ROS机器人操作系统平台搭建
1.1ROS 介绍
机器人操作系统(Robot Operating System,ROS),作为最优秀的机器人软件框架之一,能为异质计算机集群提供类似操作系统的功能。ROS设计成为一种分布式结构以提高机器人研发中的软件复用率,使得框架中的每个功能模块都可以被单独设计、编译,并且在运行时一松散耦合的方式结合在一起。ROS由核心通信机制、开发工具、应用功能和生态系统四个部分组成。
1.2ROS安装
ROS1.0版本目前只针对于Linux系统较为兼容,尤其在Ubuntu系统中ROS操作平台能发挥其完整的功能应用,故而通常情况下需要先对电脑主机安装Ubuntu系统作为搭载ROS的操作平台。本实验的运行环境为Ubuntu18.04(Linux系统),ROS Melodic,运行方式为虚拟机运行,ROS采用软件源安装。
1.2.1Ubuntu系统安装
VMware虚拟机软件安装,打开官网
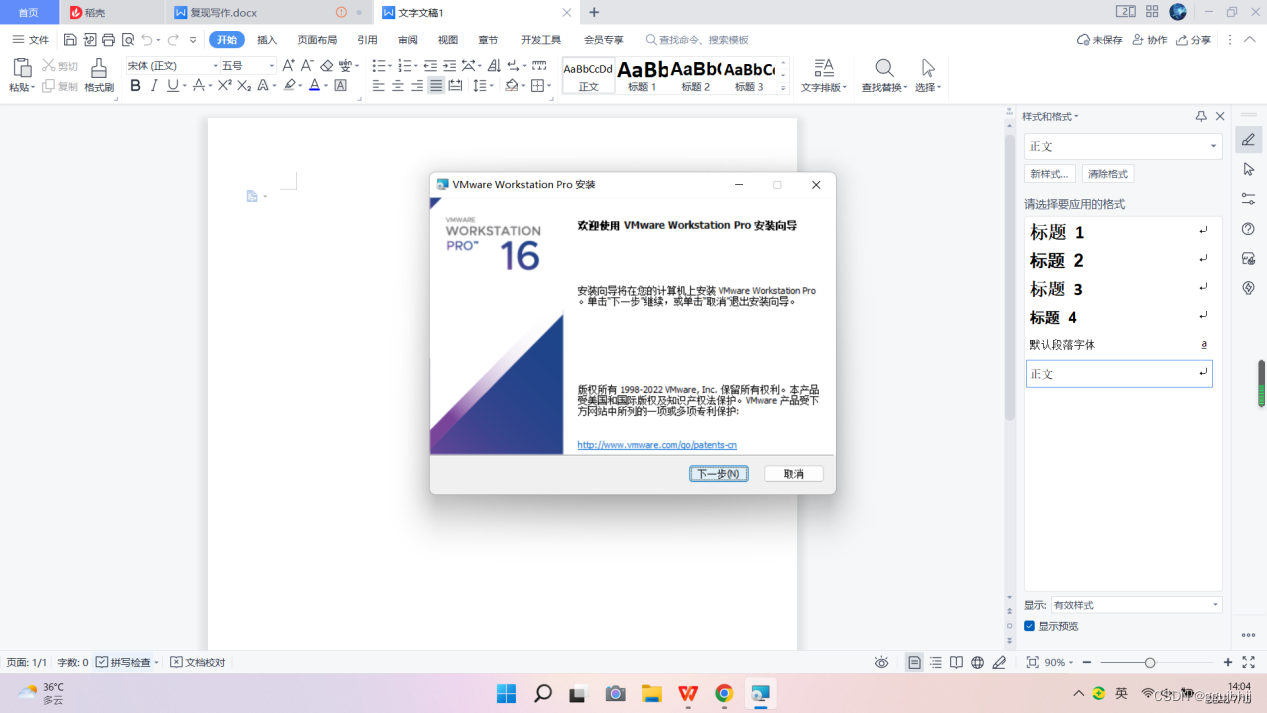
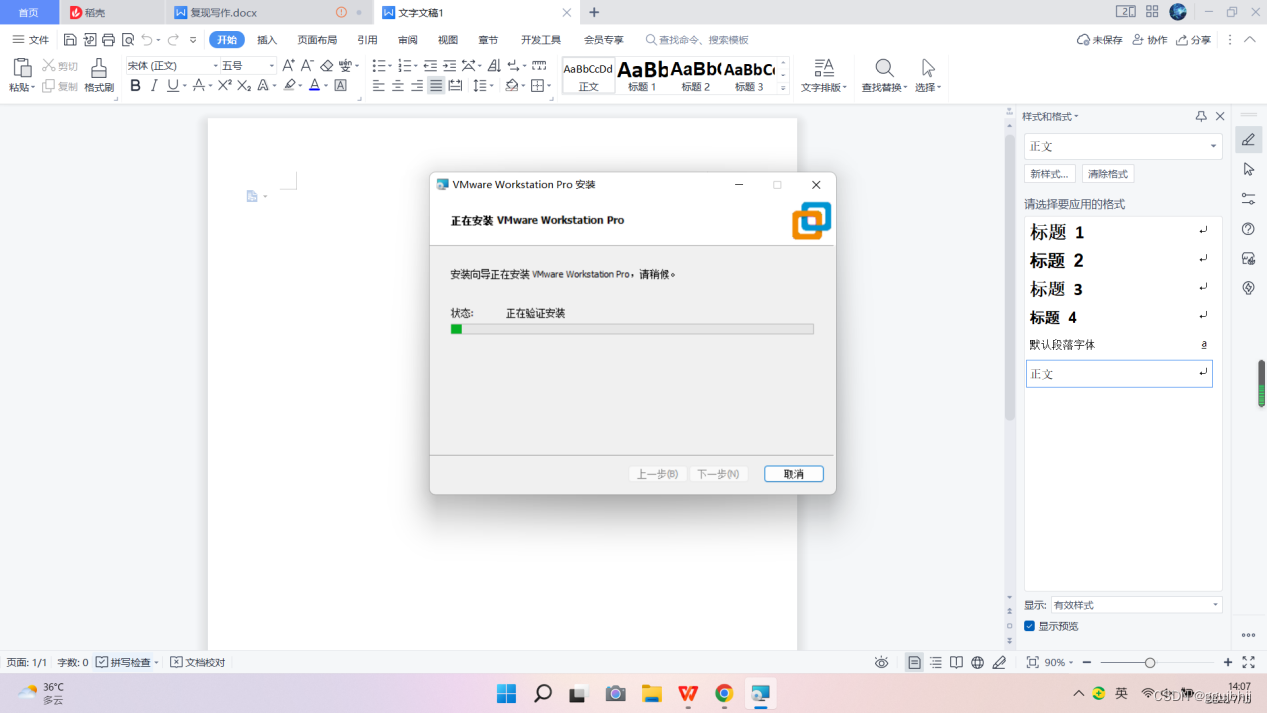
如图所示界面中点击DOWNLOAD NOW进行下载,下载完成后打开进行安装,在安装向导中选择下一步,自定义安装选择下一步,快捷方式选择下一步,用户体验设置中建议取消勾选产品更新和用户提升选项后下一步,最后点击安装等待完成,待完成后,以管理员身份启动VMware,输入版本下许可证完成安装(版权问题无法公示)。

 下载镜像,浏览器中输入
下载镜像,浏览器中输入

目前最新版本为Ubuntu 22.04,搜索寻找18.04版本点击Download进行安装。
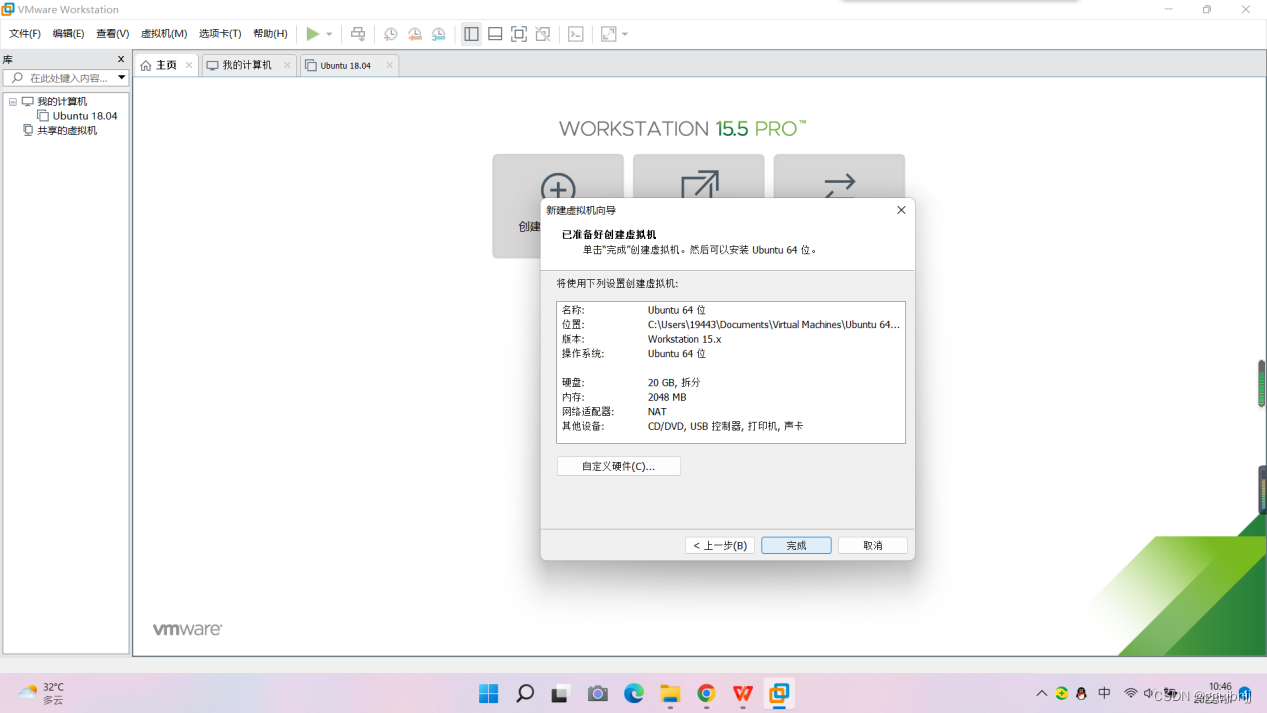
