气动驱动软体机器人仿真分析:基于Abaqus的探索
本课程基于Abaqus,应用两种加载方式一-FluidCavity与Pressure分别介绍了气动驱动软体机器人仿真分析流程。 该软体机器人涉及两种材料,主变形部分选用超弹性材料,应用Yeoh本构定义材料属性;限制层部分定义为线弹性材料。 此外,对结果的后处理进行了简要介绍。 想学轮胎充气、气囊充气、各种充气分析都能用
最近学习了一个超有意思的课程,基于Abaqus平台,深入探讨了气动驱动软体机器人的仿真分析流程,今天就来和大家分享分享。
加载方式:开启仿真的钥匙
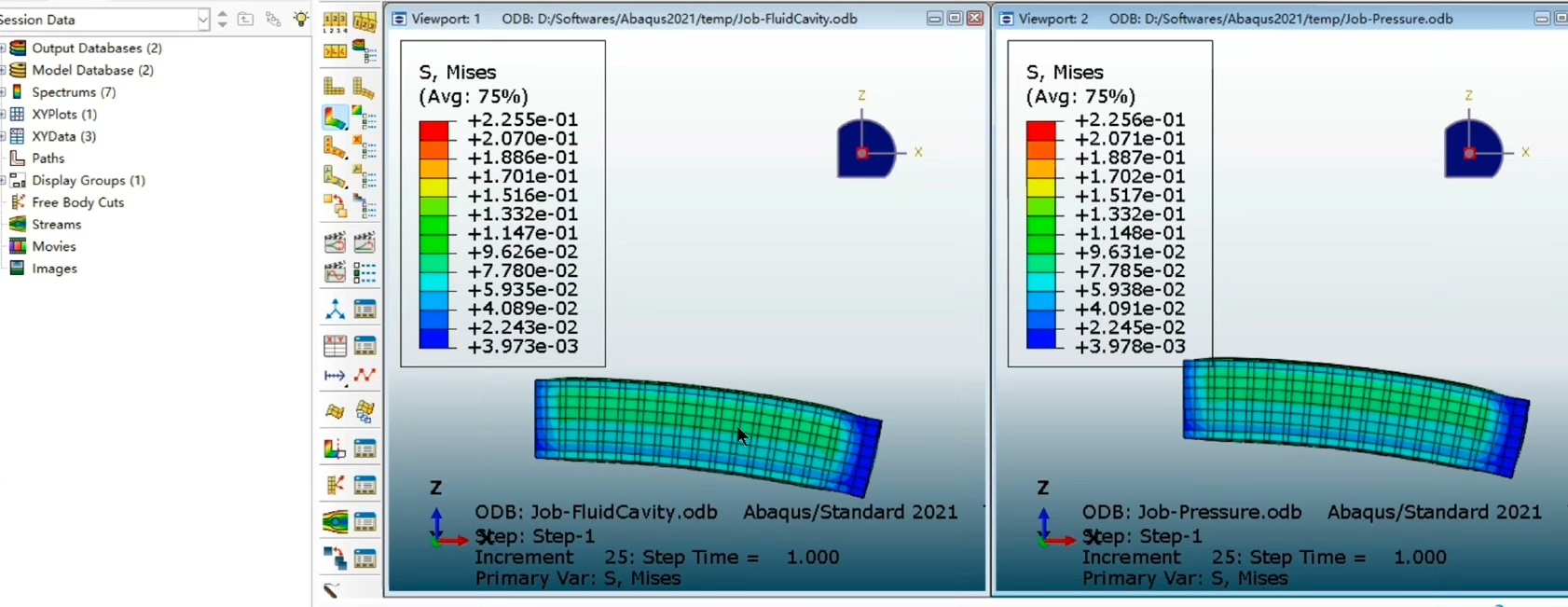
课程里应用了两种加载方式,分别是FluidCavity和Pressure。
FluidCavity
这种加载方式就像是给软体机器人创造了一个充满流体的“小世界”。在Abaqus中,通过相关的命令来设置FluidCavity的参数。比如:
# 假设使用Python脚本与Abaqus交互(简化示意)
from abaqus import *
from abaqusConstants import *
# 创建一个FluidCavity实例
myFluidCavity = mdb.models['Model-1'].FluidCavity(
name='Fluid-Cavity-1',
region=region,
distributionType=UNIFORM,
magnitude=100)这里的magnitude参数设置了流体腔内的压力大小,通过改变这个值,可以模拟不同压力条件下软体机器人的变形情况。它适用于模拟类似轮胎充气、气囊充气这类场景,就好像真实地往一个封闭空间里注入流体一样。
Pressure
Pressure加载方式则更为直接,直接在模型表面施加压力。同样在Abaqus脚本中可以这样实现:
from abaqus import *
from abaqusConstants import *
# 在模型表面施加压力
mySurface = mdb.models['Model-1'].rootAssembly.instances['Part-1-1'].surfaces['Surf-1']
mdb.models['Model-1'].Pressure(
name='Pressure-1',
createStepName='Initial',
region=mySurface,
magnitude=50)这里的magnitude设置了压力大小,mySurface指定了施加压力的表面。这种方式在一些需要精确控制表面压力的充气分析场景中非常实用。
材料属性:赋予机器人“个性”
这个软体机器人可不是单一材料构成的,涉及两种材料。
主变形部分选用超弹性材料,使用Yeoh本构来定义材料属性。Yeoh本构能很好地描述超弹性材料在大变形下的力学行为。在Abaqus中,通过材料定义模块来设置Yeoh本构参数:
# 定义超弹性Yeoh材料
mdb.models['Model-1'].Material(name='Hyperelastic-Material')
mdb.models['Model-1'].materials['Hyperelastic-Material'].Hyperelastic(
constitutiveModel=YEOH,
coefficients=(0.1, 0.01))这里的coefficients参数是Yeoh本构的系数,通过调整这些系数,可以模拟不同特性的超弹性材料。
本课程基于Abaqus,应用两种加载方式一-FluidCavity与Pressure分别介绍了气动驱动软体机器人仿真分析流程。 该软体机器人涉及两种材料,主变形部分选用超弹性材料,应用Yeoh本构定义材料属性;限制层部分定义为线弹性材料。 此外,对结果的后处理进行了简要介绍。 想学轮胎充气、气囊充气、各种充气分析都能用
限制层部分定义为线弹性材料,这部分相对简单:
# 定义线弹性材料
mdb.models['Model-1'].Material(name='Linear-Elastic-Material')
mdb.models['Model-1'].materials['Linear-Elastic-Material'].Elastic(table=((1000, 0.3), ))这里1000是弹性模量,0.3是泊松比,线弹性材料在小变形下遵循胡克定律,这样的参数设置能满足限制层的力学需求。
后处理:从数据到洞察
课程最后还对结果的后处理进行了简要介绍。后处理是将仿真得到的一堆数据转化为我们能直观理解的信息的关键步骤。比如通过Abaqus的后处理模块,可以查看软体机器人在不同加载阶段的变形云图,了解应力集中区域。通过这些分析,我们就能判断在实际充气过程中,机器人哪个部位可能会先出现问题,从而优化设计。
如果你对轮胎充气、气囊充气或者各种充气分析感兴趣,这一套基于Abaqus的流程真的非常值得学习,它能帮助你更深入地理解充气过程中的力学行为和变形规律。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)