人工肌肉在软体机器人中的最新进展
交互式软体机器人中人工肌肉的最新进展
引言
天然肌肉具有显著的特性,包括≈0.35 MPa的大应力、应变超过≈20%的高顺应性、323 W kg–1的高峰值输出功率、在数十亿次重复收缩周期中表现出优异的机械稳定性,以及利用可再生生物燃料能量实现高效率(≈40%)。使人工肌肉能够重现类似功能,甚至在某些方面超越天然肌肉,是人工肌肉发展及其在实际应用中部署的主要目标。传统的电磁电机和内燃机驱动技术一直是驱动机器人和假肢装置的主要方式。尽管它们能够提供卓越的能量输出(例如喷气发动机可达 ≈10 kW kg–1)并具备优良的机械稳定性,但其刚性、笨重和沉重的结构限制了实现灵巧形状的能力、柔性结构、轻质和小占地空间在智能交互式软体机器人中的应用。模仿天然肌肉功能的柔性驱动技术的发展正面临迫切需求。尽管在实现与天然肌肉各方面相媲美的类肌性能方面仍存在挑战,人工肌肉已在某些特定性能上超越了天然肌肉。
例如,介电弹性体驱动器(DEA)能够产生>300%的应变;热响应卷绕聚合物纤维可实现27.1 kW kg–1的显著比功率,是天然肌肉峰值输出功率的84倍;加压流体致动器执行器可以被编程以转变为复杂的三维纹理并模仿天然石头和植物;具有小特征尺寸的软磁致动器可提供游泳、潜水、行走、跳跃和爬行等多种运动模式。这些人工肌肉领域的最新进展将被重点介绍,以启发未来人工肌肉发展的方法与策略。
迄今为止,人们还开发了许多其他有趣的机制来实现人工肌肉。例如,液晶聚合物在外界刺激下改变分子排列以产生可逆宏观驱动;化学机械驱动器可响应湿度、酸、碱和溶剂等化学刺激而改变形状;基于电化学反应或静电力的碳纳米管(CNT)肌肉;以及利用渗透压或掺入的活性材料工作的水凝胶驱动器(刘等人最近提供了关于水凝胶机器的综述)。尽管本文不涵盖这些器件,但在马登等人、麦克雷肯等人、海恩斯等人以及米尔瓦基里和亨特的文章中可以找到关于不同类型软致动器的更全面的综述。
尽管最初对人工肌肉的研究主要集中在提升软致动器的机械性能,但近年来明显转向集成柔性功能电子器件,包括能够感知应变、压力和温度等外部刺激的传感器件,以及能够向用户提供发光表面、颜色变化和声学输出等交互反馈的响应器件,从而赋予软致动器机械智能。
人工肌肉是智能交互式软体机器人系统的核心组件,具有形状变形、操作和移动性能力。在人工肌肉的开发方面,大量的研究工作基于介电弹性体致动器、气动致动器、电化学致动器、软磁致动器以及刺激响应聚合物。近期进展展示出人工肌肉具备超过天然肌肉的优异比功率输出、可编程和可重构的灵巧形状变形行为,以及能够穿越带有障碍物和不同纹理表面的高机动性。本文对近年来推动人工肌肉取得重要进展的材料与策略进行了简明而关键的总结,并在此基础上探讨了将柔性电子器件与人工肌肉集成以实现智能交互式软体机器人系统的激动人心的机遇。
人工肌肉过去仅能实现被动形状变形,如今正积极探索在交互式人机界面、生物医学应用和假肢装置中的实际应用潜力。近年来柔性电子学的发展在解决传统电子器件的平坦刚性特性与软致动器的曲面可变形表面之间的机械失配难题方面发挥了重要作用,推动了功能电子元件与人工肌肉的集成,从而实现了具备主动感知与响应双向功能的交互式软体机器人系统。
在此基础上,我们将重点关注近年来在新材料与策略方面的代表性进展,以解决当前人工肌肉技术的局限性,特别是在人机接口中实现复杂且可编程的形状变形以获得可配置形态、在假肢装置中通过高比功率输出开发轻质结构,以及在生物医学应用中实现高机动性以在复杂非结构化环境中移动的能力。
我们根据驱动人工肌肉所耦合的能量类型,将人工肌肉分为有缆装置和无缆装置,而有缆和无束缚装置也将具有不同的目标应用,这些将在后续章节中详细讨论。最后,本文概述了将柔性功能电子器件与软致动器集成的方法,以赋予系统感知与响应能力。我们期望本进展报告能够为智能交互式软体机器人系统的重大创新和未来发展方向提供灵感并激发新思路。
带缆供电的人工肌肉
利用电力和压缩流体的人工肌肉需要通过有缆电线或流体管道将能量输入耦合到器件。其中,介电弹性体致动器、电液动力致动器、电化学致动器以及流体弹性体致动器是研究最为广泛的器件。由于具有相对较高的功率输出和高能量效率优势,带束缚装置的人工肌肉在制造业中的协作机器人系统、人机交互设备以及工业自动化等应用中更受青睐,因为在这些领域中高功率输出和高能量效率是重要考量因素。需要注意的是,可以为这些器件集成机载电源,并在系统中取消缆线,从而实现无缆应用。例如,可集成光伏阵列以利用太阳能发电,驱动无缆微型飞行器。机载电力系统可通过微型高压转换器放大电池的电压输出,以驱动DEA装置实现无缆操作。