打开虚拟机,点击“创建新的虚拟机”,在虚拟机向导中选择“下一步”→“下一步”→“下一步”(选择客户机操作系统(客户机操作系统为Linux(L),版本为Ubuntu 64位))→“下一步”(命名虚拟机并更改默认位置)→“下一步”(指定磁盘容量,建议磁盘容量20GB)→“完成”。此处虚拟机安装已经基本完成,接下来进行虚拟机配置。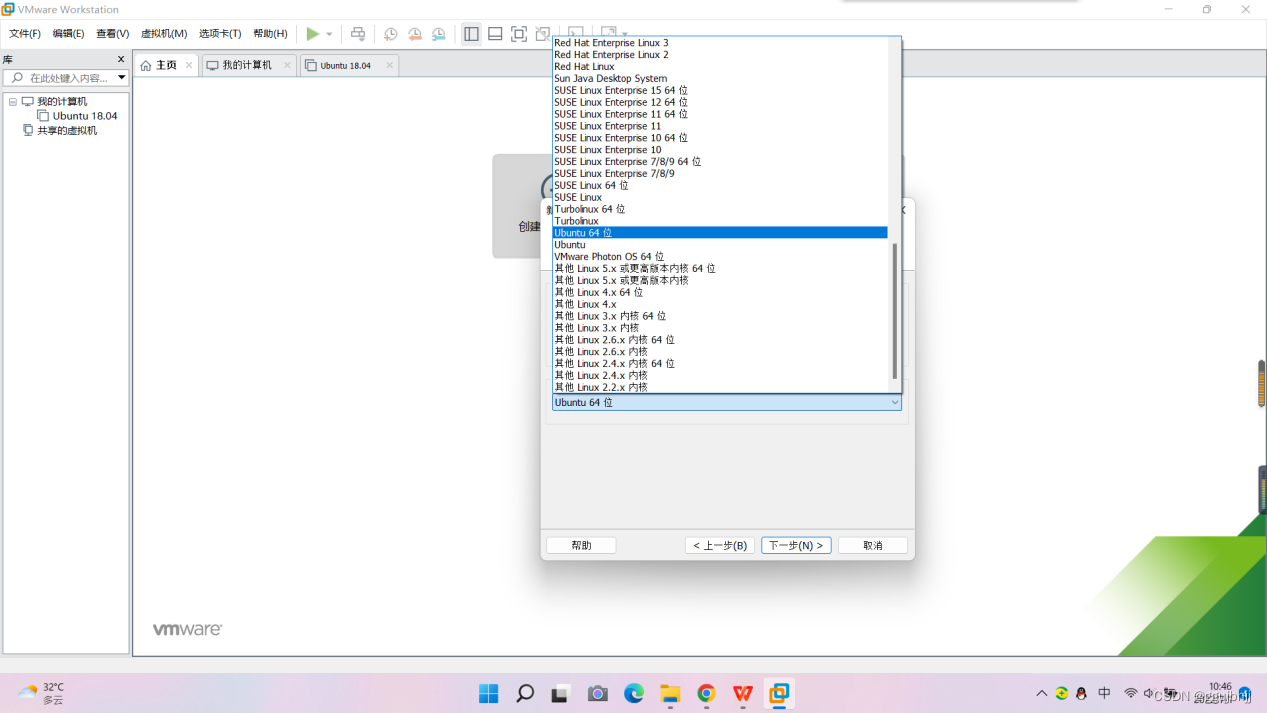
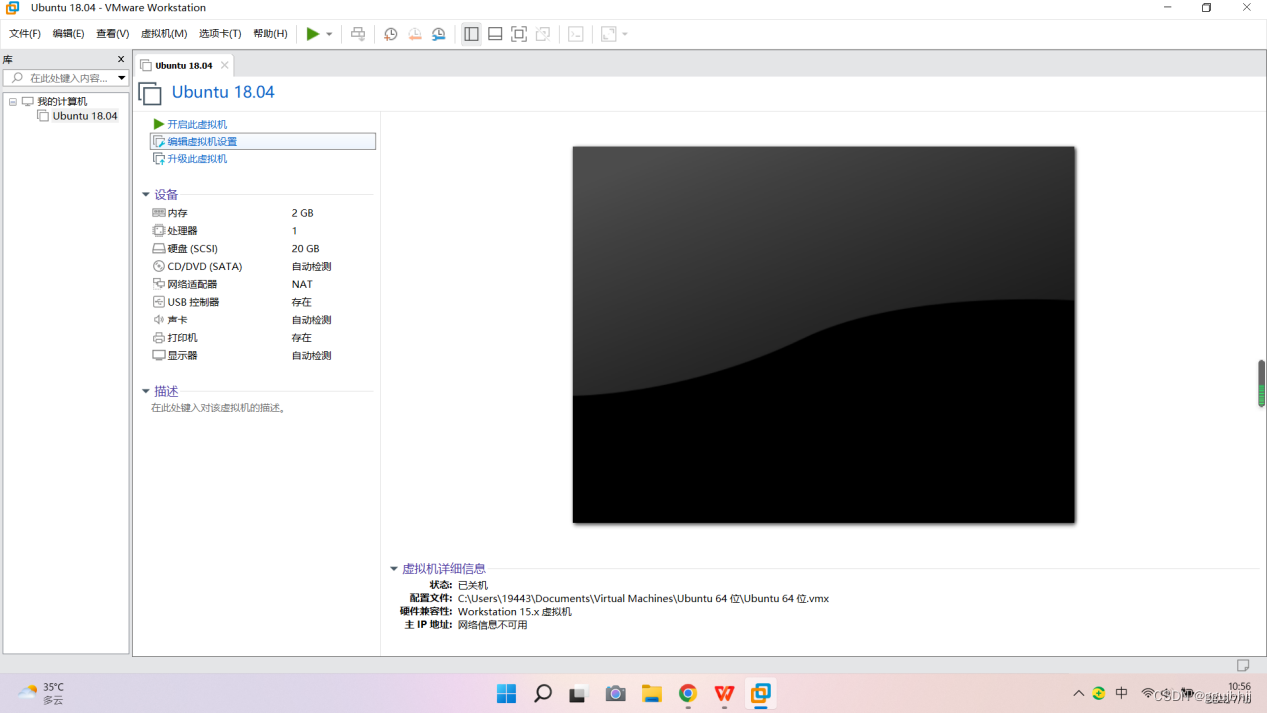
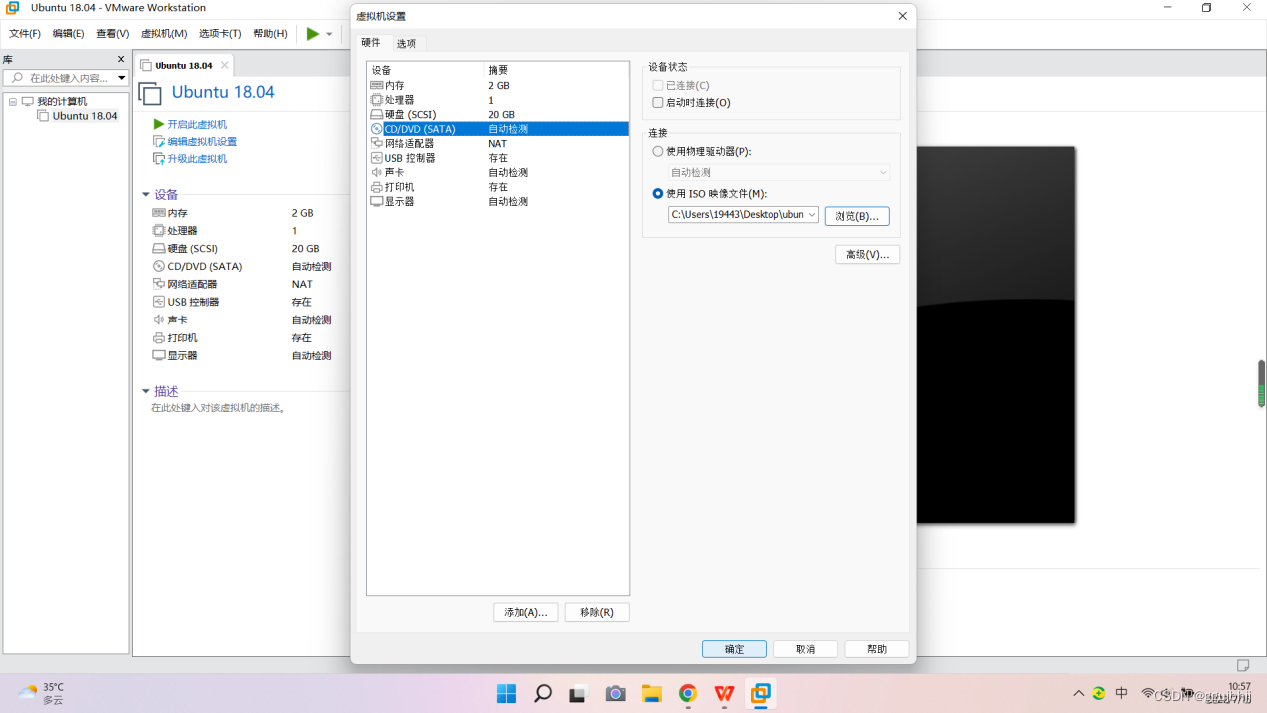
虚拟机配置, 点击编辑虚拟机设置选项,设置内存选项栏建议选用2GB,点击CD/DVD选项栏,使用ISO映像文件,选取下载过的Ubuntu18.04映像文件,点击确定完成配置。
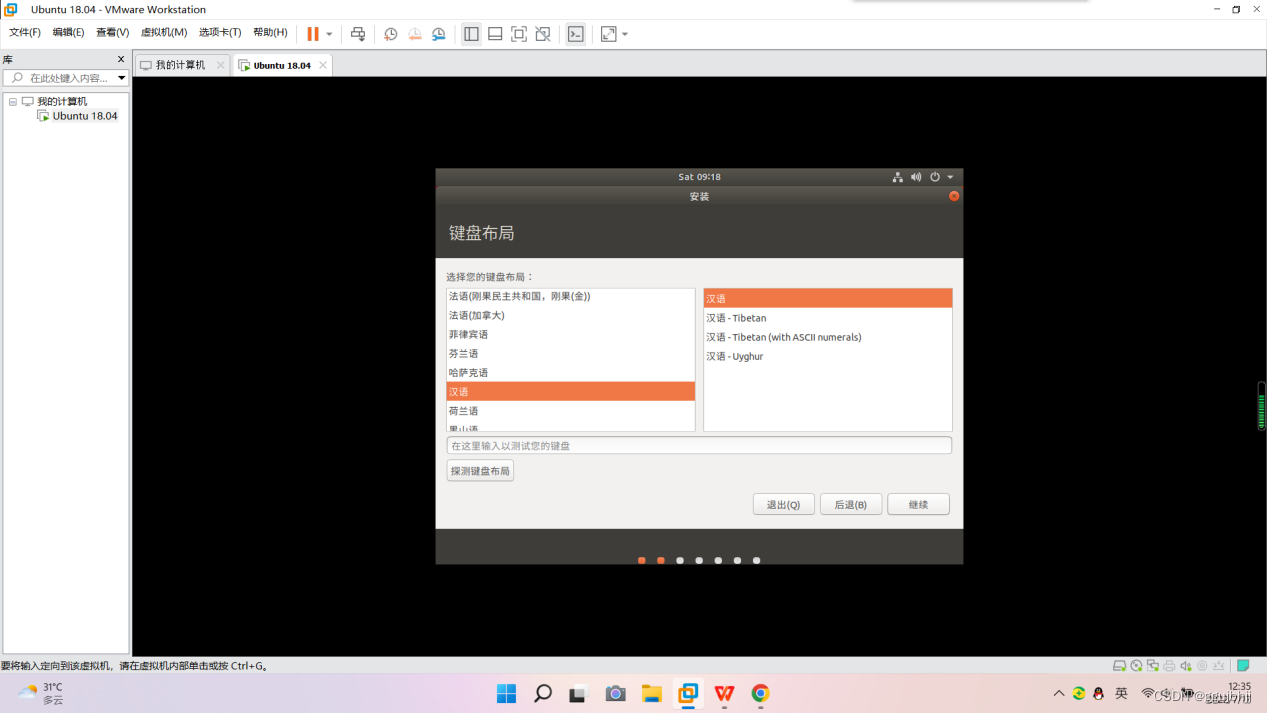
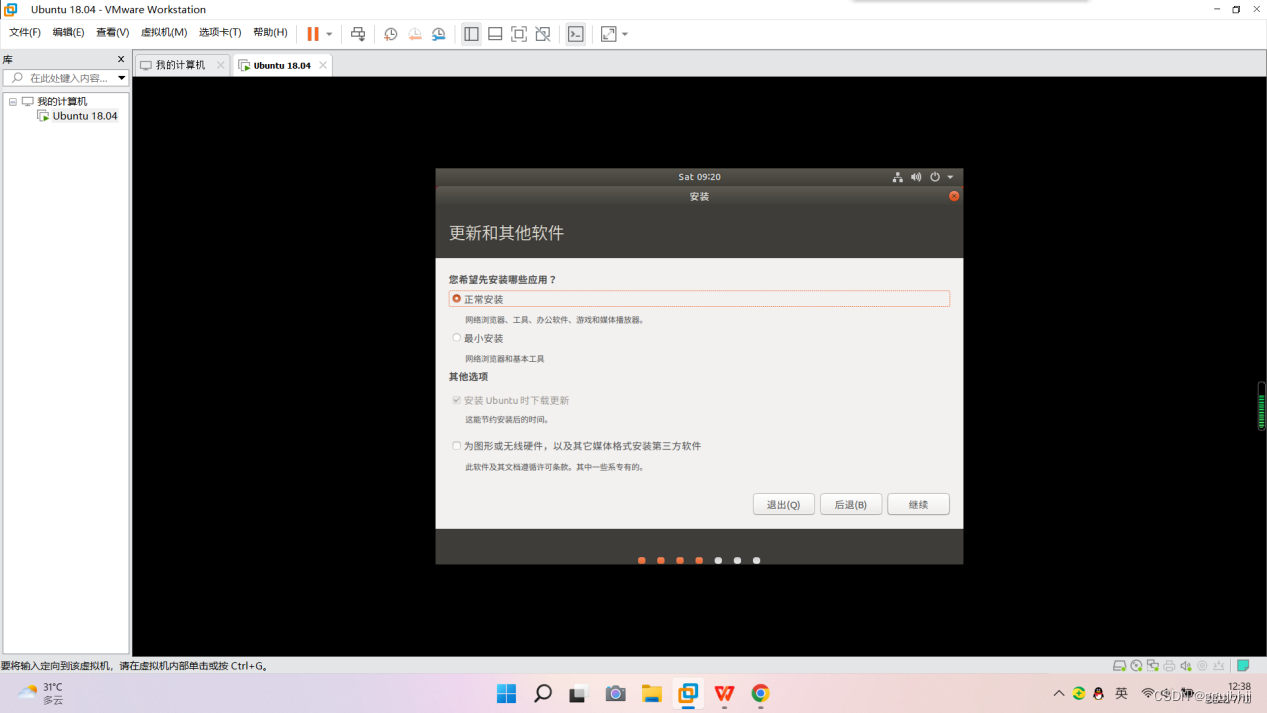
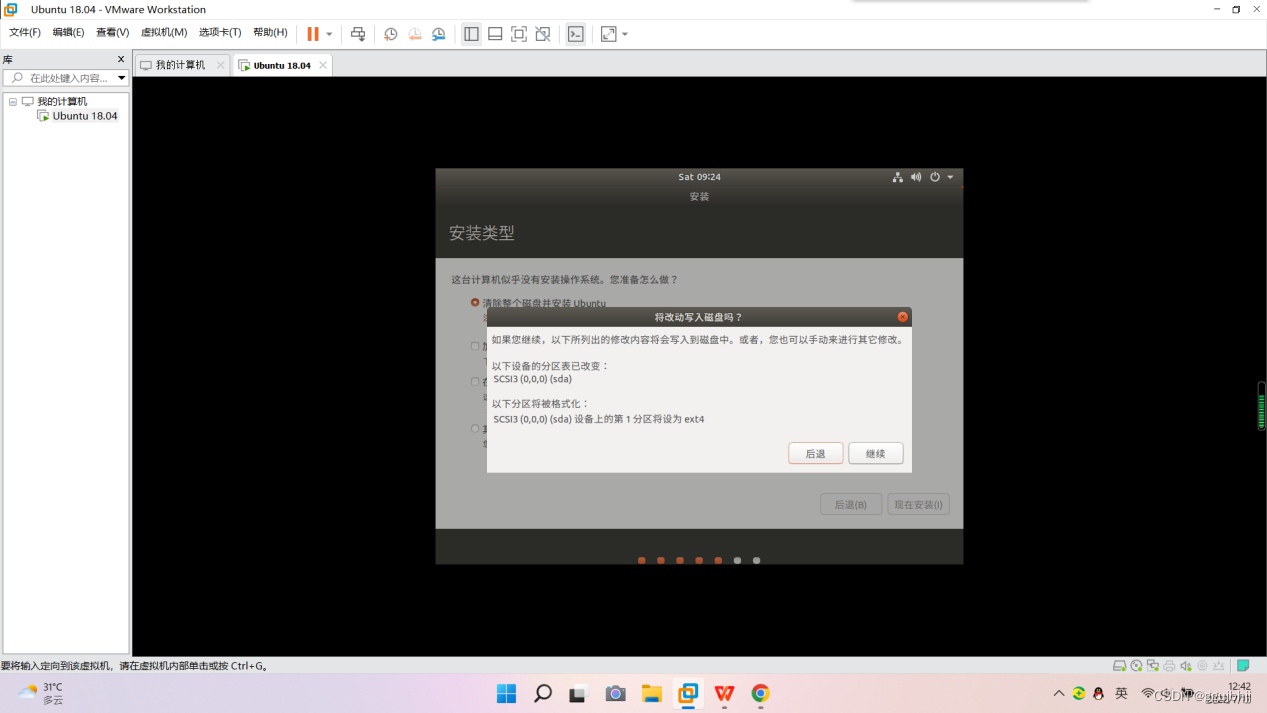
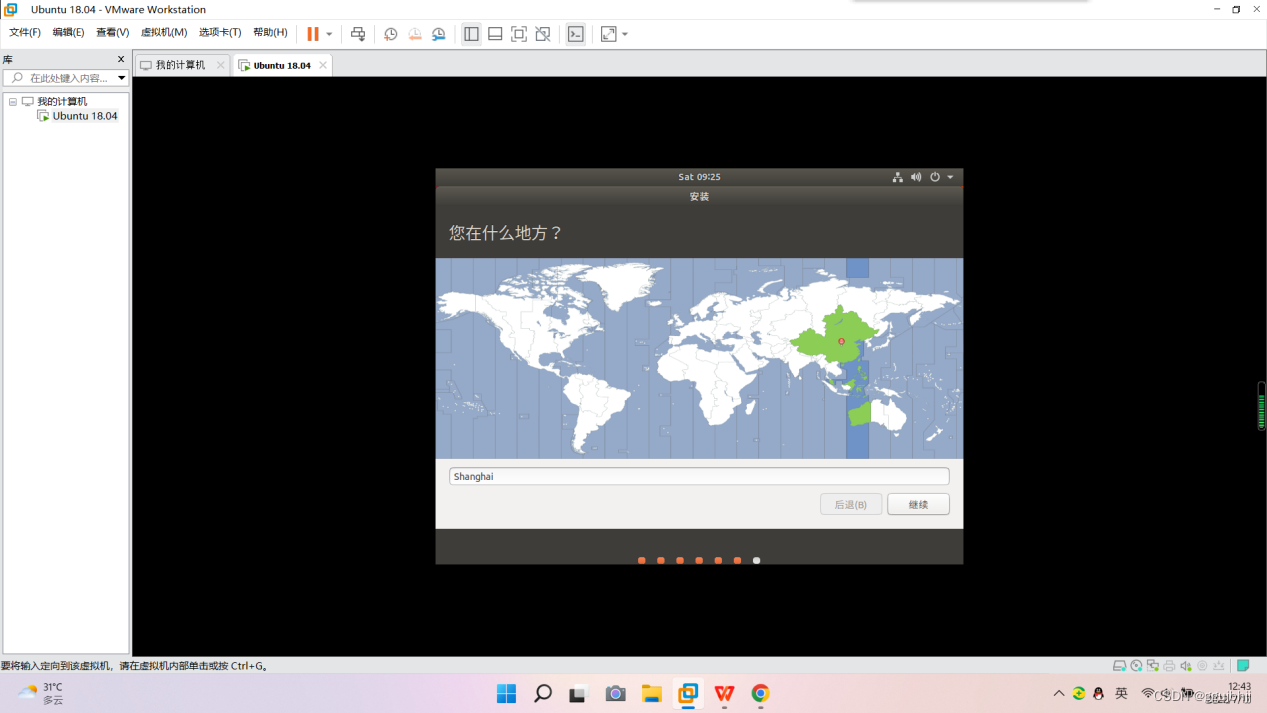
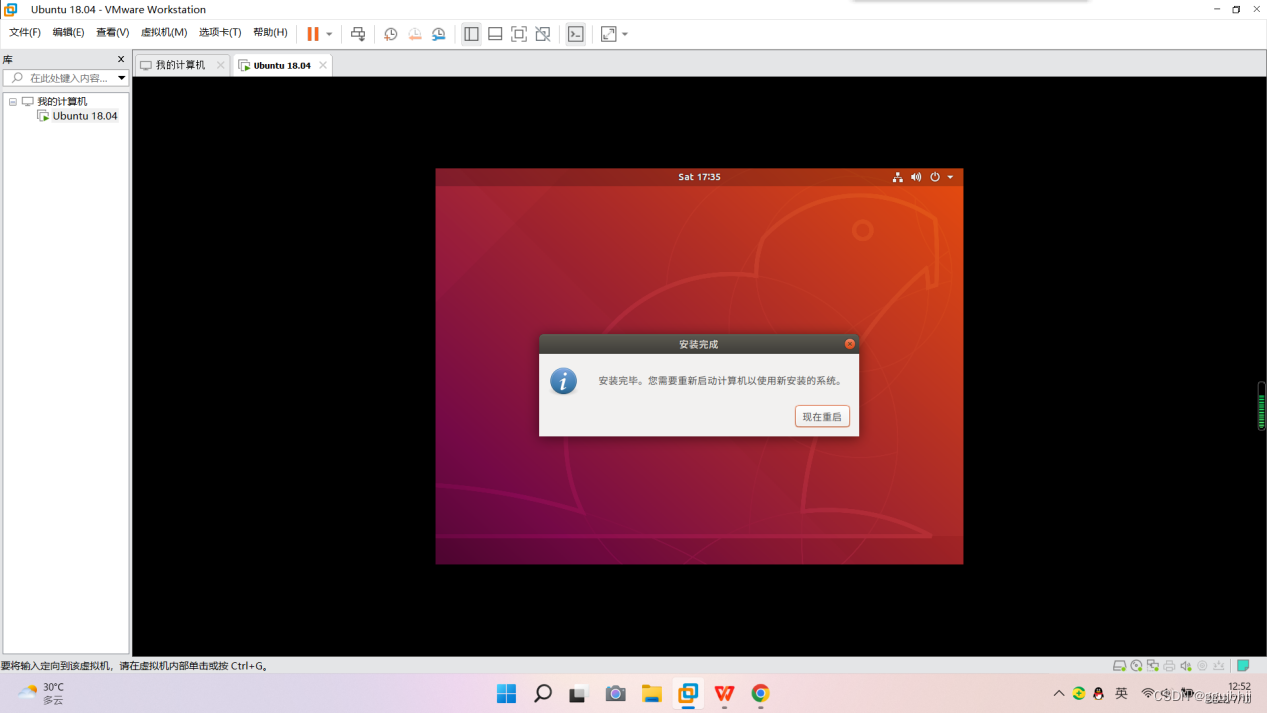
 开启此虚拟机,在弹出的第一个窗口中选择“否”,之后进入语言配置,默认为英语,也可滑动选项栏,此处选择中文简体,点击安装Ubuntu,选择默认键盘布局,继续,更新和其它软件中可是网络状况而定选择安装Ubuntu时下载更新,继续,安装类型中若为虚拟机安装可选默认“清楚整个磁盘并安装Ubuntu”,若为双系统不可选择此项,否则会连同Windows系统一