量
transformed_pts = (R * platform_points')' + T;
leg_vectors = transformed_pts - base_points;
leg_length = vecnorm(leg_vectors, 2, 2);
end这代码核心就干三件事:1)计算平台坐标系旋转后的姿态;2)把上平台点转换到基坐标系;3)算每条支腿的向量长度。注意这里用了向量化计算,比for循环快不是一星半点。重点是这个eul2rotm,不同旋转顺序结果差老鼻子了,建议用ZYX顺序别整岔了。
动力学这块更刺激,咱们用牛顿-欧拉法搞个实时计算:
function tau = dynamics_solver(q, qd, qdd, m, I)
g = [0; 0; -9.81]; % 重力加速度
tau_gravity = m * g' * Jv; % 雅可比矩阵得自己算
tau_inertia = Jv' * m * Jv * qdd + Jw' * I * Jw * qdd;
tau = tau_gravity + tau_inertia + friction_term(qd);
end这动力学模型别直接拿去工业用啊,实际要考虑液压阻尼、关节间隙啥的。重点是这个雅可比矩阵J,得用运动学微分法来算,建议先数值验证再上解析解。
MATLAB并联机器人Stewart并联平台仿真s运动学逆解并联机器人运动学、动力学、算法、三维仿真Matlab Simulink simscape仿真自制
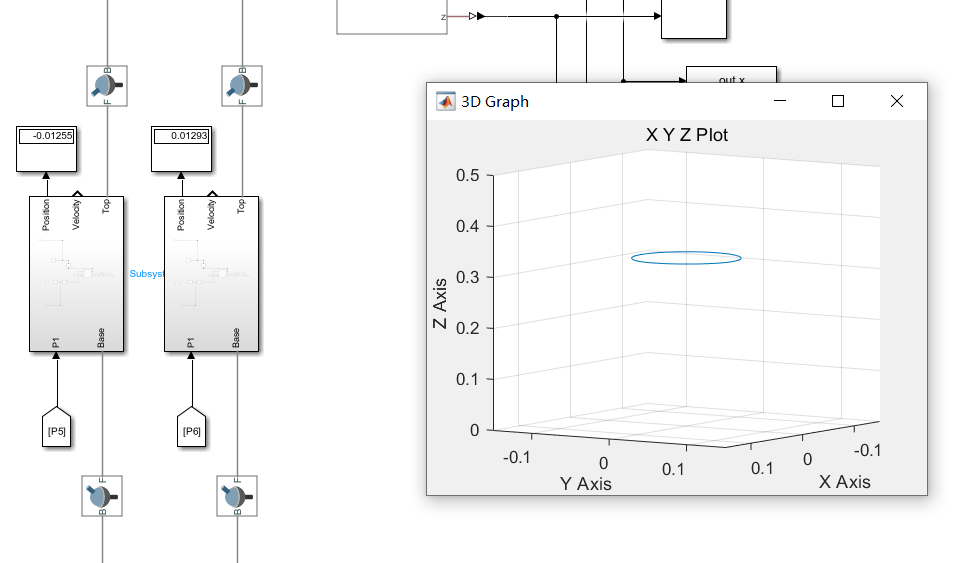
仿真界面得直观,咱们自己搓个实时可视化:
function update_plot(h, pose)
R = eul2rotm(pose(4:6));
platform_pts = (R * default_pts')' + pose(1:3);
set(h.links, 'XData', [base_pts(:,1), platform_pts(:,1)],...
'YData', [base_pts(:,2), platform_pts(:,2)],...