介电弹性体致动器
介电弹性体驱动器因其简单结构和快速响应,已被广泛研究作为有前景的人工肌肉候选者。大应变输出和柔软结构。介电弹性体驱动器(DEA)的工作机制基于高电偏压下的麦克斯韦应力 $ p = \varepsilon E^2 $,其中 $ \varepsilon $ 是活性材料的介电常数,$ E $ 是施加的电场。由于DEA装置的工作机制,其工作电压通常非常高(在千伏级别),且机械输出主要为面内膨胀。需要进一步发展降低工作电压的方法,并将机械输出耦合到面外驱动。大多数活性材料由低杨氏模量的高可变形弹性体构成,例如聚丙烯酸酯、聚硅氧烷和聚氨酯,在麦克斯韦应力作用下产生大应变。弹性体的介电常数和电强度是材料选择的重要因素,因为麦克斯韦应力与弹性体的介电常数和所施加的电场成正比,而电场受限于材料的介电击穿强度。DEA装置可视为具有厚弹性介电层的小电容柔性电容器,仅需很小的电流(通常在μA范围内)即可充电并实现驱动。因此,介电弹性体执行器装置的电极无需具备高导电性,从而拓展了可变形电极的选择范围,包括碳脂、导电纳米线网络和离子导体。电极材料的拉伸性和杨氏模量变得重要,它们不应限制介电层的机械输出。
然而,如果DEA装置在高频下运行,则必须考虑电极的电阻,因为由电阻(来自电极)和电容器(来自DEA装置中的介电层)组成的电路中存在RC延迟。Keplinger等人对DEA装置的RC延迟进行了更详细的讨论。
复杂的面外驱动形状变形在自然界中广泛存在,并且在生物系统中很容易观察到。控制和编程介电弹性体器件在形状变形过程中的曲率已成为拓展其实际应用的重要课题。实现介电弹性体面外驱动的一种传统方法是使用刚性约束结构,将面内扩展转换为面外驱动。然而,刚性支架会导致器件的顺应性问题。作为一种替代方案,可以通过使用多层器件结构来实现无需刚性支架的面外驱动,如图1a所示。通过堆叠多个器件层,介电层厚度的减小可以累积,从而在电偏压下表现出显著的类肌肉收缩。最近,Clarke团队已证明,通过改变多层器件结构中的电极设计,可以调控介电材料中的电场分布,从而产生具有不同高斯曲率的三维形状变化。例如,通过从下至上堆叠具有圆形叉指电极且直径逐渐减小的多层介电弹性体,该软致动器可实现具有正高斯曲率的形状变形(图1b)。通过设计,一条介电弹性体条带可变形为具有正或负曲率的环形。

如图1c所示的电极图案。有趣的是,该方法可实现器件的可重构形状变形,这些器件由两组电极构成(图1d)。通过为不同电极组施加不同的电场偏压,可实现高斯曲率的可变组合。可以实现对器件的形状变形行为进行重新配置。人工肌肉的可重构和可编程形状变化对于在软体机器人系统中实现适应不同任务应用的机械功能至关重要。我们团队已经证明了一种通过将可折叠的乙基纤维素(EC)纸集成到介电弹性体执行器装置的器件结构中,提出了一种实现介电弹性体驱动器装置可重构三维形状变形的不同策略,该结构可在电偏压下“引导”介电弹性体执行器装置的侧向扩展,如图1e所示。在EC层中创建的单个折痕线可使介电弹性体执行器装置的形状变形从对称凸起变形转变为相对于折痕线的折叠驱动。由于乙基纤维素纸中的折痕图案易于重构,同一介电弹性体执行器装置可被重新编程以实现折叠或展开驱动(图1f)。
尽管在DEA装置中使用固体材料作为介电层已被广泛接受,但凯普林格团队的最新研究展示了一种具有液体介电材料的有前景的替代方案,可实现具有优异机械输出的离面驱动行为。在施加电场偏压时,作用于弹性体壳上的静电力(麦克斯韦应力)可与软体器件结构内封装的液体介电材料耦合,将静电力转化为液压,从而产生类肌肉驱动行为(图1g,h)。该软体类肌肉执行器可被放大以提供显著的力输出。例如,通过组合六个平面HASEL执行器,该装置能够提起一加仑水(≈4 kg,图1i)。此外,与电击穿后易形成永久性漏电通道的固体介电材料不同,液体介电材料由于击穿引起的气泡在液体材料中具有高迁移率,可通过其电自愈能力迅速恢复至绝缘状态。