同清楚磁盘,此处虚拟机安装选择默认选项,现在安装,提示对硬盘做修改,点击继续,地区选择可选默认,也可点击所在附近地区,显示“shanghai”,点击继续,设置姓名用户及密码,建议密码的设置简单一些,因为Ubuntu对系统管理比较安全,后面需要频繁使用输入,避免造成不必要的麻烦,默认登录时需要输入密码,点击继续。此时正式进入安装步骤,从选项栏可观察到安装流程,根据实际网络状况需要一定安装时间,安装完成后会弹出提示框,需要重新启动虚拟机,点击现在重启。重启过程可直接点击Enter键“remove installation medium”继续开机过程进入Ubuntu系统,点击用户输入密码登录完成启动进入界面。
开启此虚拟机,在弹出的第一个窗口中选择“否”,之后进入语言配置,默认为英语,也可滑动选项栏,此处选择中文简体,点击安装Ubuntu,选择默认键盘布局,继续,更新和其它软件中可是网络状况而定选择安装Ubuntu时下载更新,继续,安装类型中若为虚拟机安装可选默认“清楚整个磁盘并安装Ubuntu”,若为双系统不可选择此项,否则会连同Windows系统一同清楚磁盘,此处虚拟机安装选择默认选项,现在安装,提示对硬盘做修改,点击继续,地区选择可选默认,也可点击所在附近地区,显示“shanghai”,点击继续,设置姓名用户及密码,建议密码的设置简单一些,因为Ubuntu对系统管理比较安全,后面需要频繁使用输入,避免造成不必要的麻烦,默认登录时需要输入密码,点击继续。此时正式进入安装步骤,从选项栏可观察到安装流程,根据实际网络状况需要一定安装时间,安装完成后会弹出提示框,需要重新启动虚拟机,点击现在重启。重启过程可直接点击Enter键“remove installation medium”继续开机过程进入Ubuntu系统,点击用户输入密码登录完成启动进入界面。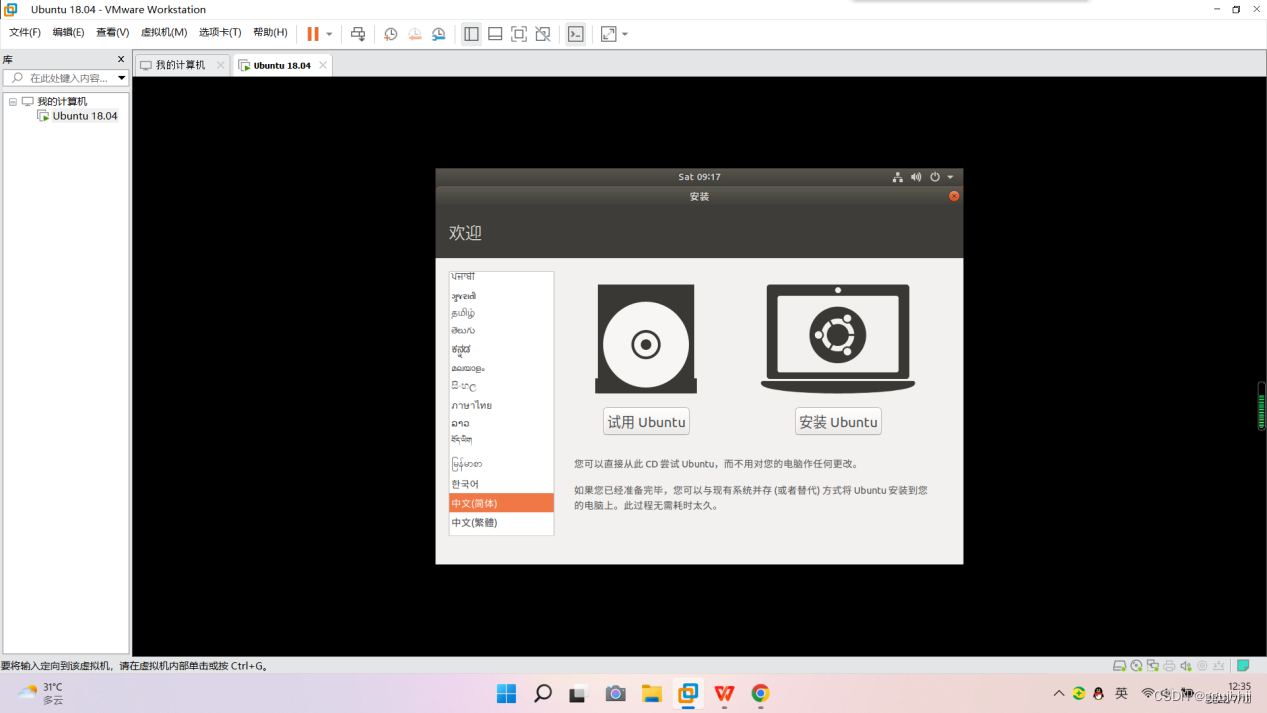