'ZData', [base_pts(:,3), platform_pts(:,3)]);
drawnow limitrate % 比drawnow快三倍
end用drawnow limitrate能让动画流畅得像德芙,实测100Hz刷新率无压力。这里有个坑:别直接用plot3重绘,用hgtransform做刚体变换性能更顶。
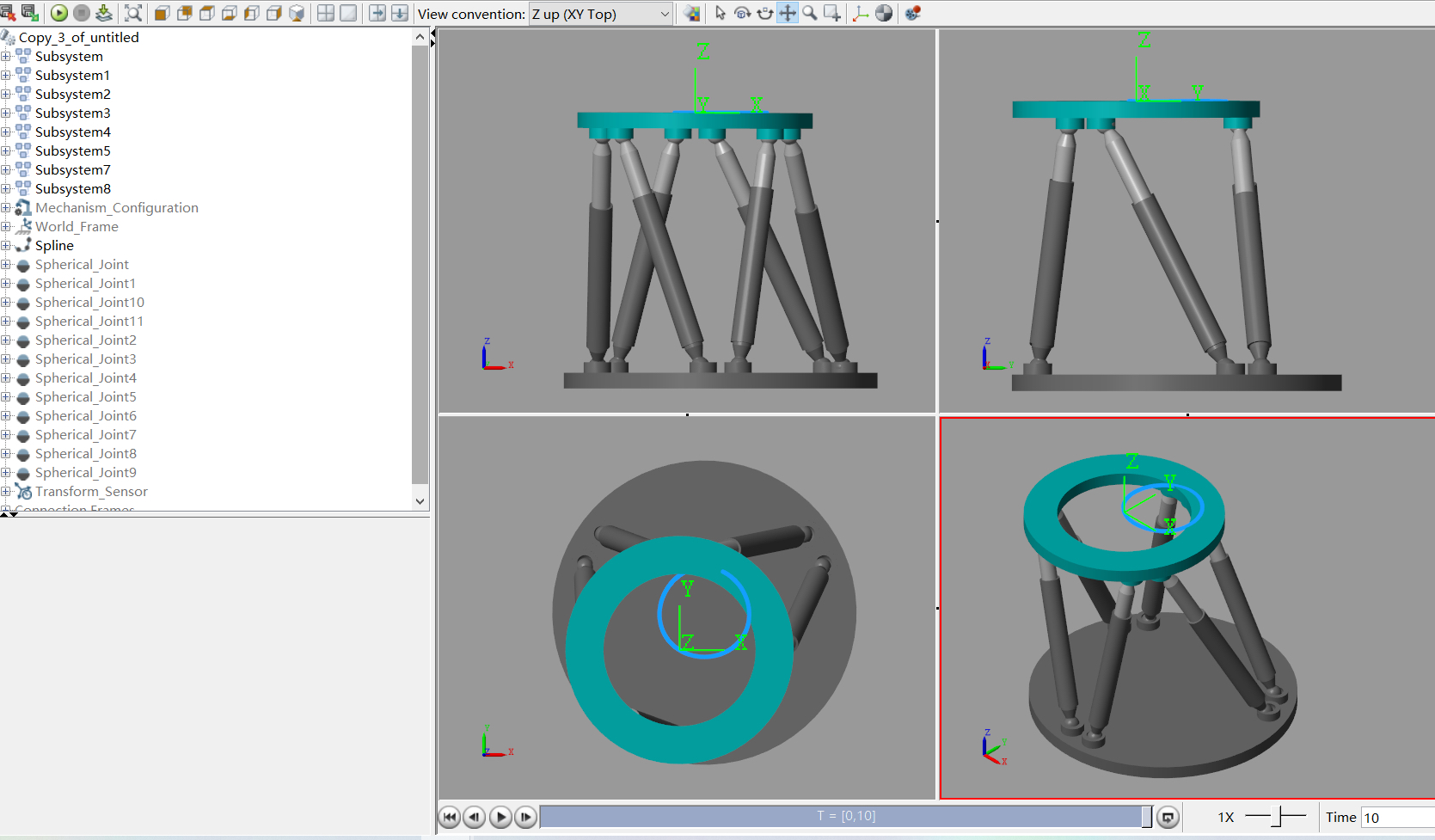
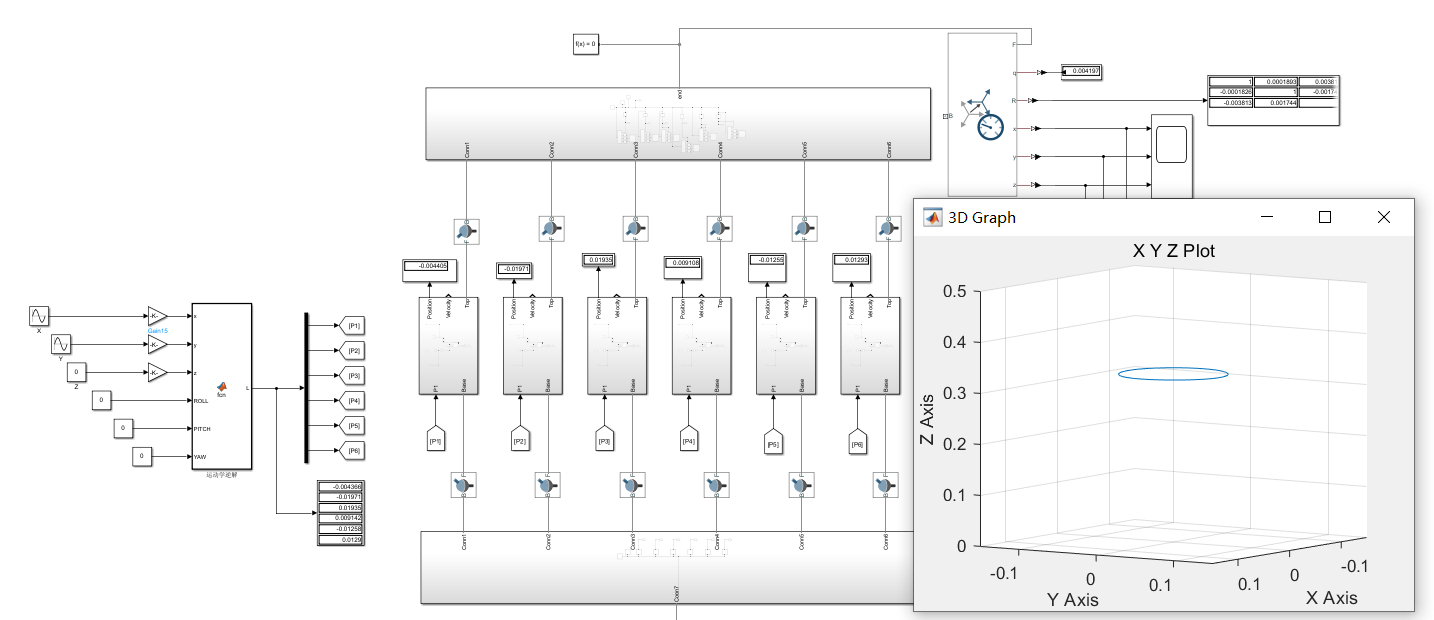
最后在Simulink里搭个混合仿真模型,核心是这个定制S-Function:
function sys = mdlDerivatives(~, ~, x, u, params)
q = x(1:6); % 关节位置
dq = x(7:12); % 关节速度
F = inverse_dynamics(q, dq, u); % 输入力
ddq = forward_dynamics(q, dq, F);
sys = [dq; ddq]; % 状态导数
end这动力学闭环能跑出0.5ms的步长,配合Simscape的物理引擎做联合仿真,效果比纯数值解更贴近真实。记得把求解器换成ode15s,刚性系统用这个稳。
搞完这些再拿个轨迹规划验证下,比如螺旋上升轨迹:
t = 0:0.01:10;
z = 0.2 * sin(2*pi*t) + 0.1*t;
pitch = 0.1 * sin(pi*t);
traj = [zeros(size(t)); zeros(size(t)); z; zeros(size(t)); pitch; zeros(size(t))]';跑起来能看到平台既升降又俯仰,这时候盯着支腿长度变化曲线,要是有突变赶紧查雅可比矩阵是不是算劈叉了。仿真这玩意儿就是个反复试错的过程,哪次要是一次跑通反而心里发毛。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)