相对较高的工作电压是一个主要挑战,在介电弹性体执行器的进一步开发中需要仔细解决。高电压可能引发严重的安全问题,尤其是当这些器件用于与人体接触的交互系统时。良好的器件绝缘层以及将施加电流限制在人体安全阈值以下(心室纤维性颤动阈值电流为<30 mA;产生强直性痉挛的电流阈值,可能导致天然肌肉功能无法从漏电流接触中释放,在50 Hz时为10 mA)是解决安全问题所必需的。高压操作将给系统的电源和控制电路带来额外困难。已有研究报道了有前景的解决方案来应对这些问题。例如,可采用额外的板载高压转换器,将电池提供的小电压放大为千伏范围的高压输出,从而在无需笨重的高压电源系统的情况下实现DEA装置的运行。谢氏团队最近开发了可用于驱动DEA装置的高压薄膜晶体管(HVTFTs)。这为在集成系统中对软体机器人、触觉显示器和触觉界面中的多个执行器进行单个DEA装置的寻址与控制提供了理想方案。
电液动力和电空气动力执行器
除了介电弹性体执行器,电液动力学(EHD)和电空气动力学(EAD)也是在高电压偏置下具有优异的机械性能。其基本机理是利用高电压偏置(数kV)的作用,在流体或气体介质中诱导动态运动,将电能转化为机械输出。离子拖拽现象是一种被广泛研究的高压效应,用于在介电液体中产生EHD流动。在离子拖拽过程中,通过电极间的高电压偏置在介电液体中引发电荷注入,这些电荷随后在电场作用下被加速。加速后的电荷沿路径将其动量传递给主体流体,从而在介电液体中产生流动。其他用于诱导EHD流动的机制也有报道,例如麦克斯韦压力梯度、由传导效应产生的电荷生成、以及由感应效应产生的电荷生成。与EHD过程类似,可在气体介质中生成离子,并在强电场作用下被加速。这些在强电场下被加速的离子在加速过程中可将其动量传递给气体介质,从而形成EAD流动。对于软体机器人应用而言,需要具备高顺应性和在高电压下良好电稳定性的可变形电极材料,以在EHD和EAD装置中实现稳定的电荷注入,这仍然是一个相当大的挑战。
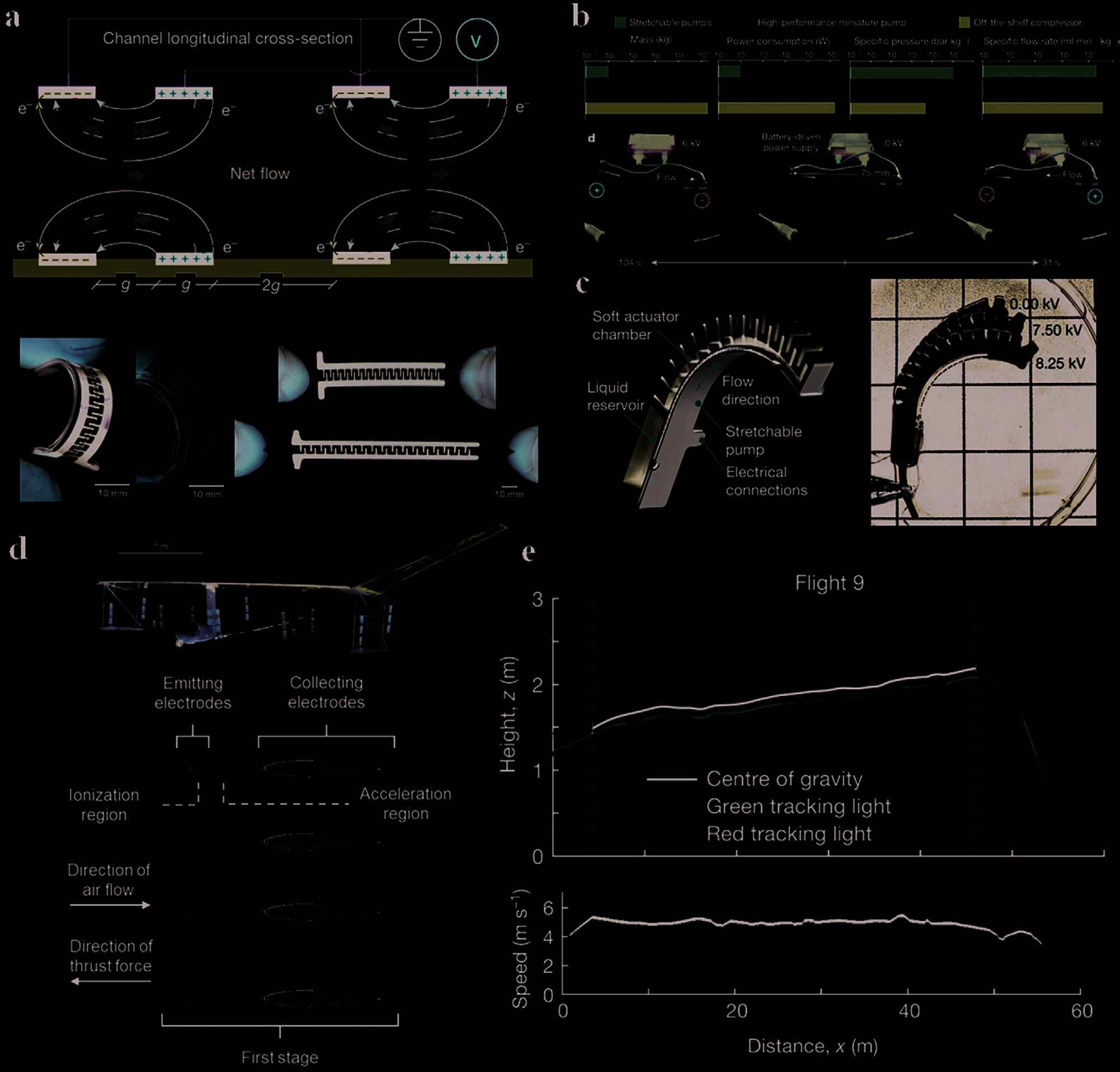
在传统的EHD致动器中,采用针状电极进行电荷注入,并使用尺寸较大的对电极来收集自由电荷。尖锐针状电极专门用于在针尖边缘聚集高密度电荷,从而易于将自由电荷注入介电液体并引发EHD流动。江村组已通过使用这种电极设计展示了机器人手和微型尺蠖机器人。然而,这种电极结构难以实现完全柔顺的器件结构。直到最近,谢氏团队通过在整体式弹性体管中嵌入可变形电极(可拉伸银墨或可拉伸炭黑/弹性体复合材料),展示了一种可拉伸EHD泵(图2a顶部图像)。该EHD泵实现了高的机械顺应性,拉伸性达到50%(图2a底部图像)。可拉伸EHD泵的机械输出非常出色,表现出与其他商用压缩机相当的比压力和比流量(图2b)。通过与弹性体腔室集成,可拉伸EHD泵可用于实现自包含式流体驱动肌肉,能够在无需外部压缩系统的情况下实现可逆弯曲驱动(图2c)。

EAD过程因其结构简单、轻质、静音操作且无需运动部件,成为航空飞行器推进系统的有前景替代方案。徐等人最近展示了一种基于EAD过程的电固态推进系统,该系统由一个非对称电极对组成(一个小电极用于空气电离,一个大电极用于离子收集,如图2d所示)。EAD发动机提供了5 N kW–1的推力‐功率比,与传统喷气发动机(3 N kW–1)相当,可在固定翼飞机上实现40–50米飞行,耗时8–9秒(图2e)。尽管所演示的装置仍基于刚性系统结构,固态EAD驱动系统展现出巨大优势。人们认为,柔性EAD驱动器的发展值得投入大量研究努力,最终可为微型和柔性航空机器人系统中的“飞行肌肉”提供关键技术。
电化学致动器
与上述讨论的器件相比,电化学致动器的工作电压要低得多,通常为低于10 V。电化学致动器的工作机理基于在电极/电解质界面和/或电极内通过双电层形成、离子嵌入/脱嵌或法拉第反应实现的可逆离子迁移。其轻质结构、低工作电压、易于制造以及良好的应变输出是使其成为柔性人工肌肉有前景候选者的关键特性。离子聚合物‐金属复合材料(IPMC)是典型的电化学致动器,由简单的器件结构组成,包括两层薄电极、离子交换膜和电解质层。该IPMC可以在1–5 V的低电压下工作。在电偏压作用下,阳离子向阴极移动,导致阴极电极周围阳离子浓度较高而产生膨胀效应,同时阳极侧出现收缩效应。因此可产生弯曲驱动,其响应时间比形状记忆合金更快,但由于受限于离子迁移速度,响应速度较介电弹性体执行器慢。关于离子聚合物‐金属复合材料驱动器的若干综合性综述可在文献中找到。