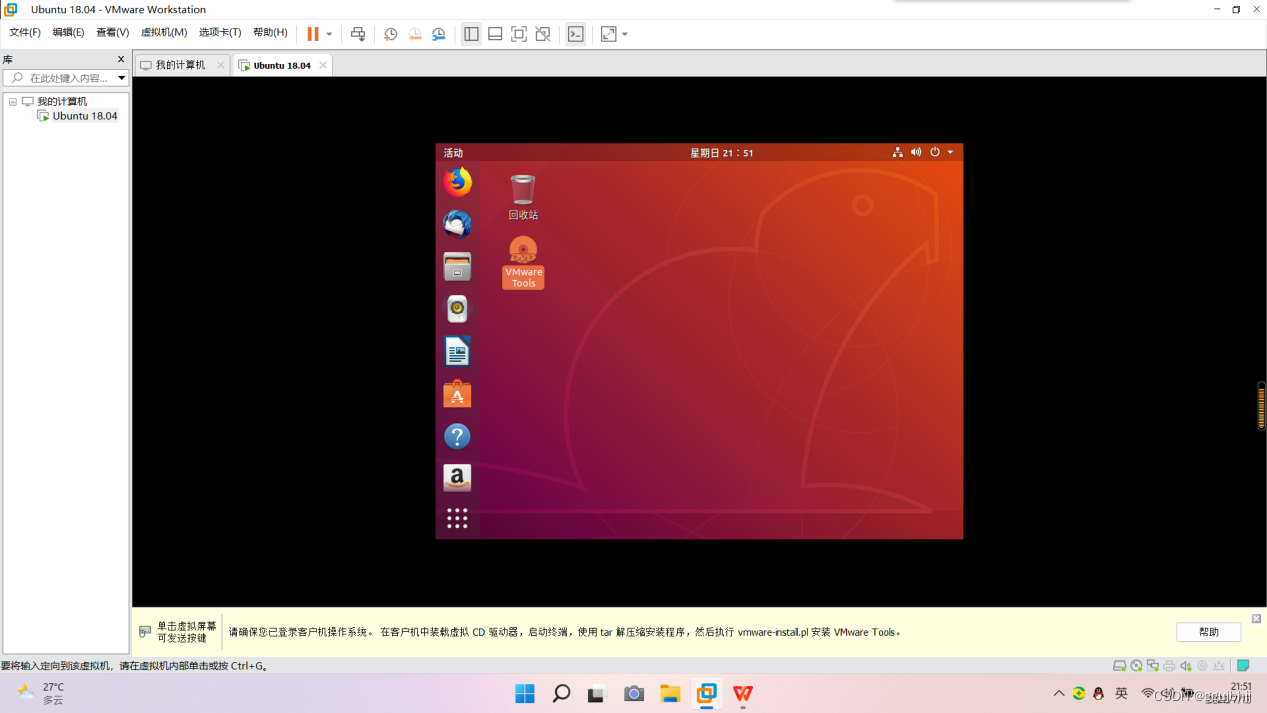
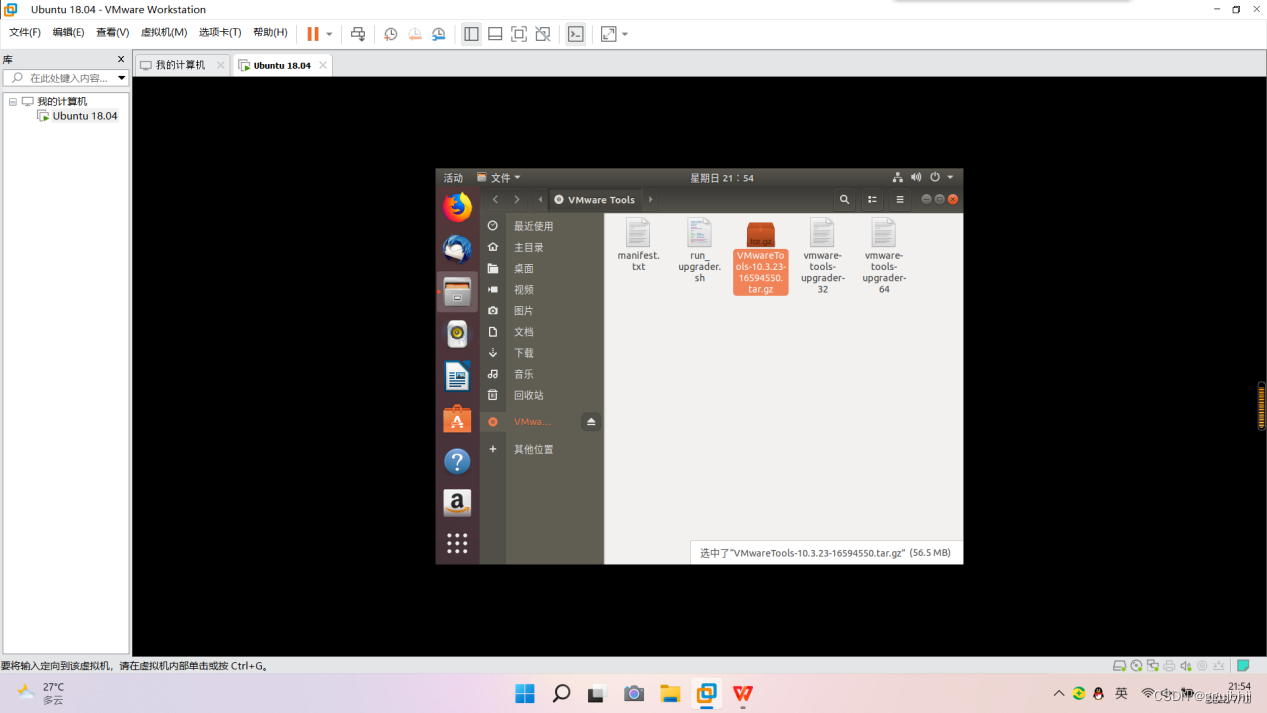
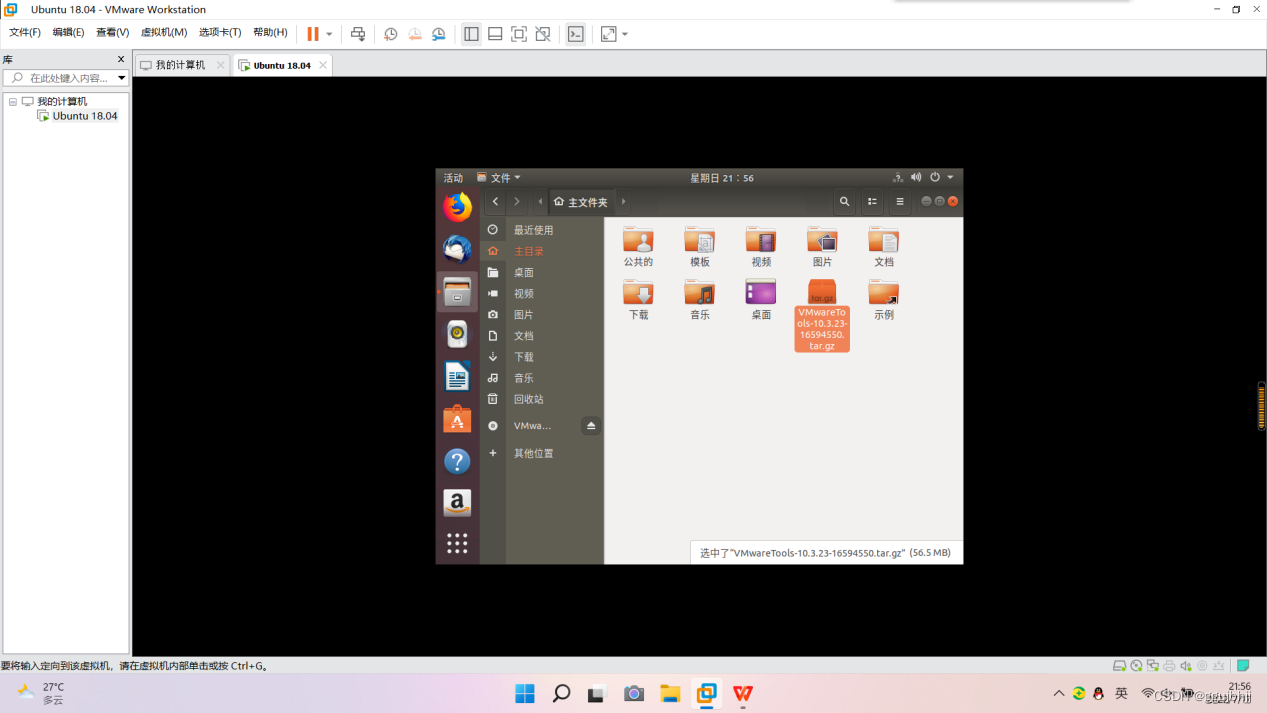
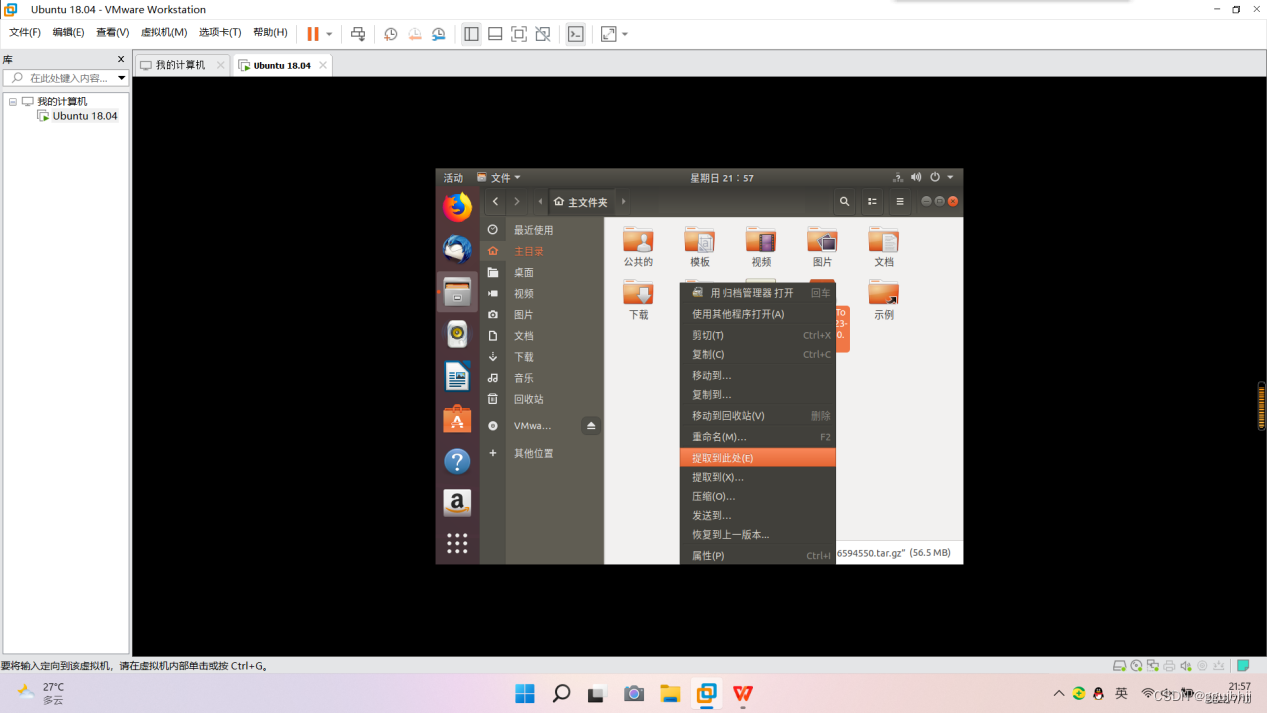
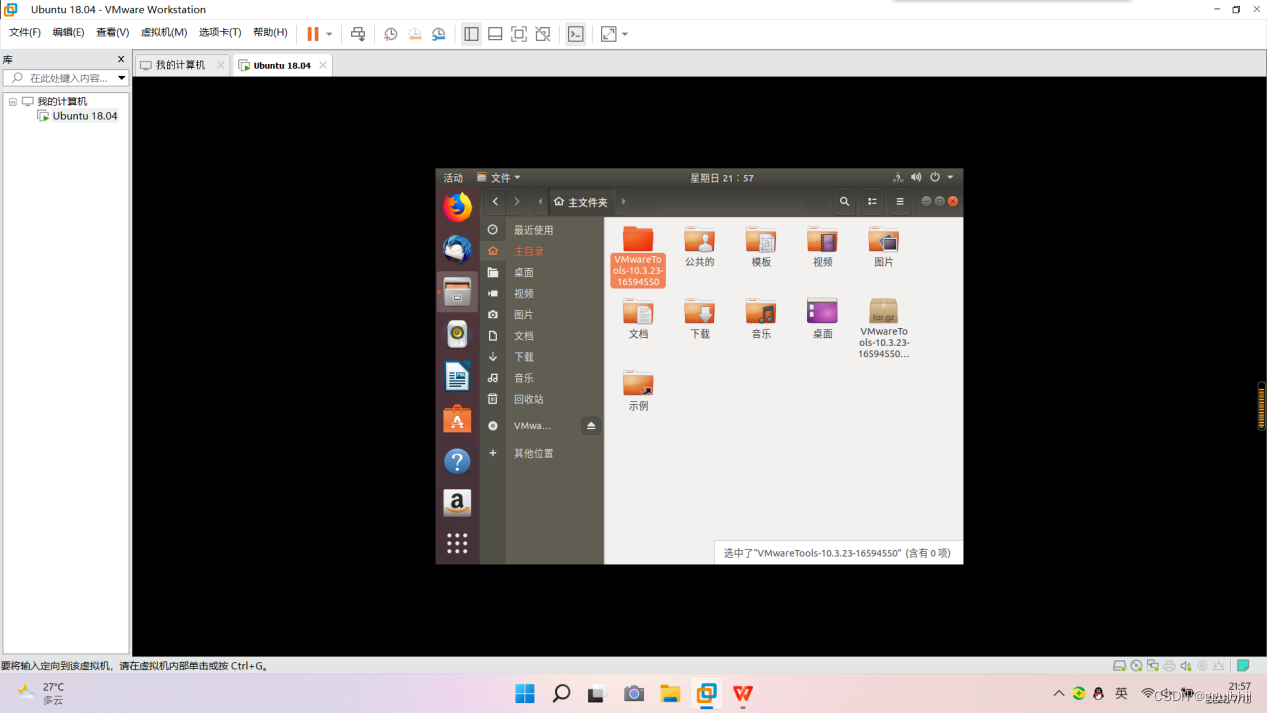
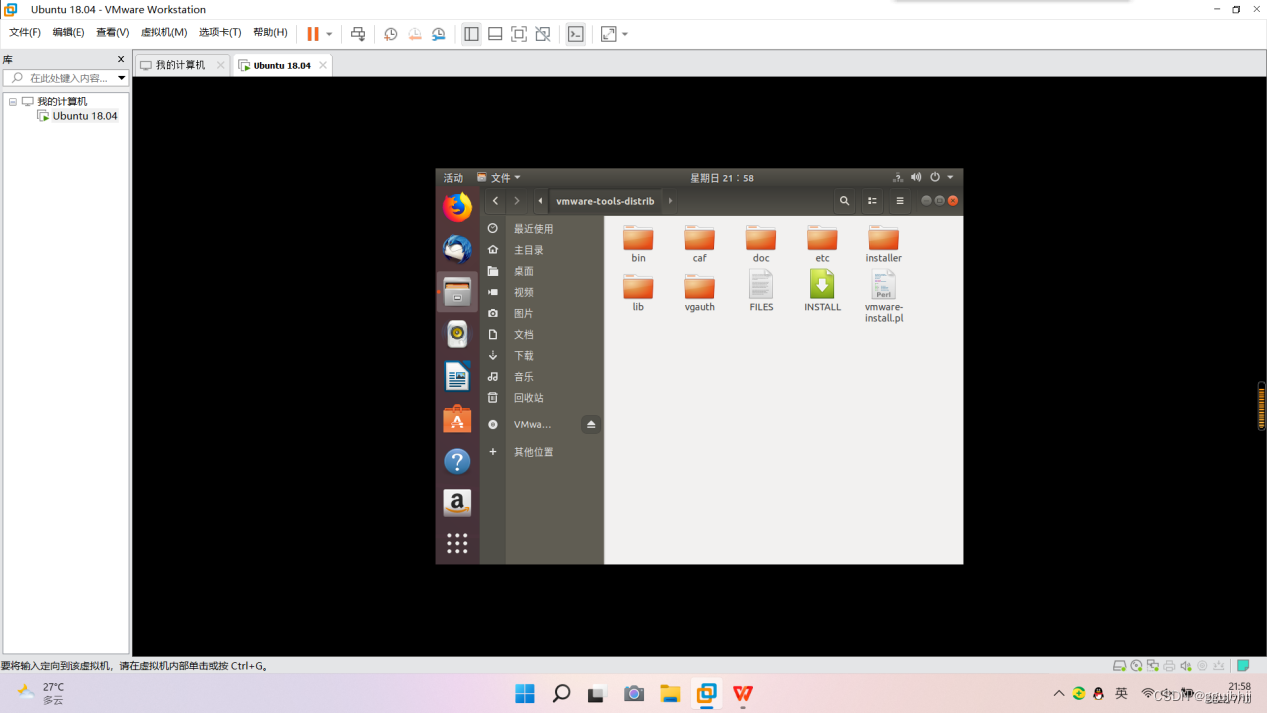
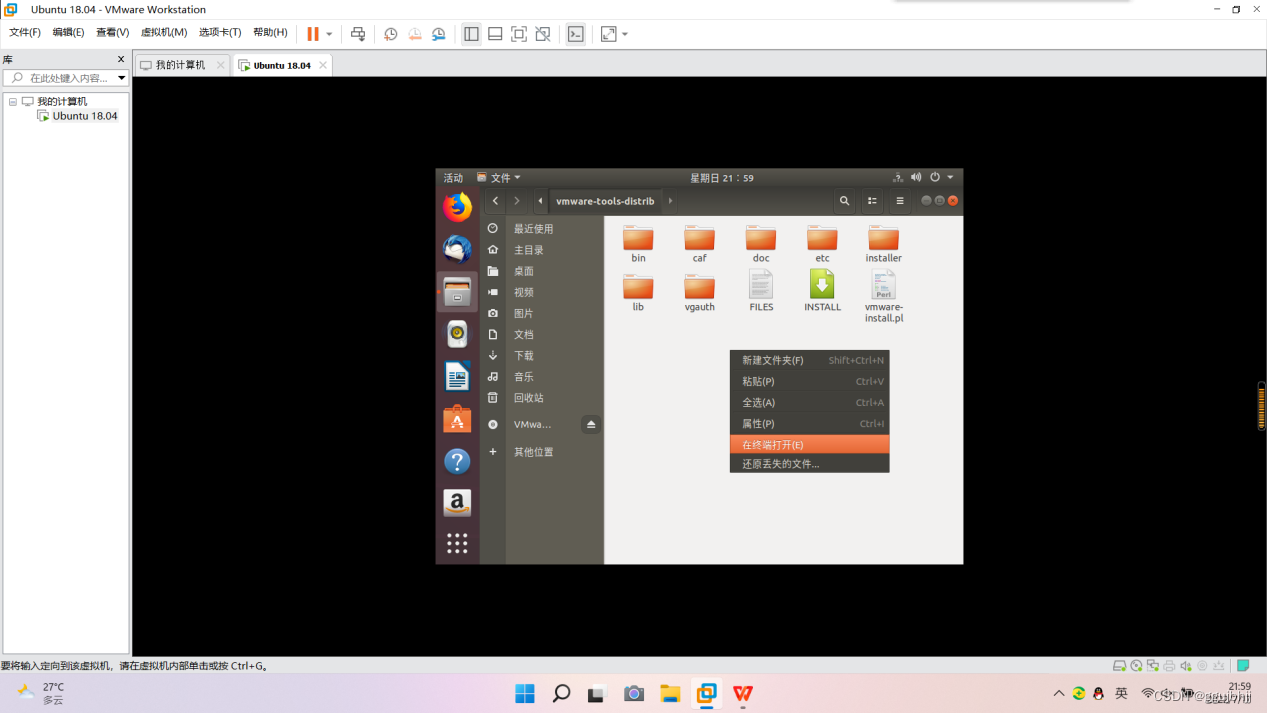
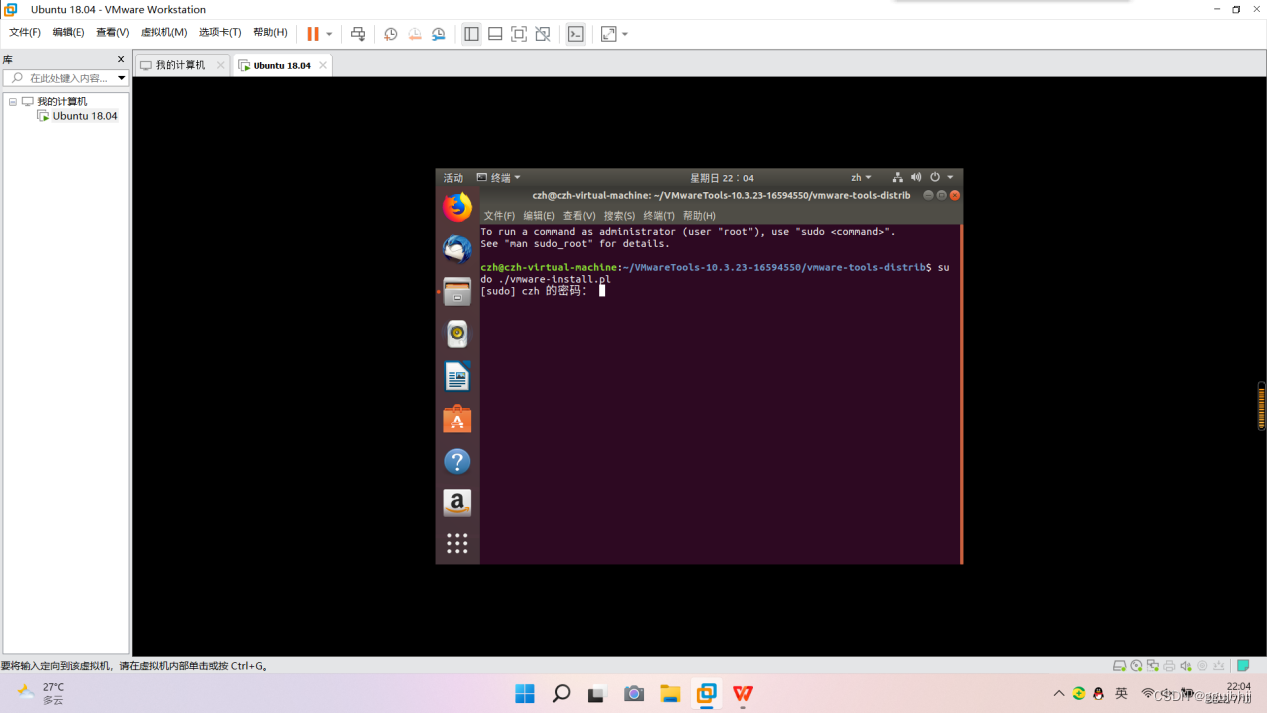
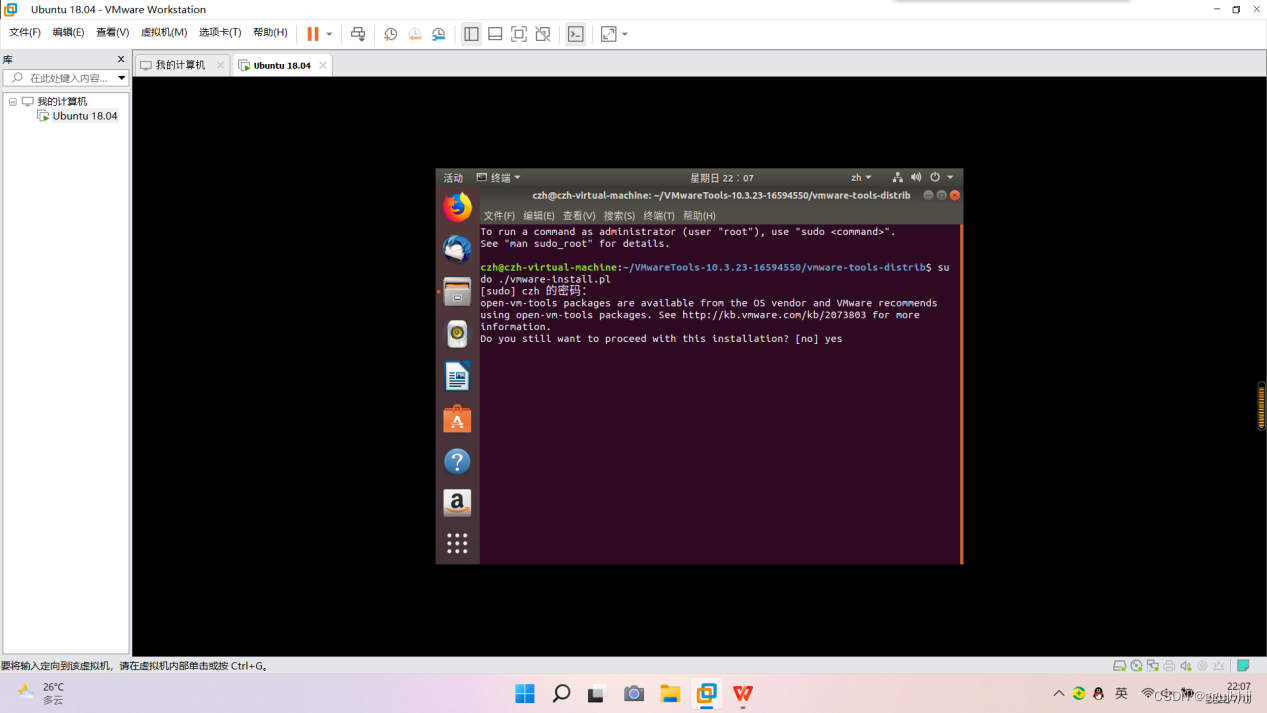
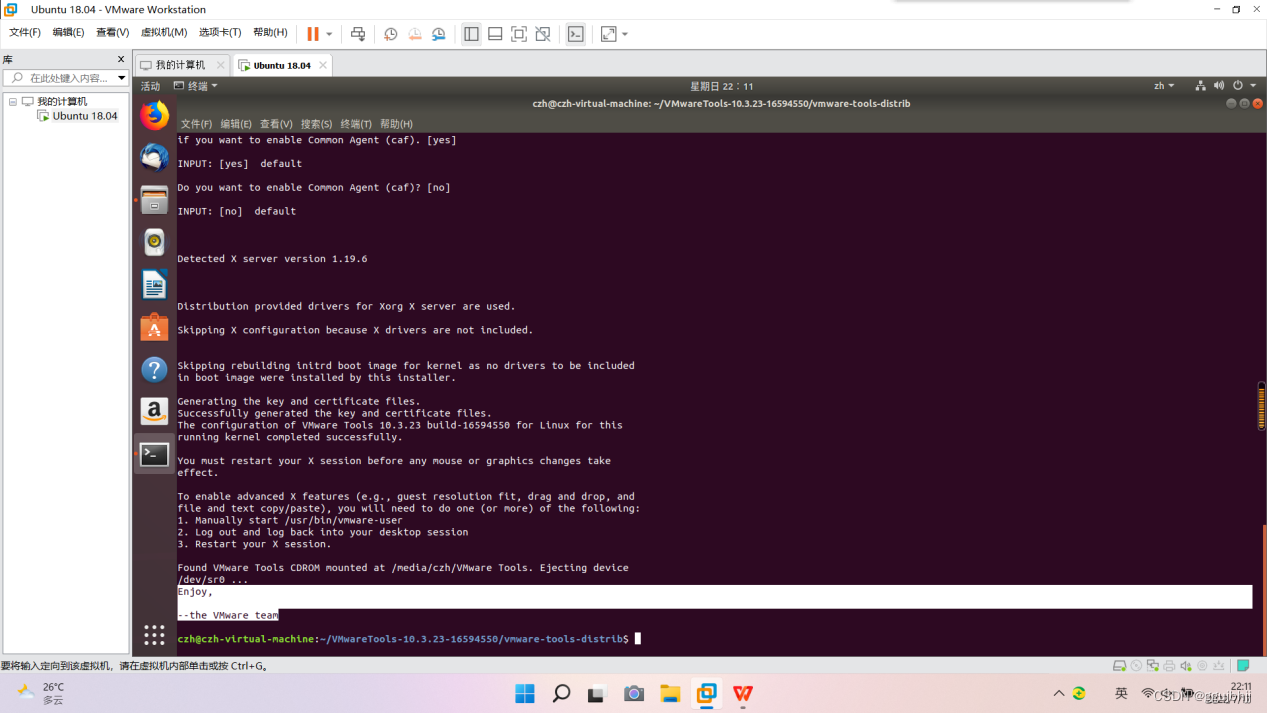
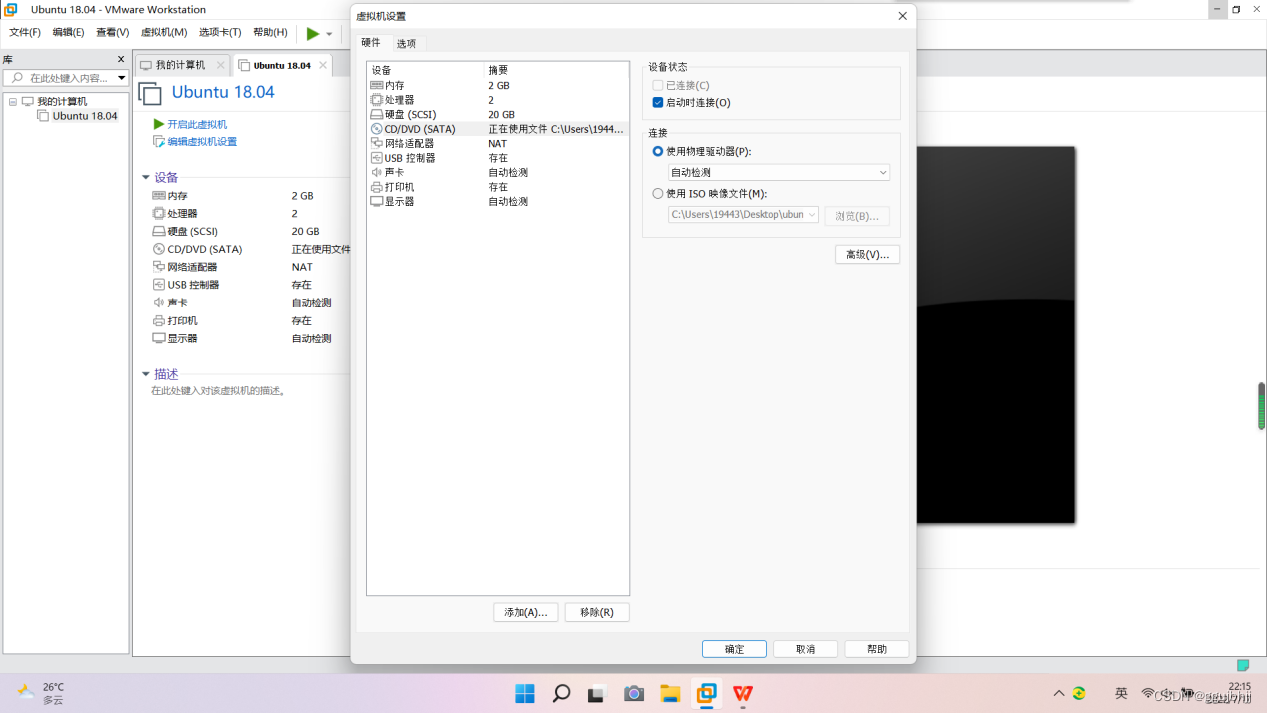
 可看到此时虚拟机屏幕较小,下面进行安装增强工具使虚拟机屏幕放大,选择“虚拟机”选项,选择“安装VMware Tools”选项,会在屏幕下方弹出提示,并在虚拟机屏幕中出现VMware Tools DVD光盘,关闭提示并打开此光盘图标如图所示,复制其中压缩包文件并粘贴在主文件夹主目录Home下,右键点击此压缩包“提取到此处”进行解压缩,打开解压缩后的文件夹,在如图所示界面下打开命令行运行脚本,空白处右键选择“在终端打开”,在终端界面输入“sudo ./vmware-install.pl”(“sudo”用于提升权限,以管理员权限运行)按回车键运行,提示输入密码,此处密码并非明文,无法看到输入字符效果,但已经输入进去,回车,过程中提示很多路径选择,基本上都可通过回车键完成,但第一步输入“yes”确定安装的,安装过程稍等片刻,“Enjoy. --the VMware team”提示完成安装,关闭终端,往往需要重新启动虚拟机使软件生效,虚拟机右上角关机按键关机。关机后点击“编辑虚拟机设置”,“CD/DVD”选项中选择“使用物理驱动器”拔出ISO映像,完成,开启此虚拟机,如有弹窗选择“否”,重启后可观察到虚拟机界面全屏效果。说明增强工具安装没有问题的,这就是安装成功之后的Ubuntu 18.04,为后续的学习和实践搭建好了基础工具平台准备。
可看到此时虚拟机屏幕较小,下面进行安装增强工具使虚拟机屏幕放大,选择“虚拟机”选项,选择“安装VMware Tools”选项,会在屏幕下方弹出提示,并在虚拟机屏幕中出现VMware Tools DVD光盘,关闭提示并打开此光盘图标如图所示,复制其中压缩包文件并粘贴在主文件夹主目录Home下,右键点击此压缩包“提取到此处”进行解压缩,打开解压缩后的文件夹,在如图所示界面下打开命令行运行脚本,空白处右键选择“在终端打开”,在终端界面输入“sudo ./vmware-install.pl”(“sudo”用于提升权限,以管理员权限运行)按回车键运行,提示输入密码,此处密码并非明文,无法看到输入字符效果,但已经输入进去,回车,过程中提示很多路径选择,基本上都可通过回车键完成,但第一步输入“yes”确定安装的,安装过程稍等片刻,“Enjoy. --the VMware team”提示完成安装,关闭终端,往往需要重新启动虚拟机使软件生效,虚拟机右上角关机按键关机。关机后点击“编辑虚拟机设置”,“CD/DVD”选项中选择“使用物理驱动器”拔出ISO映像,完成,开启此虚拟机,如有弹窗选择“否”,重启后可观察到虚拟机界面全屏效果。说明增强工具安装没有问题的,这就是安装成功之后的Ubuntu 18.04,为后续的学习和实践搭建好了基础工具平台准备。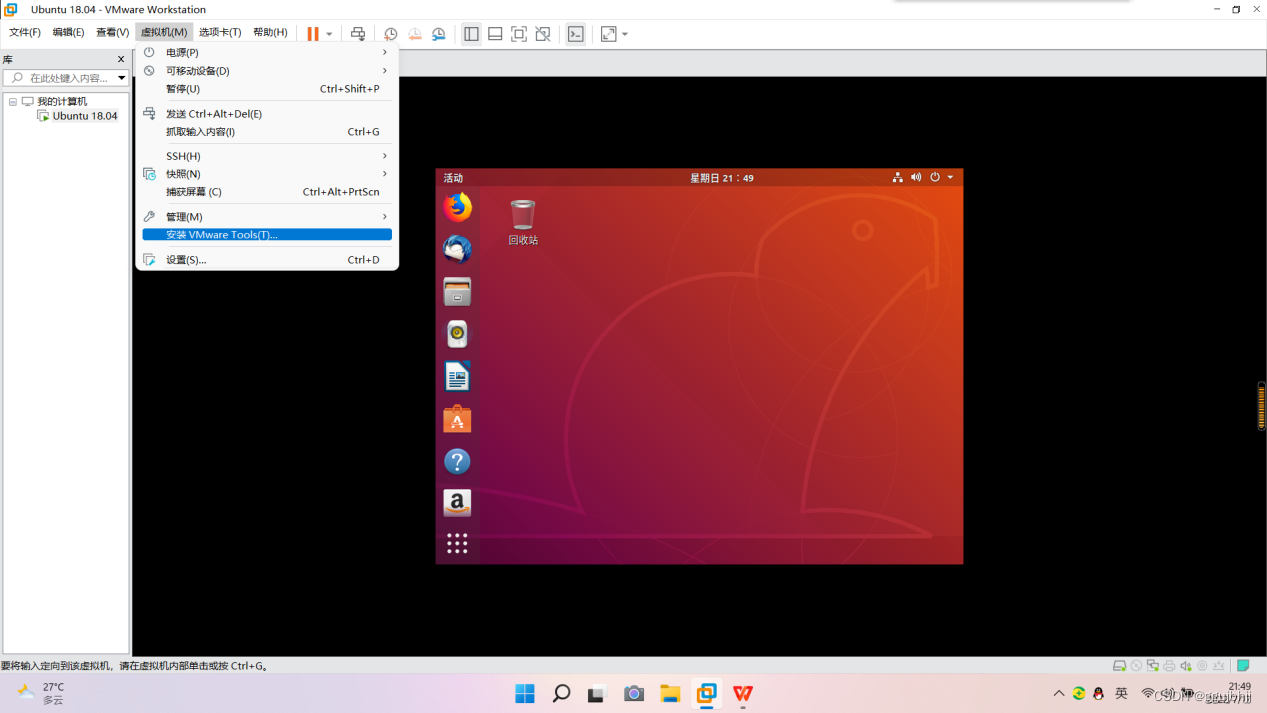
 1.2.2ROS安装
1.2.2ROS安装
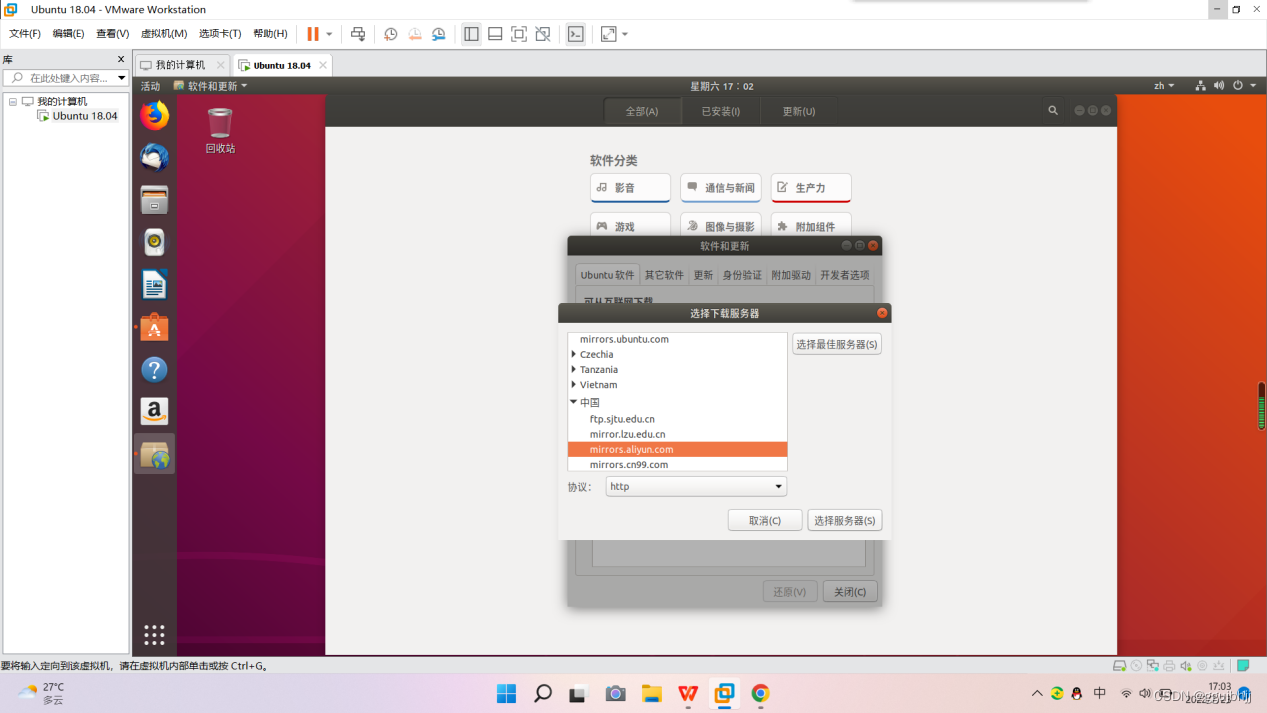
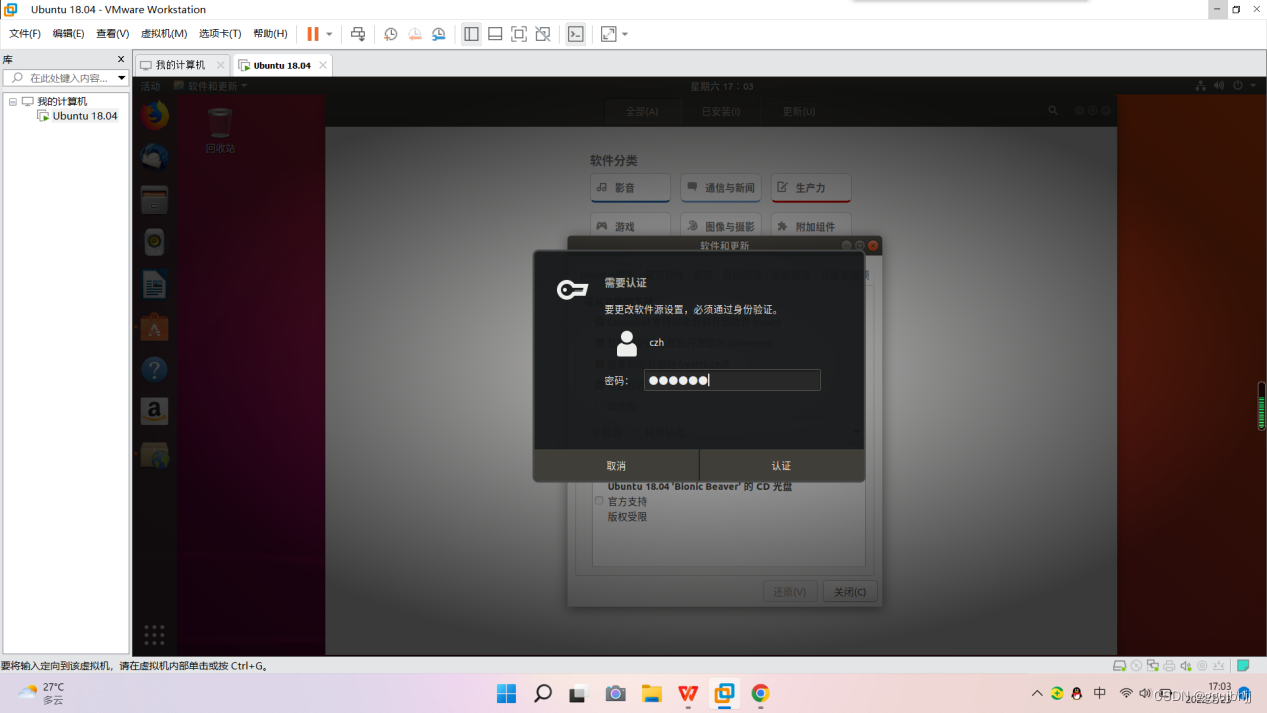
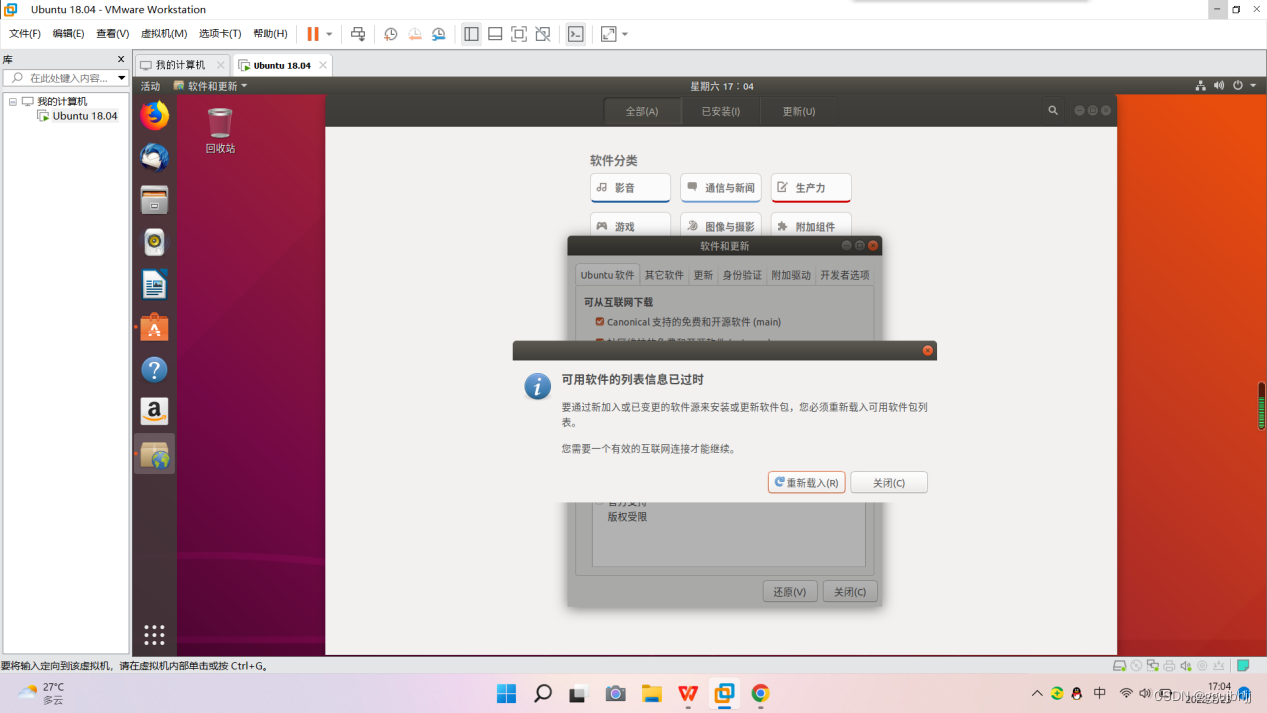
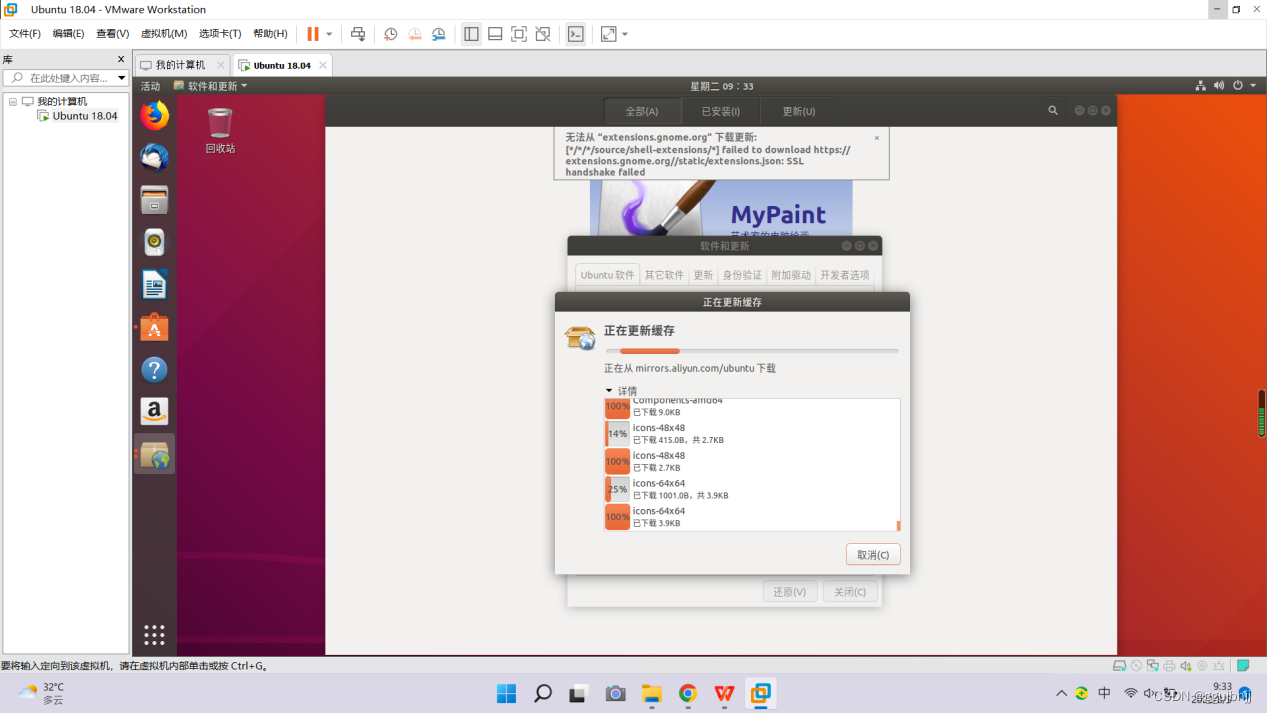
配置软件库,打开软件中心,点击左上角打开软件和更新,确保前四项选中配置无误。此处可以选择服务器,可选择点击“选择最佳服务器”确定最佳镜像,也可根据网络情况自主选择,此处选择阿里云服务器,输入密码认证,重新载入。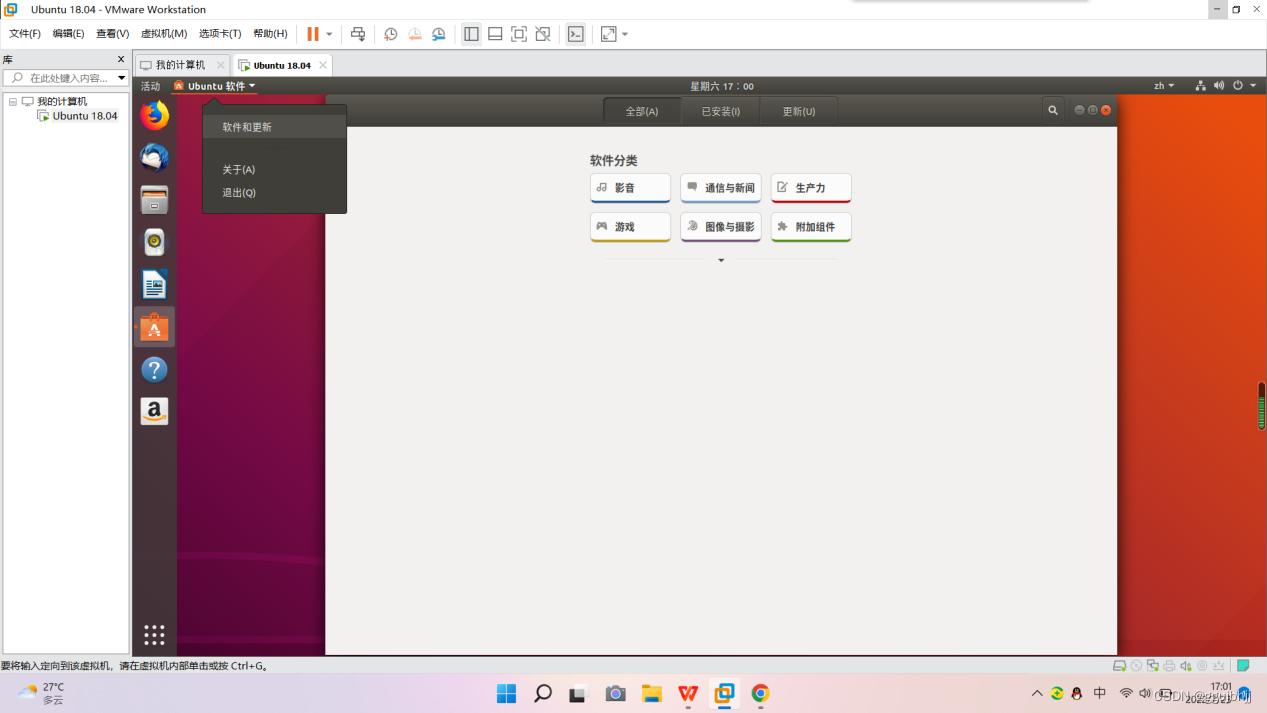
 添加ROS软件源,打开终端,输入命令
添加ROS软件源,打开终端,输入命令
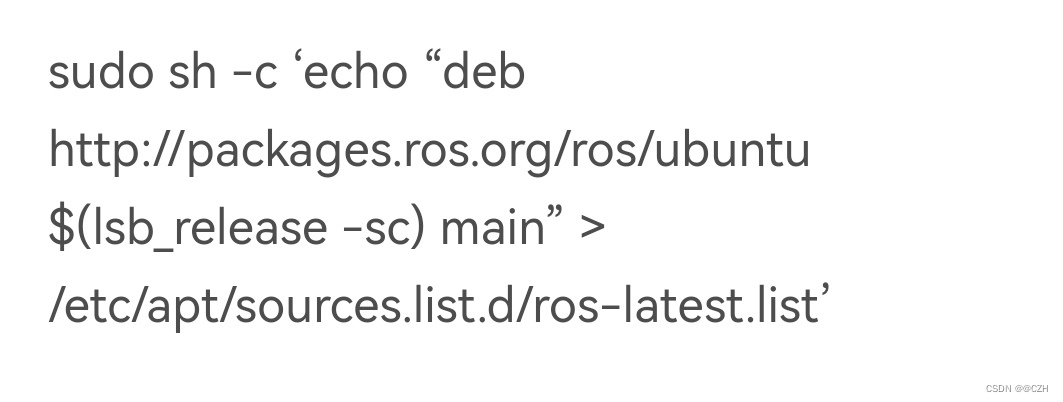
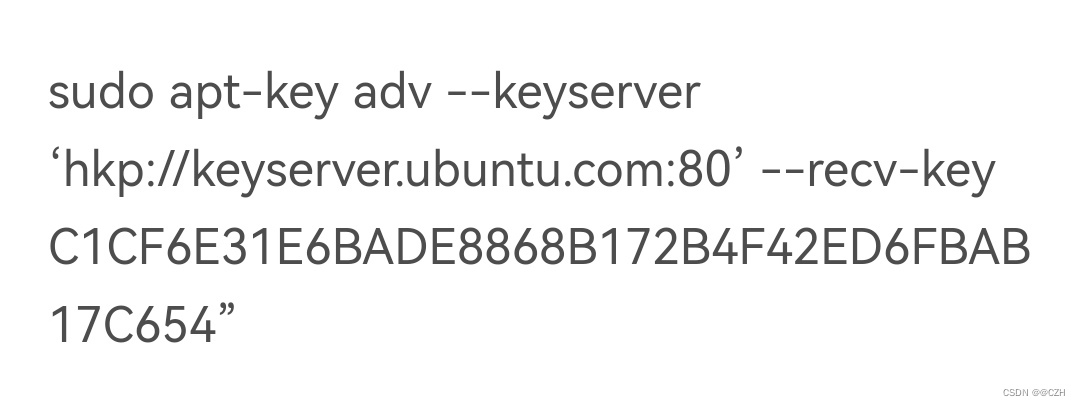
回车并输入密码,添加ROS官方的软件源镜像。添加密钥,在终端中输入
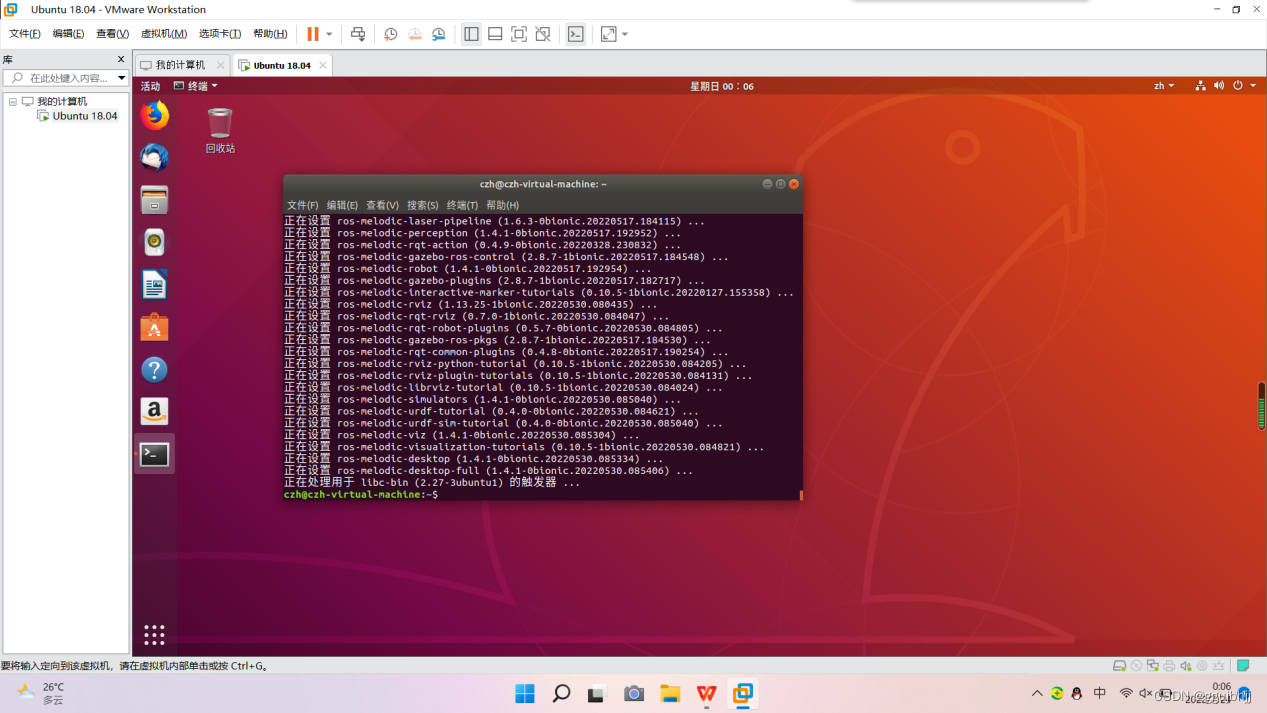