在电化学致动器大规模部署之前,其循环稳定性差和能量转换效率低的难题亟待解决。具有优异电化学循环性能且对电化学过程能产生高效结构响应的活性材料是极具前景的候选材料。近年来的研究中,大量工作致力于探索纳米材料,尤其是二维纳米材料作为电化学致动器的活性材料。纳米材料在超级电容器和电池中的应用已取得巨大成功,这直接启发了将这些材料用作电化学致动器电极的思路。二维材料具有独特的层状结构和高的比表面积,有利于在电极/电解质界面及电极内部的离子迁移。例如,静电双电层形成可在石墨烯上诱导出大应变,而向碳材料中注入电荷可导致巨大的C≡C键拉伸。然而,高的电化学电荷转移并不一定导致电化学致动器的高机械性能。研究表明,设计对电化学过程具有大结构响应的二维电极材料具有重要意义。
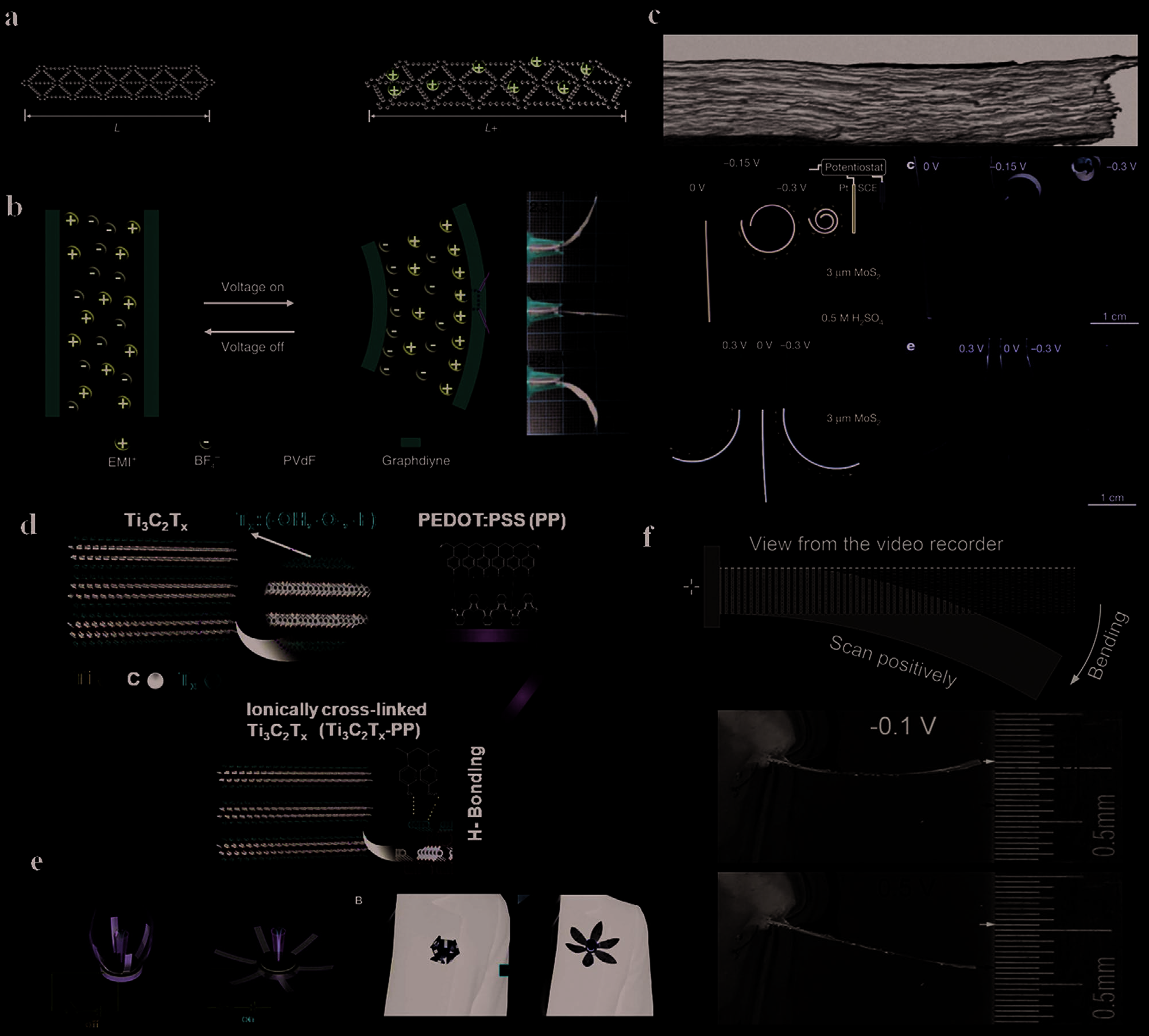
卢等人已证明石墨炔(一种二维碳同素异形体)可作为电化学致动器的电极材料。该致动器的机电效率高达 ≈6%,电化学致动器的响应频率达到0.1 至 30 Hz,考虑到与其他致动器相比,电化学致动器的效率和响应速度相对较低,这一性能表现极为出色。在电刺激作用下,石墨炔中的烯烃‐炔烃复合转变效应导致键长发生变化(图3a),从而引起电极中的宏观机械应变(图3b)。类似地,二维二硫化钼(MoS₂)纳米片中的电化学电荷可以影响原子间键及原子间距。MoS₂电化学致动器实现了非常低的工作电压,介于0.3 至 -0.3 V之间,该电压用于阳离子脱嵌与嵌入,并引发二维纳米片中的收缩和膨胀驱动(图3c)。由于MoS₂层具有较大的弹性模量(2–4 GPa),电极膜的变形使电化学致动器产生大输出力,能够举起超过电极自身重量150倍的重物。其他二维纳米材料如MXene也已成功应用于电化学致动器中,通过与聚(3,4‐乙烯二氧噻吩):聚(苯乙烯磺酸盐)(PEDOT:PSS)进行离子交联,以解决MXene在机械顺应性方面存在的困难电极(图3d)。该致动器在0.1至1伏特的低电压输入下工作,弯曲应变为≈1.37%。通过与纳菲昂电解质膜组装,该电化学致动器可制成自支撑空气工作软执行器(图3e)。具其他结构的纳米材料,例如一维纳米线,同样受到广泛关注。程等人报道了镍纳米线阵列作为活性材料,通过氧化/还原过程在纳米线中诱导应变实现电化学驱动(图3f)。该驱动可在0.6 V范围内的电压下触发,响应时间相对较快,为0.1秒。
流体弹性体执行器
与使用有线电力源工作的执行器不同,流体弹性体执行器(FEA)利用外部连接的加压流体来驱动可变形腔室,是目前发展最为成熟的类肌肉驱动技术之一。柔性执行器(FEAs)具有简单的操作机制、固有的柔顺器件结构、高机械输出(压缩空气可达≈80 J g⁻¹)以及可扩展制造等优点。Soft Robotics公司和SoftGripping等企业已推出用于制造和协作式软体机器人的商业产品。
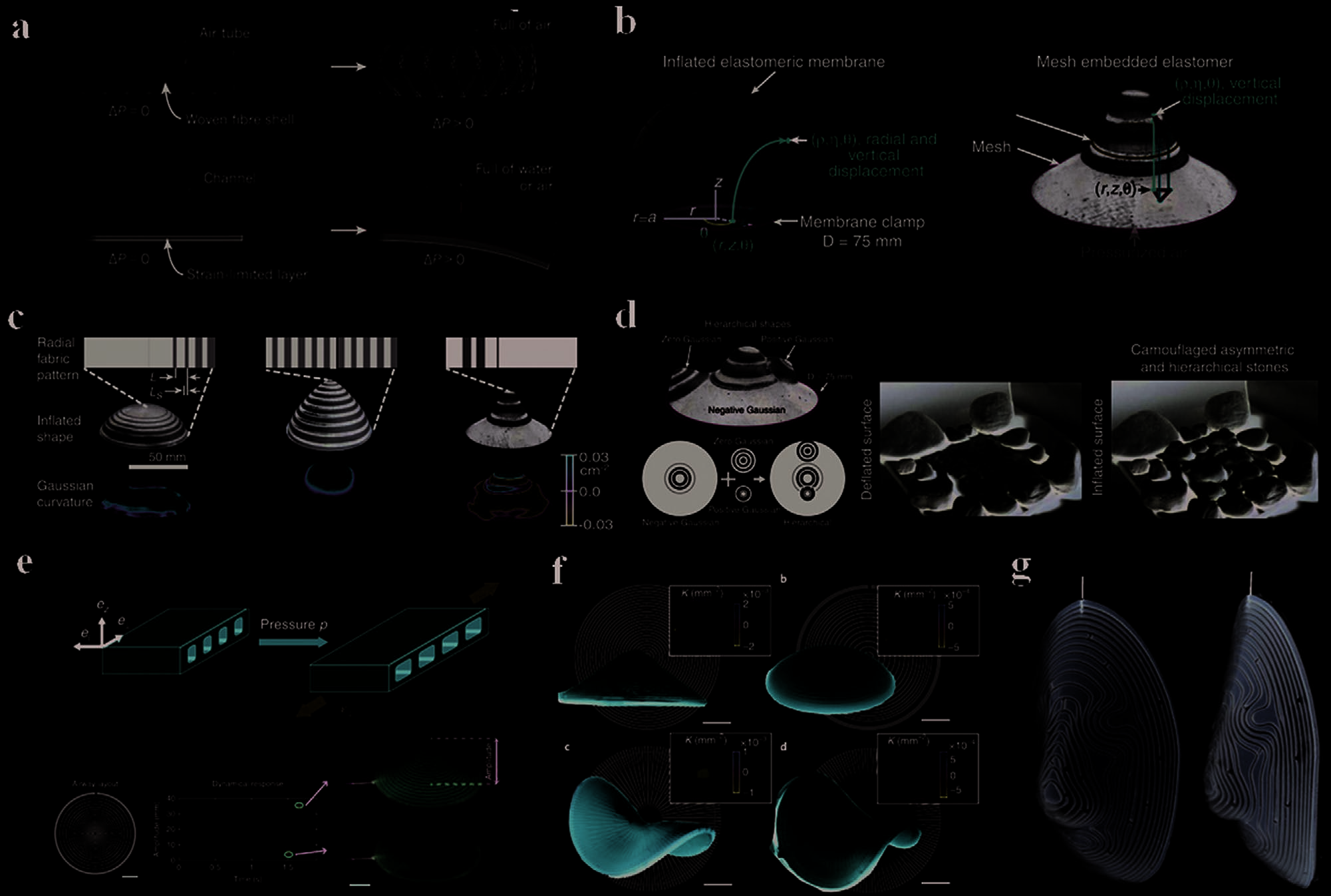
开发柔性执行器(FEAs)的努力主要集中在材料或结构设计上,以实现可控的形状变形行为。由于机械输出是由加压流体作用下材料变形产生的,因此其力学性能(包括杨氏模量、拉伸性和机械强度)是决定器件性能的重要因素。设计软流体执行器(FEAs)的策略主要基于材料方法和结构方法:材料方法依赖于在混合器件构型中使用具有不同杨氏模量的材料(图4a顶部图像),而结构方法则在弹性体腔室中创建非对称结构设计(图4a底部图像)。在材料方法中,通常采用弹性模量差异最大化的一类材料来制造柔性执行器(FEAs),例如由弹性体管和编织纤维网组成的麦基宾执行器。由于该方法的核心是通过机械约束来控制致动行为,因此利用异质材料对机械约束进行空间图案化的能力将有助于实现可编程形状变形。最近,谢泼德团队通过激光切割技术对嵌入硅酮弹性体中的纤维网进行图案化,成功实现了气动致动器中复杂的三维分层结构。不可延伸纤维网被图案化为同心环,在弹性体膜变形过程中提供周向约束,从而在压力作用下产生垂直位移。通过设计这些纤维环的图案,可在弹性体膜中实现可控的周向约束,并产生可预测的三维形状变化(图4b)。例如,通过调控径向网格的间距和尺寸,实现了具有正、零和负高斯曲率的三维形状变化(图4c)。不同的高斯曲率形状变形可被编程至单个膜中,从而实现对自然结构的重构(例如河石,图4d),并通过气动驱动实现变形。
与材料方法不同,结构方法通过在弹性体腔室中构建非对称结构来使器件发生变形,以实现目标形状变形。Roman等人通过在弹性体板中设计特定的气道通道,研制出一种称为压敏形变体(baromorph)的气动软致动器。该软致动器的工作机理基于气道通道特殊的力学性能:当通道内压力增加或减少时,通道各向异性地变形(通道长度保持不变,而宽度会发生显著变形以适应压力变化,图4e顶部图像)。在压敏形变体中图案化的径向通道网络在充气下形成了尖刺状形状变形(图4e底部图像)。通过改变气道通道的密度和几何结构,可从弹性体板实现复杂的三维形状变形,如圆锥、球体的一部分、扩展圆锥、马鞍形,甚至人脸,如图4f,g所示。
柔性执行器(FEAs)的一个关键挑战是其需要庞大的压缩系统或储液器来提供加压流体,这限制了其在完全柔顺、小型化和轻量化机器人系统发展中的实际应用。近期研究工作通过结合其他机制,使柔性执行器(FEAs)摆脱对庞大外围组件的依赖,已取得了有希望的进展。例如,Miriyev等人报道将相变材料(例如乙醇)嵌入聚合物基体(例如聚二甲基硅氧烷(PDMS)弹性体)中,以实现自包含软致动复合材料。外部加热可引发乙醇的液‐气相变,产生加压蒸汽,使复合材料在90 °C下发生变形,最大体积膨胀达 ≈900%。Mirvakili等人利用FEA腔室中的铁磁材料和液体材料,通过感应加热诱导液‐气相变。铁磁纳米颗粒在高频交变磁场下可产生显著热量,促使液体材料发生相变,从而产生高压,使FEA腔室产生20%的驱动应变和40 kJ m–3的功密度。
具有无束缚电源的人工肌肉
具有无束缚结构的人工肌肉有利于在复杂非结构化环境中实现具有高机动性的软体机器人系统。能量可以通过磁场、光、热辐射和化学物质与软致动器耦合。尽管由于能量耦合效率的限制,这些器件的功率效率通常低于带有束缚装置的器件,但它们在无束缚系统中具有广阔的应用前景,其高机动性在生物医学设备、在封闭受限空间内运行的小型机器人系统以及轻型飞行器等领域尤为重要。
磁致动器
磁致动器通过活性材料的磁化与外部磁场之间的相互作用工作。活性材料的磁化方向在外加磁场作用下对齐,从而产生机械扭矩,使器件形状发生变形。由于磁场能够直接且有效地操控器件的形状转变,磁致动器在无缆应用中受到了特别关注。磁场可穿透多种材料,并且能够实现空间可编程。这一优势对于封闭和受限空间内的应用至关重要,例如在靶向药物递送、侵入性手术和细胞操控等生物医学应用中。
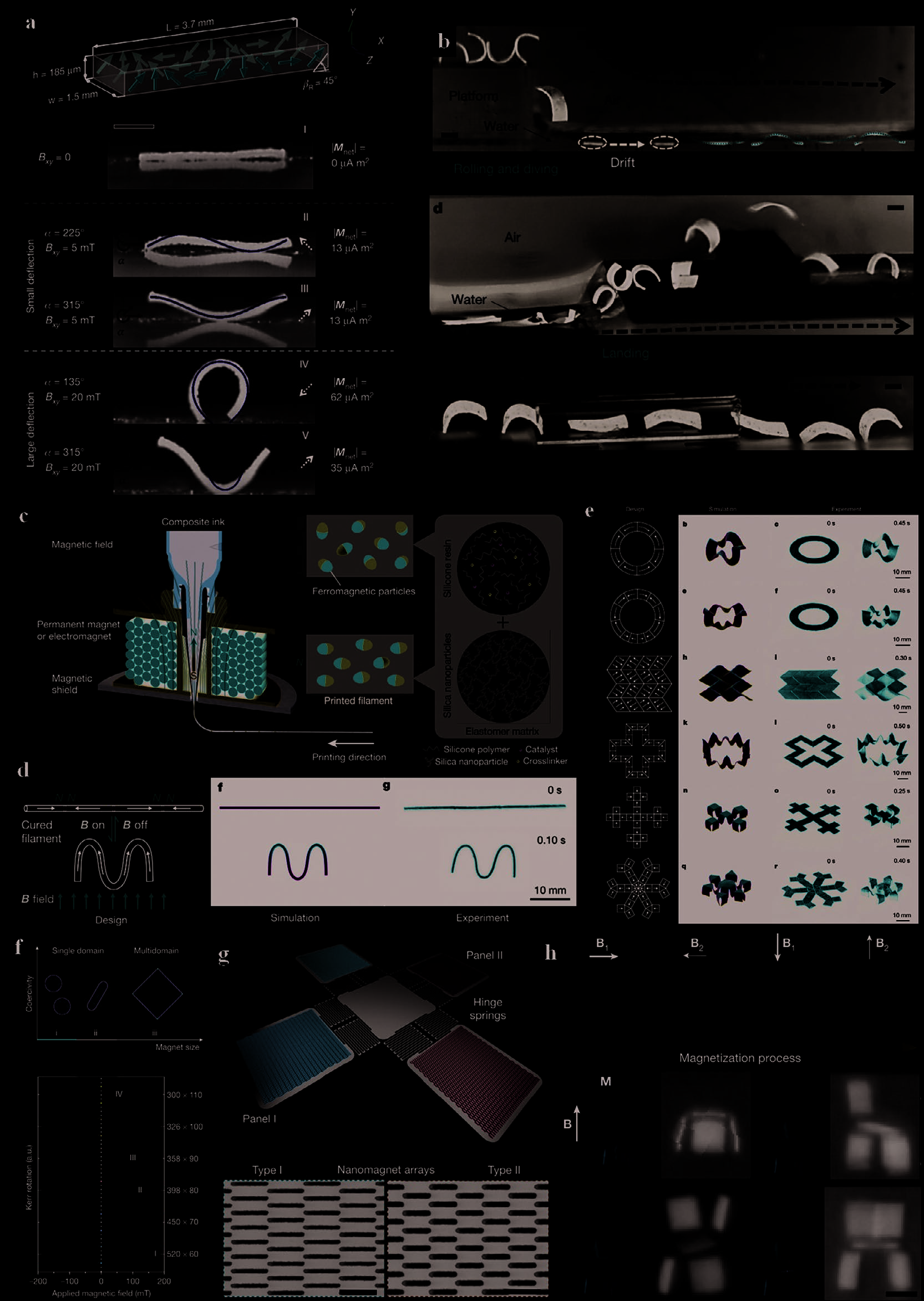
在软磁致动器中创建和编程可控磁化分布是一个核心研究课题。由于产生的磁力矩 $ \tau = m \times B $,其中 $ m $ 是磁性复合材料的磁矩,$ B $ 是施加的磁场,因此能够提供大剩磁的磁性材料至关重要。同时,还需要开发弹性体以赋予具有可编程磁化分布的磁性复合材料拉伸性。一种制造软磁致动器的简单而有效的方法是将磁性颗粒嵌入弹性体聚合物基体中,然后通过强磁场进行磁化。通过控制复合材料中的磁化梯度,可在器件中实现复杂且灵巧的形状变形行为。胡等人报道了一种在软磁致动器中创建单波长和谐磁化分布的简单方法(图5a顶部示意图),该方法是在使用大而均匀的磁场对复合材料进行磁化时,将其包裹在圆柱形玻璃棒上来实现的。复合材料的空间变化磁化与均匀磁场之间的相互作用可产生内扭矩,从而使软体机器人变形为不同形状,如图5a所示。结合时变外磁场,该软体机器人能够在曲面固体表面或水中表现出极高的机动性,实现爬行、跳跃、游泳、滚动、行走和运输物体等复杂运动模式(图5b)。
赵的研究团队展示了一种通过直接墨水书写来配置软磁颗粒/聚合物复合材料中磁化分布的不同方法。不同于传统在复合材料合成后进行的磁化过程,该方法将磁化场直接施加于打印喷嘴上,从而能够在材料打印过程中创建高度可编程的磁化分布(图5c)。通过在单根纤维中编码交替的磁化分布,可在0.1秒内在200 mT的磁场下转变为“m”形(图5d)。这种直接打印方法在磁性复合材料中编码不同的二维和三维磁化分布方面极为强大,实现了图5e中软致动器的复杂形状变形(磁性复合材料被打印成二维几何结构)。利用纳米磁体的磁开关场随其长径比变化的特性(图5f),崔等人展示了通过施加不同序列的磁化场在磁致动器中实现可重构磁化分布的能力。为了在微型机器中实现可重构磁化过程,该器件由具有不同尺寸的纳米磁体构成,这些纳米磁体具有不同的磁开关场。纳米磁体分别位于器件的不同区域(图5g),因此在施加一系列磁化场后,可在磁致动器中创建不同的磁化分布。例如,当施加一个大的磁化场 $ B_1 $ 时,所有纳米磁体将在磁化步骤中被切换。随后施加一个较低的磁场 $ B_2 $,将选择性地切换磁开关场低于 $ B_2 $ 的纳米磁体,而保持磁开关场高于 $ B_2 $ 的纳米磁体的磁化状态不变,从而在器件中创建不同的磁化分布。通过该方法,同一磁致动器可通过编码不同的磁化场序列,在磁场作用下重构以实现完全不同的形状变形行为(图5h)。