安装ROS,首先使用如下命令更新软件源“sudo apt-get update”,输入如下命令“sudo apt-get install ros-melodic-desktop-full”桌面完整版安装,在提示中输入“y”并回车继续安装,安装过程时间较长需要耐心等待。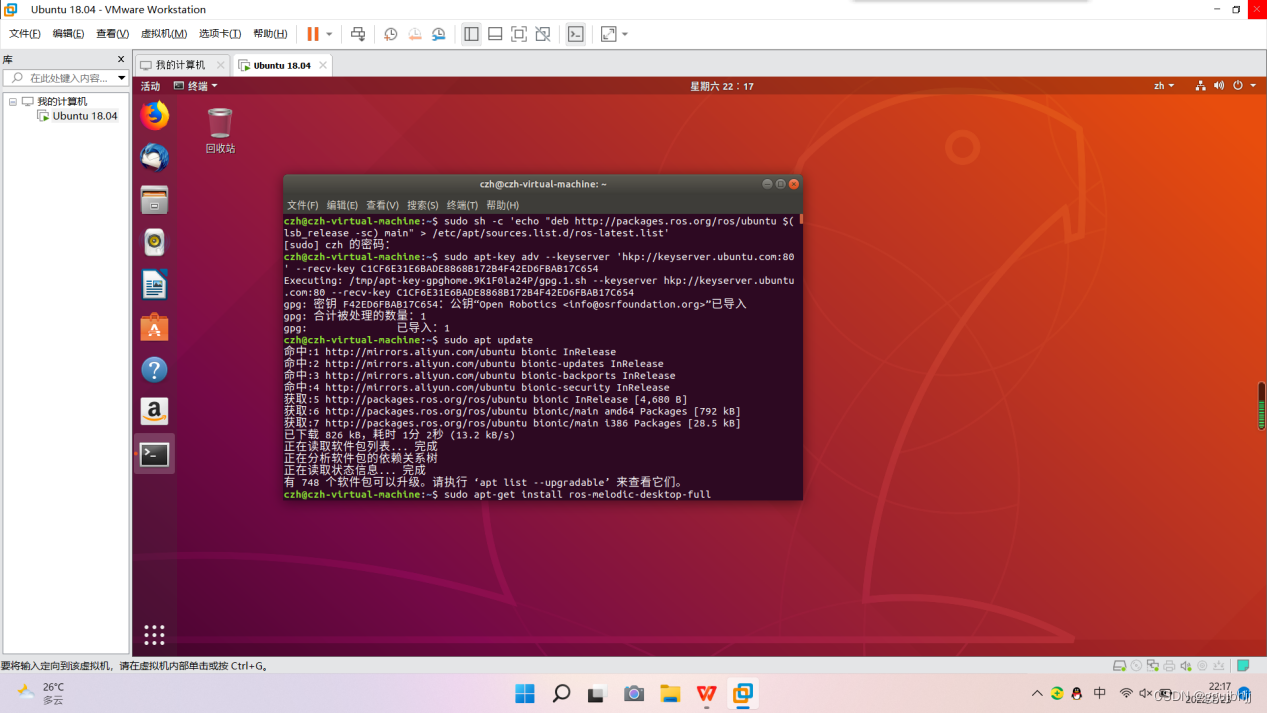
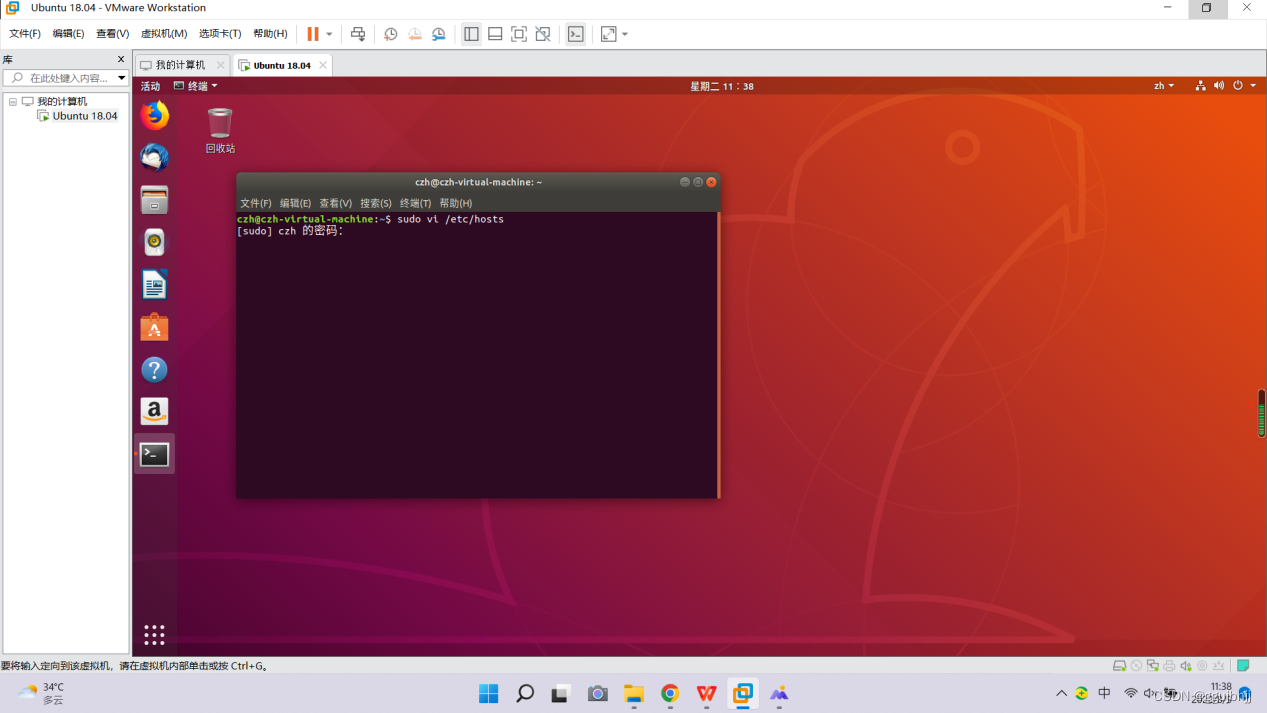
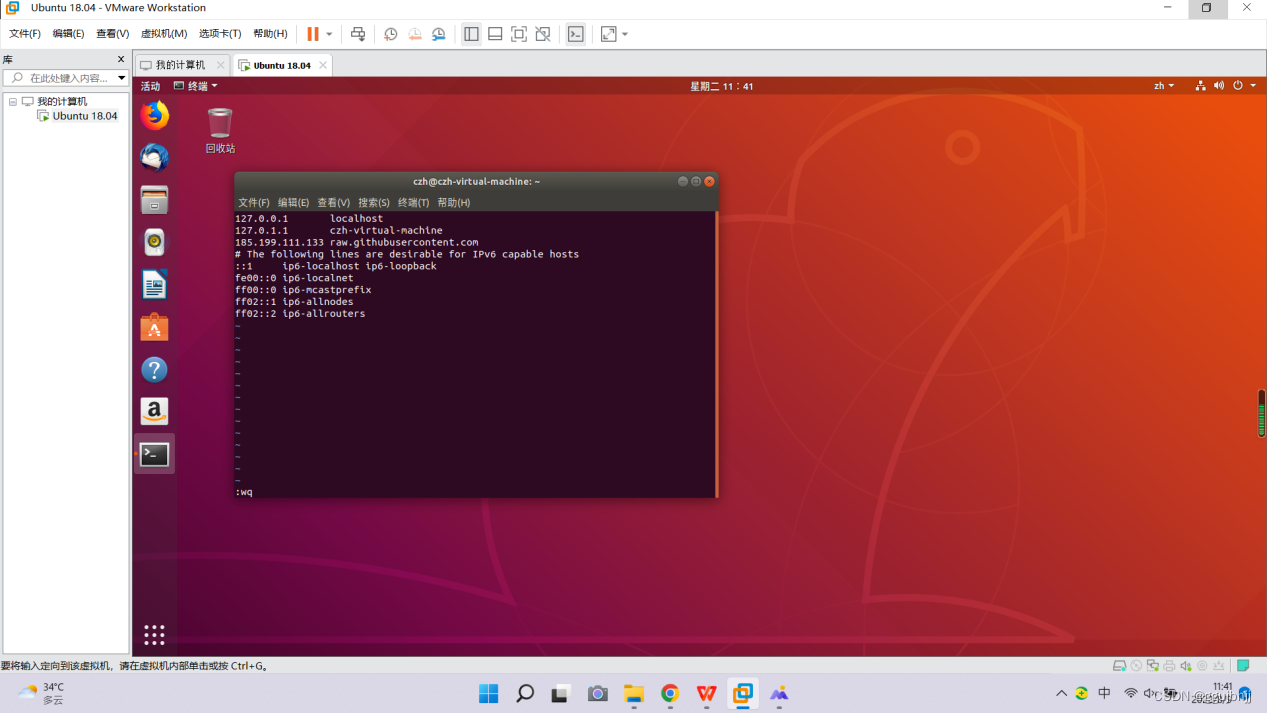
 初始化rosdep,终端输入命令“sudo rosdep init”,若显示“sudo:rosdep无法找到命令”,输入“sudo apt install python-rosdep2”,再次初始化,若显示“Website may be down”,是由于外网网址访问不稳定造成的,终端输入“sudo vi /etc/hosts”,将光标移动到输入处键i进行编辑,输入
初始化rosdep,终端输入命令“sudo rosdep init”,若显示“sudo:rosdep无法找到命令”,输入“sudo apt install python-rosdep2”,再次初始化,若显示“Website may be down”,是由于外网网址访问不稳定造成的,终端输入“sudo vi /etc/hosts”,将光标移动到输入处键i进行编辑,输入
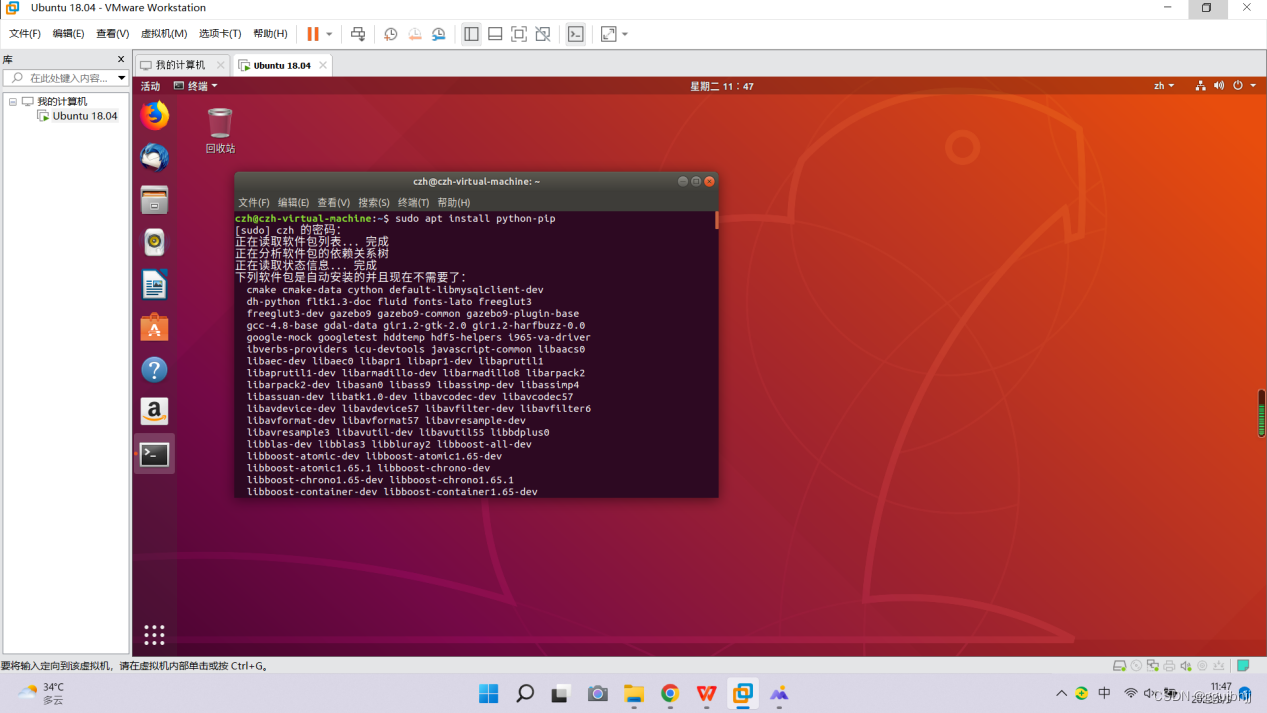
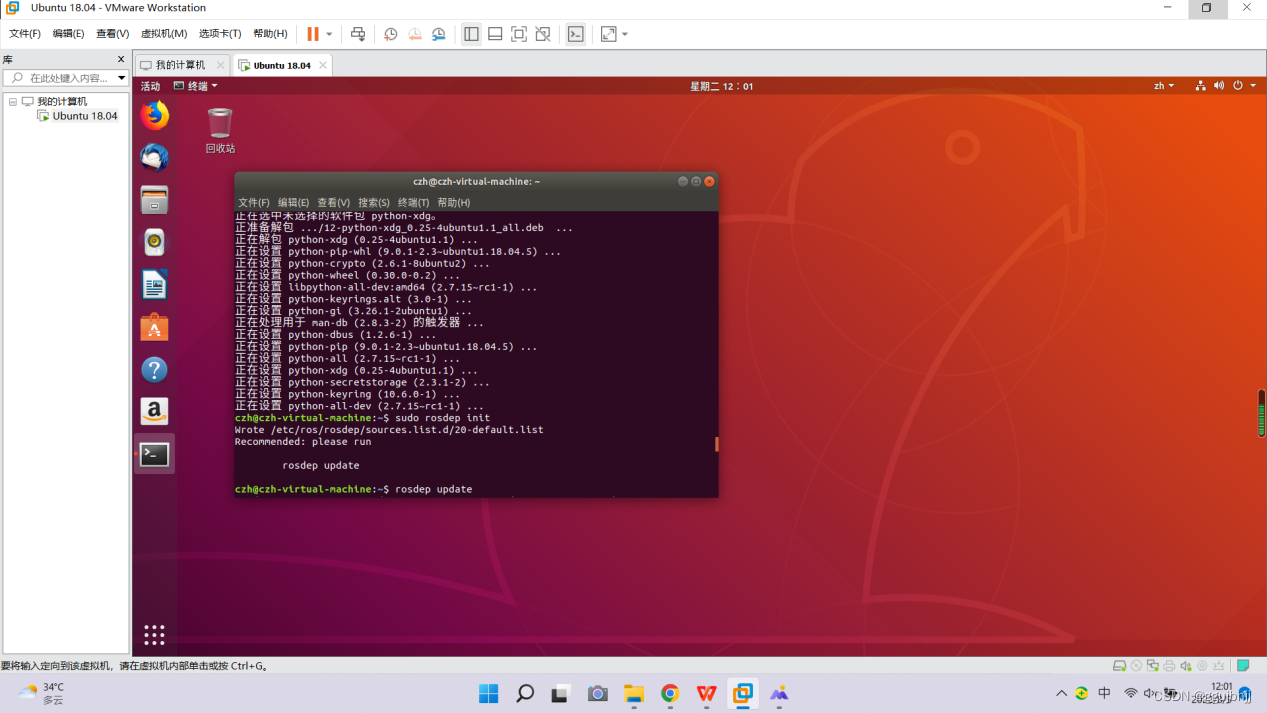
ctrl+c进行保存,键入:wq键入回车完成编辑,终端输入“sudo apt install python-pip”下载安装pip,再次初始化“sudo rosdep init”如图显示成功,输入“rosdep update”完成。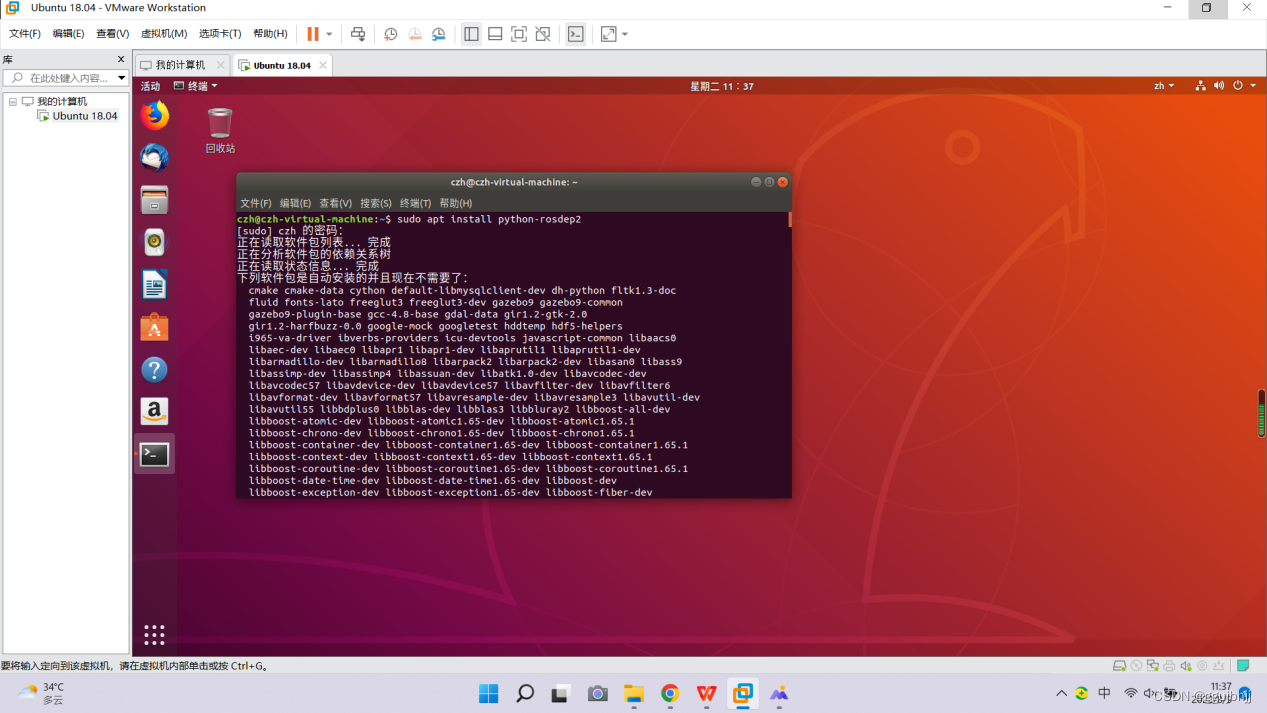