热驱动聚合物
热触发驱动已通过多种不同机制实现,包括聚合物的热膨胀、材料因热效应引起的湿度变化以及液晶聚合物、形状记忆聚合物和形状记忆合金中的相变。尽管一些研究已展示了通过电热加热诱导热效应的有线热致动器,但也有报道实现了通过直接加热、光热加热和感应加热诱导热效应的有趣无束缚装置。
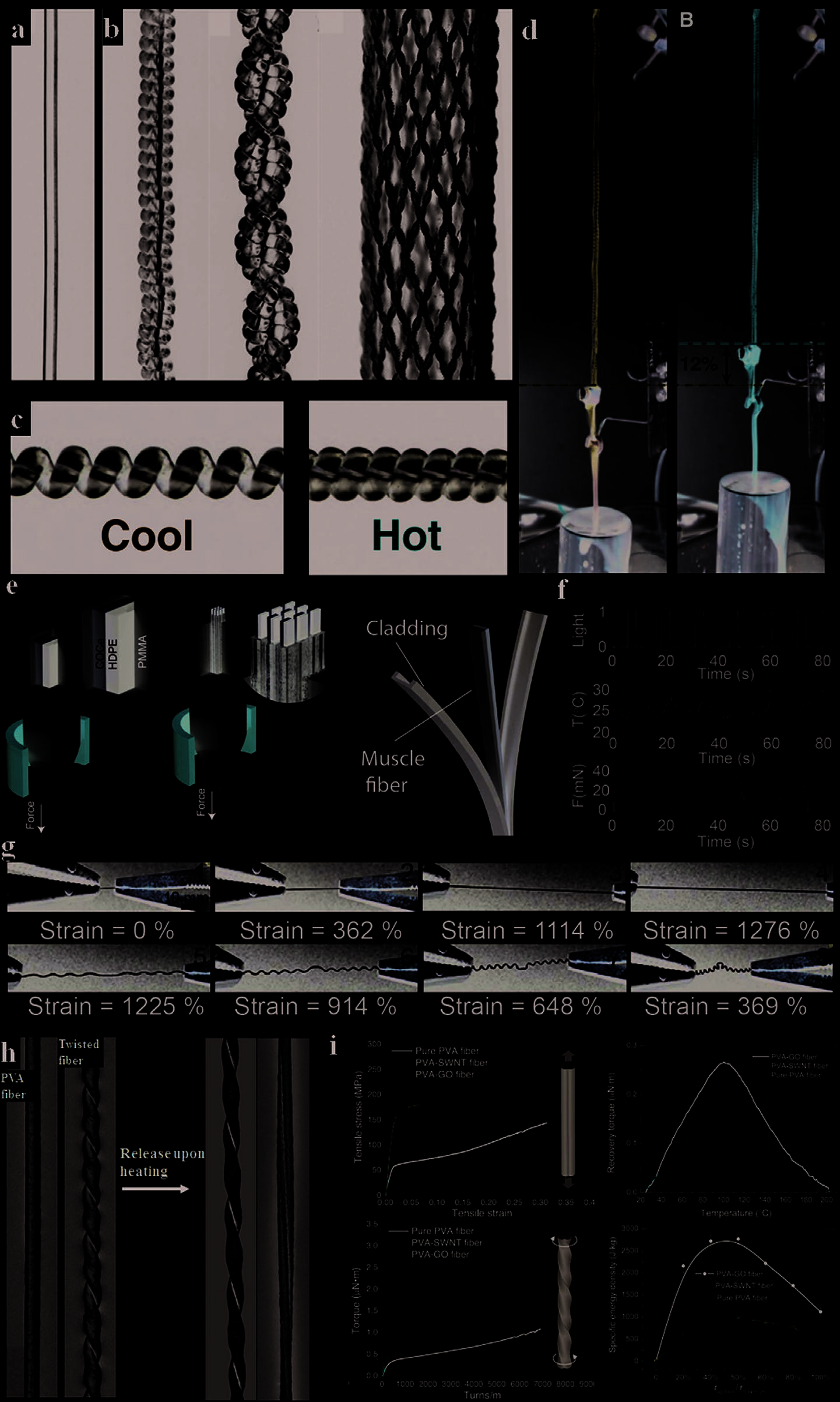
基于热驱动聚合物的人工肌肉由于其低热膨胀系数,应变一直受限于小范围。开发具有高热膨胀系数的材料体系以及能够有效增强热膨胀效应机械输出的结构,对于提升器件性能至关重要。基于高扭曲纤维的软体热致动器因其优异的机械输出性能(5.26 kW kg⁻¹,与喷气发动机的做功输出相当,是人体肌肉输出的100倍)、简单的制备方法以及使用低成本材料而受到极大关注。尽管大多数聚合物的热膨胀系数相对较小,在温度变化下难以提供大应变,但将聚合物构造成纤维结构可在热激活下实现纤维长度方向上显著的收缩。例如,尼龙6/6纤维在温度升高时可在纤维方向上产生4%的收缩,且在聚合物纤维的长度方向和径向表现出各向异性。此外,纤维结构(图6a)具有在材料中进行应变工程的优势,可显著增强机械输出。Haines等人表明,通过大幅加捻聚合物纤维以在材料中形成卷绕结构(图6b),尼龙6/6纤维在热驱动下的热收缩率可从4%提高到34%(图6c),通过在25和95°C之间切换温度,可在12%应变下提升500克的重物(图6d)。除了使用单一材料外,由具有显著不同热膨胀系数的多种材料组成的双层结构可大幅降低驱动温度。Kanik等人报道了通过热拉伸高密度聚乙烯(HDPE)和环烯烃共聚物弹性体制备双层纤维的方法(图6e,f)。该双层纤维被冷拉伸至高应变后释放。HDPE中的塑性变形诱导纤维形成扭曲弹簧结构(图6g)。该卷绕纤维在14°C的温度变化下可实现50%的线性收缩,并能提升超过自身重量650倍的物体。除热膨胀效应外,袁等人最近还展示了通过将形状记忆纳米复合纤维构造成线圈结构。聚乙烯醇(PVA)被选作活性形状记忆聚合物。通过在高于其玻璃化转变温度下加热聚乙烯醇纤维并在恒定拉伸力下加捻,从而诱导形成线圈结构。在淬火至室温后,该线圈结构仍保留在聚乙烯醇纤维中,当加热至转变温度以上时,通过解捻可释放出相当于天然骨骼肌60倍功容量的机械输出(图6h)。通过引入单壁碳纳米管或二维氧化石墨烯,可进一步提高聚乙烯醇纤维的杨氏模量,从而增强其机械输出(图6i)。
与功能器件的集成
生物系统利用其感知外部刺激并与响应性输出进行交互的能力,主动适应或与自然环境互动。而目前仍处于被动变形阶段的人工肌肉,为集成感知和响应的电子元件提供了平台,从而实现智能交互式软体机器人系统,弥合了其在与人类和环境交互中的实际应用之间的差距。这是一个令人兴奋且极具挑战性的研究领域,需要跨学科研究努力,将功能电子元件与柔软可变形的人工肌肉相结合,以模拟生物体的功能,包括感知应变、压力和温度等外部刺激的能力,以及提供发光表面、颜色变化和声学输出等响应反馈的能力。
与感知的集成
受人类皮肤感知能力的启发,为提升软体机器人在操作、移动和交互中的性能,已开展对外部刺激(特别是应变、压力和温度)的外感受研究。传统传感电子器件缺乏顺应性,限制了其与软体机器人的系统集成。柔性传感电子器件的进步为探索不同的集成方法提供了新范式。探索软致动器的自感知能力是将感知功能集成到软体机器人系统中最直接的方法,这种自感知能力可通过活性材料或器件结构的本征感知特性实现。这种方法可显著降低集成系统的复杂性,并避免不同器件之间的接口问题。例如,压阻材料可通过其电阻的变化来测量机械变形。一些用于软致动器的活性材料本身也具有压阻特性,因此这些软致动器的固有感知能力可以被利用,而无需额外集成应变传感器件。例如,一种还原石墨烯双层氧化物(RGO)和双向拉伸聚丙烯(BOPP)可同时实现大弯曲驱动和应变传感性能。驱动归因于这两种材料在光吸收和热膨胀系数上的差异,而应变传感能力则来源于压阻性RGO。类似地,通过在两个可拉伸电极之间夹入介电层,可以制备电容式应变传感器和压力传感器。通过监测器件电容的变化,可测量机械输入。介电弹性体执行器与这些传感器件具有相似的器件结构。介电弹性体驱动器可被视为一种柔软可变形电容器,其电容会因介电层在机械应变作用下的尺寸变化而改变。例如,可利用介电弹性体驱动器的自感知能力,实现兼具驱动和感知功能的机械臂。
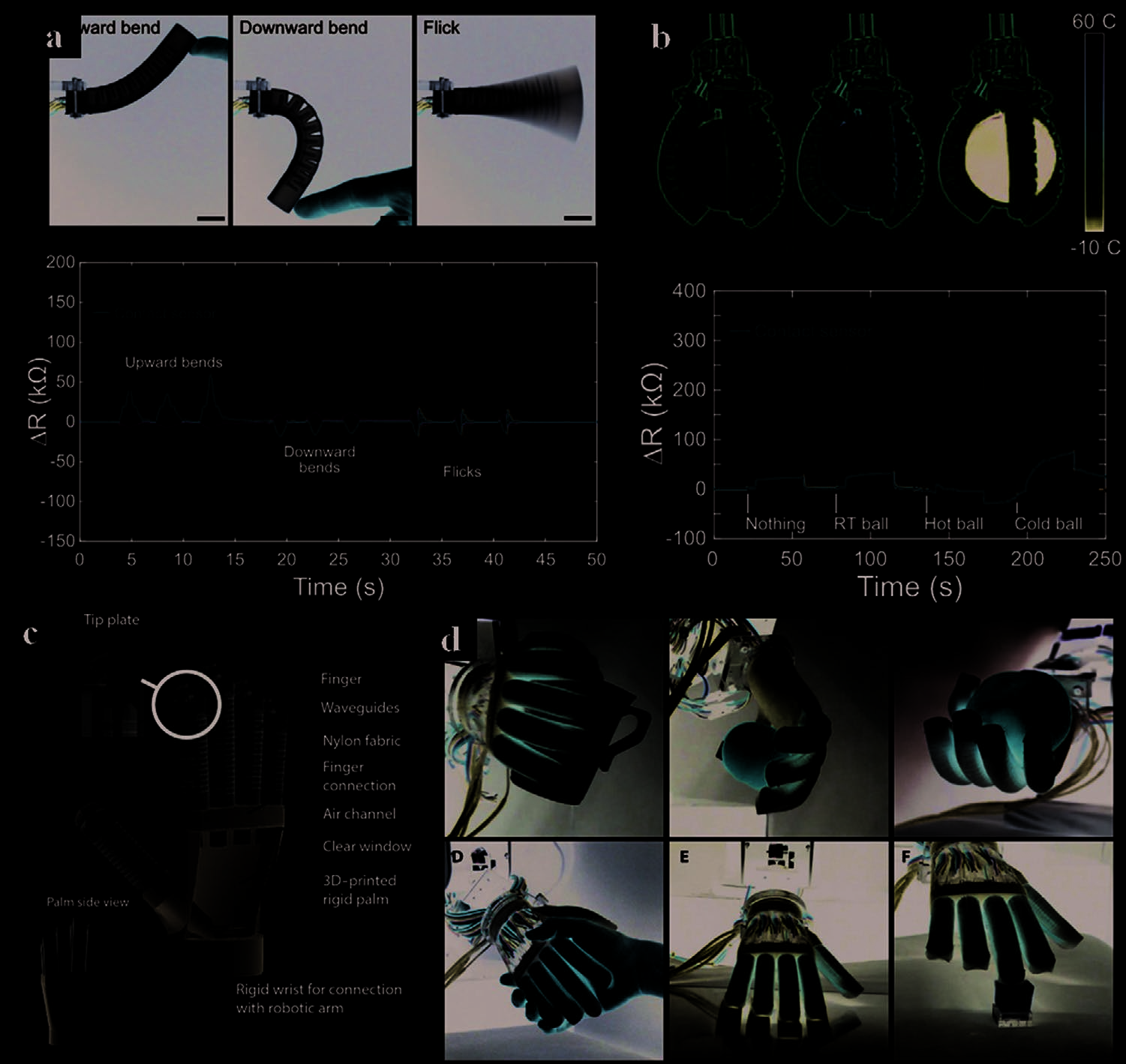
除了利用软致动器的自感知能力外,将传感器件与软致动器进行系统性集成是一种替代方法,可为系统实现更多功能。刘易斯课题组通过将可拉伸压力和温度传感器件与软体气动致动器集成,实现了能够进行触觉和温度传感的柔性本体感受驱动器。不同层的离子导电凝胶被打印到气动致动器中,从而在软驱动系统中实现触觉感知能力。利用离子凝胶的压阻特性,该器件可以根据三个不同离子凝胶传感层的信号清晰识别弯曲和轻弹等不同动作(图7a)。基于离子凝胶层在不同温度下的电导率变化,该软器件能够感知被抓取物体的温度(图7b)。赵等人报道了使用可拉伸光学波导作为假肢手中应变传感组件的方法(图7c)。该光学波导采用具有高折射率核心和低折射率包层的弹性体制造。通过测量透射光的光功率损耗,可以检测可拉伸波导上的机械变形,例如拉伸、弯曲和按压。将波导应变传感器与气动致动器集成,实现了一种软体假肢手,能够提供主动触觉感知能力以感知物体的形状和柔软度(图7d)。
与响应的集成
与使用电信号和电磁信号进行通信的电子系统相比,生物系统的通信方式大不相同。开发智能交互式软体机器人系统响应和与用户通信的方式和策略,对于促进其在真实环境中的应用至关重要。颜色变化是生物系统掌握的一种通信艺术,能够以最有效的方式传递大量信息。例如,海马通过改变其皮肤颜色来吓退捕食者并传达情绪。变色龙可以改变其颜色以融入周围环境。声学信息是另一种关键生物体用于通信的方法。受生物系统中通信方式的启发,研究人员已深入探索将颜色变化和声学输出与软致动器相结合,以实现智能交互机器人系统的有效交互与通信。
颜色变化可以通过多种方式实现,这些方式可分为发光和非发光两类。近年来,可拉伸发光器件取得了显著进展,其主要通过将传统刚性发光元件组装到弹性基底上,或通过将超薄发光器件粘附到预拉伸弹性体基底上来实现。此外,也可通过开发基于发光电化学池或交流电致发光(ACEL)材料的本征可拉伸发光材料,来实现本征可拉伸发光器件。可拉伸ACEL器件具有简单的器件结构,并在机械应变下表现出优异的发光稳定性,使其成为与软致动器集成的理想选择。我们团队通过将ACEL颗粒嵌入弹性体聚合物,并使用银纳米线网络作为透明电极。ACEL器件在机械应变下仍保持稳定的发光性能,使其能够成功集成到DEA装置中,实现一种可同时调节颜色和形态的自变形发光器件(图8a)。随后,谢泼德团队展示了将可拉伸ACEL器件集成到柔性气动执行器表面的出色工作。通过使用离子导体作为高拉伸性和透明的电极,实现ACEL器件的极高拉伸性,这对于其在高度可变形表面的柔性气动执行器上的成功集成至关重要。这些智能表面展现出主动改变形状和颜色的能力,图8b。
与发光器件不同,非发光器件利用从材料反射或透过材料的光的变化来调节其颜色。已有报道基于不同变色机制的材料,包括电致变色(EC)器件(由电化学效应引起的颜色变化)、力致变色器件(随机械变形而变色)、热致变色器件(在不同温度下变色)、以及光致变色(光照下的颜色变化)等。电致变色器件基于活性材料,这些材料可通过电化学过程改变其颜色。它们可以通过将电致变色活性材料沉积到可拉伸电极上,或通过将电致变色材料掺入电解质中来实现。在早期的一项工作中,Detsi等人展示了在纳米多孔金层上生长电致变色聚合物,该结构可在外加电场下改变形状电化学致动器。电偏压可导致纳米多孔金层在脱合金过程中发生收缩,同时通过氧化/还原过程改变电致变色聚合物的颜色。最近,Li等人利用单一功能材料WO₄₉纳米线实现了同步电致变色致动器。当电化学WO₄₉纳米线在电偏压下通过氧化/还原过程改变其颜色时,锂离子的插层/脱插层过程会引起晶格收缩/恢复,从而在双功能器件中实现宏观弯曲驱动和颜色调制(图8c)。该材料本身集成的电致变色性能和电化学驱动行为具有显著优势:无需担心不同功能器件层之间的界面问题,即可实现更好的可逆性,同时不会因增加功能器件层而导致器件厚度增大而牺牲机械输出。在众多对外部刺激(如机械变形、温度变化和光照)响应的颜色切换材料中,力致变色材料因其在机械变形下发生的化学键重排、染料聚集状态变化或光子路径长度改变而引起光学性质的变化而备受关注。就人工肌肉而言,力致变色材料因其本征柔顺性以及能够直接收集软致动器的机械变形以实现颜色调制的能力而特别引人关注。穆等人制备了SiO₂微球/PDMS复合材料作为力致变色材料,利用材料中入射光与面心立方堆叠之间夹角的变化来改变反射光的颜色。将其与蒸汽驱动驱动器集成,成功演示了一种智能变色花,能够根据周围湿度变化改变颜色和形状。最近,金等人报道了将力致变色器件与介电弹性体驱动器集成的工作。光子层由紧密排列的聚苯乙烯(PS)微珠嵌入有机凝胶中构成,可在0%和70%应变下分别实现从红色到蓝色的颜色转变。集成器件实现了对智能系统的形状和颜色进行同步动态调制。介电弹性体驱动器的驱动阶段可通过集成光子层的颜色变化被用户直接感知(图8d)。
声学输出由高频机械振动产生。因此,声音生成装置可被视为工作在高频范围内的致动器。基于电磁式、静电式和压电式的执行器通常用于产生高频振动。与变色材料不同,后者可能需要器件具有明显的特征尺寸以便用户易于感知,而传统刚性声学器件在其尺寸相对于软体机器人系统较小时,可直接集成到软体机器人系统中。然而,在小型软体机器人系统中,当其尺寸不再可忽略时,开发可拉伸声学器件的能力仍然十分必要。由于电磁式器件中的刚性磁体组件存在限制,以及压电式器件中难以开发出高顺应性的压电材料,静电扬声器已成为可变形声学输出的首选方案。例如,金等人已通过在弹性体介电材料上使用液态金属微通道作为电极,开发出一种可拉伸扬声器。此外,还展示了一种采用离子导体作为电极的可拉伸且透明的扬声器。其内在能力在于能够在高频范围内运行并产生声音,同时提供在低频范围内实现形状变形,使静电设备成为具有固有双功能特性的独特软体系统。S. 金等人通过使用结合直流偏压的低频区域信号进行形状变形,以及交流偏压的高频区域信号进行声音生成,成功实现了可拉伸介电弹性体执行器装置的运行。在同一介电弹性体执行器装置中实现了合成驱动和音频输出,如图8e所示。
结论与展望
人工肌肉是一个新兴平台,可集成多种功能电子器件以构建智能交互式柔性电子系统。实现能够复制天然肌肉显著特性的人工肌肉将为软体机器人发展提供新的动力。目前已有大量研究努力致力于推动该领域的快速发展。采用有线供电的人工肌肉已展现出优异的机械输出性能,部分器件已被开发用于商业应用,以替代传统刚性驱动系统。同时,仍需开发功能材料和设计策略,以解决人工肌肉技术中存在的性能不足问题,从而满足其在实际应用中的需求。静电执行器具有高能量效率和快速响应速度等显著优势。然而,在未来发展中,其高压操作所涉及的电气安全、电源以及高效控制电路等关键问题仍需妥善解决。电化学致动器具备低压操作能力,可作为某些特定应用中介电弹性体驱动器的替代方案。随着新兴纳米材料的应用,该领域正在快速发展。未来的研究应着力解决其相对较低的响应速度及循环稳定性问题,尤其是在需要数十亿次驱动循环的机械应用中。值得注意的是,有线软执行器也有潜力采用高密度板载电源,从而摆脱线缆和束缚装置。已有研究报道包括使用小特征尺寸的高压放大电路,可直接由电池供电,以及利用静电作用力在器件内部产生加压流体来驱动柔性执行器(FEAs)。无束缚装置在小型机器人和受限空间内的生物医学设备应用中表现出显著优势。软磁致动器在磁场控制下可实现极高机动性和灵巧运动行为。通过进一步提升器件磁化分布编程能力,并在更大空间范围内以更小的外围系统控制驱动磁场,将有望实现更多潜在应用。通过对热响应聚合物进行应变工程,可实现高功率输出,其输出水平可与喷气发动机相媲美。采用类似方法还可研究对光、湿度、酸、碱和溶剂等其他刺激响应的更灵敏聚合物,以进一步提升其性能并解决可逆性问题。
原始尝试已开展将多功能电子元件与人工肌肉平台集成。受自然启发,交互式软驱动机器人系统中类皮肤的感知性能和通信能力可更好地适应生物环境。人们相信,柔性电子器件与人工肌肉的协同开发将为实现智能交互式软体机器人系统提供强大驱动力,使其在未来能够与我们协作并进行通信。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 28
28 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)