 设置环境变量,在Ubuntu默认终端bash设置ROS环境变量,终端输入命令“echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc”“source ~/.bashrc”完成环境变量设置,并可通过终端输入“ROS”键入tab键如图所示说明环境变量设置成功。
设置环境变量,在Ubuntu默认终端bash设置ROS环境变量,终端输入命令“echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc”“source ~/.bashrc”完成环境变量设置,并可通过终端输入“ROS”键入tab键如图所示说明环境变量设置成功。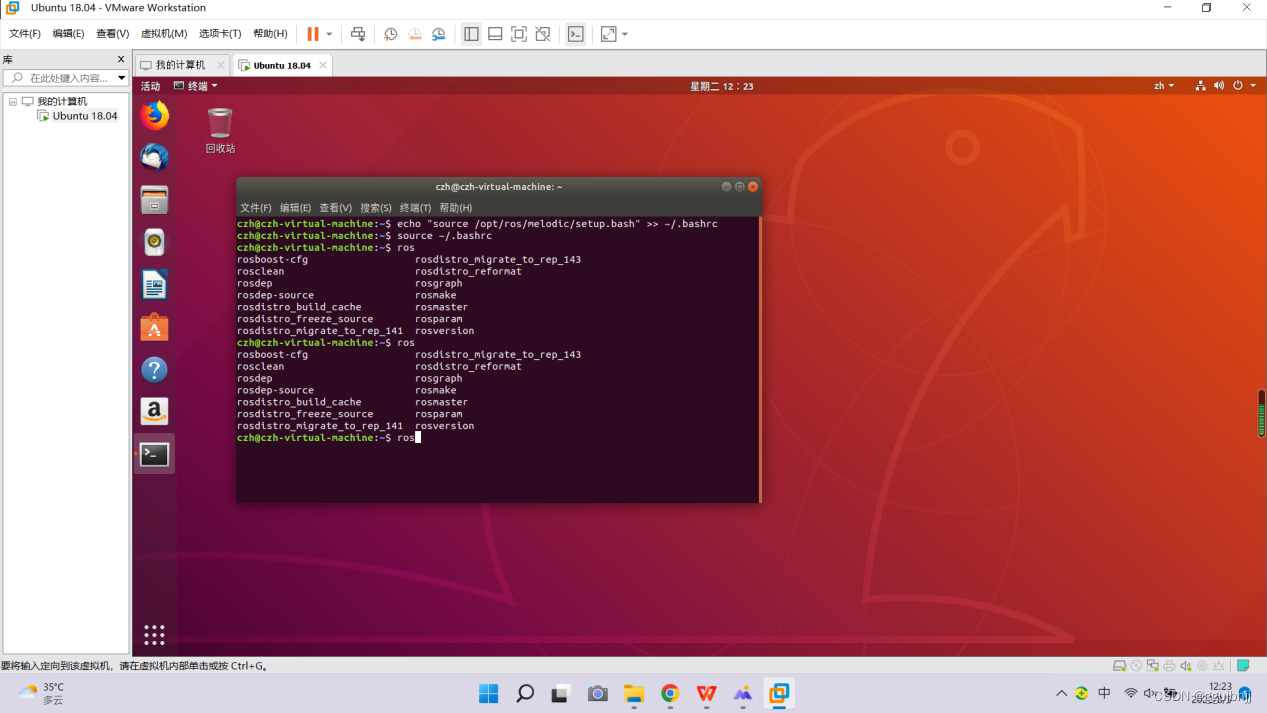
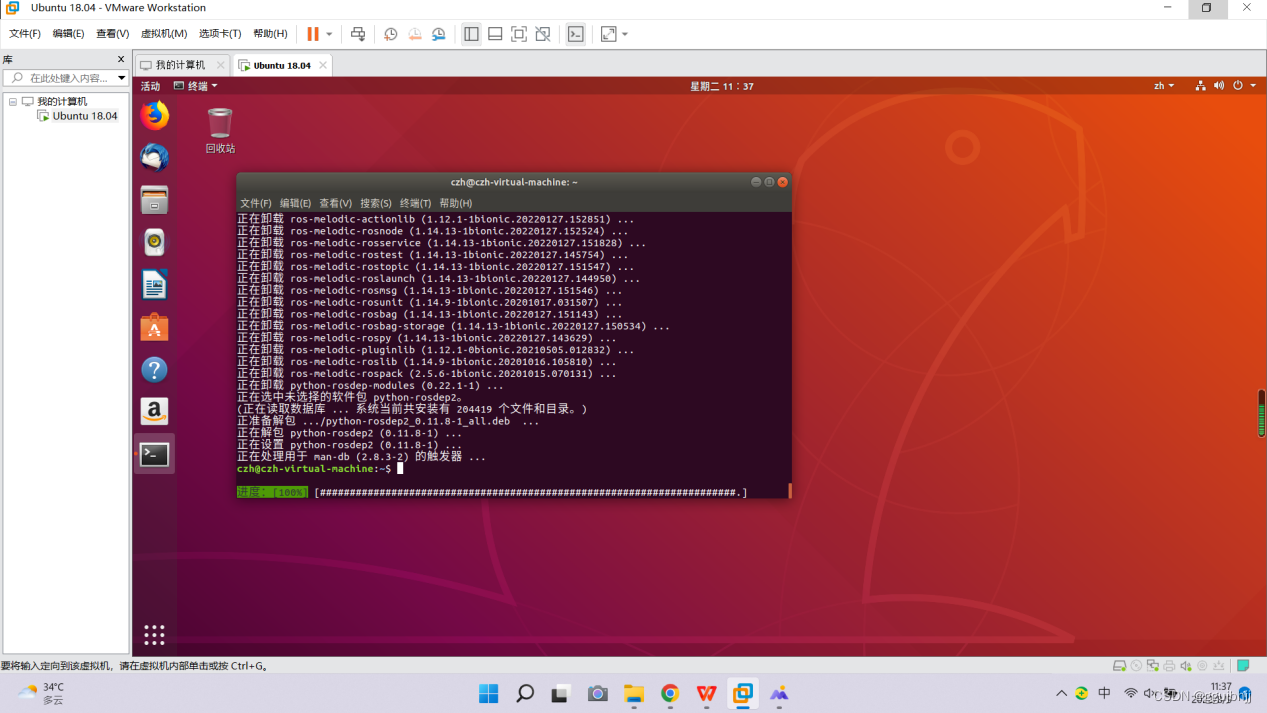
由于之前的操作终端命令“sudo apt install python-rosdep2”造成卸载部分软件包,因此此时可再次通过ROS安装指令“sudo apt-get install ros-melodic-desktop-full”重新下载已卸载安装包,以免造成后续安装过程失败。
rosinstall是ROS中一个常用工具,可以下载安装ROS中的功能包程序,暂时不是必需的,为了便于后续开发实践,此处通过终端命令安装“sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential”。至此ROS安装基本完成。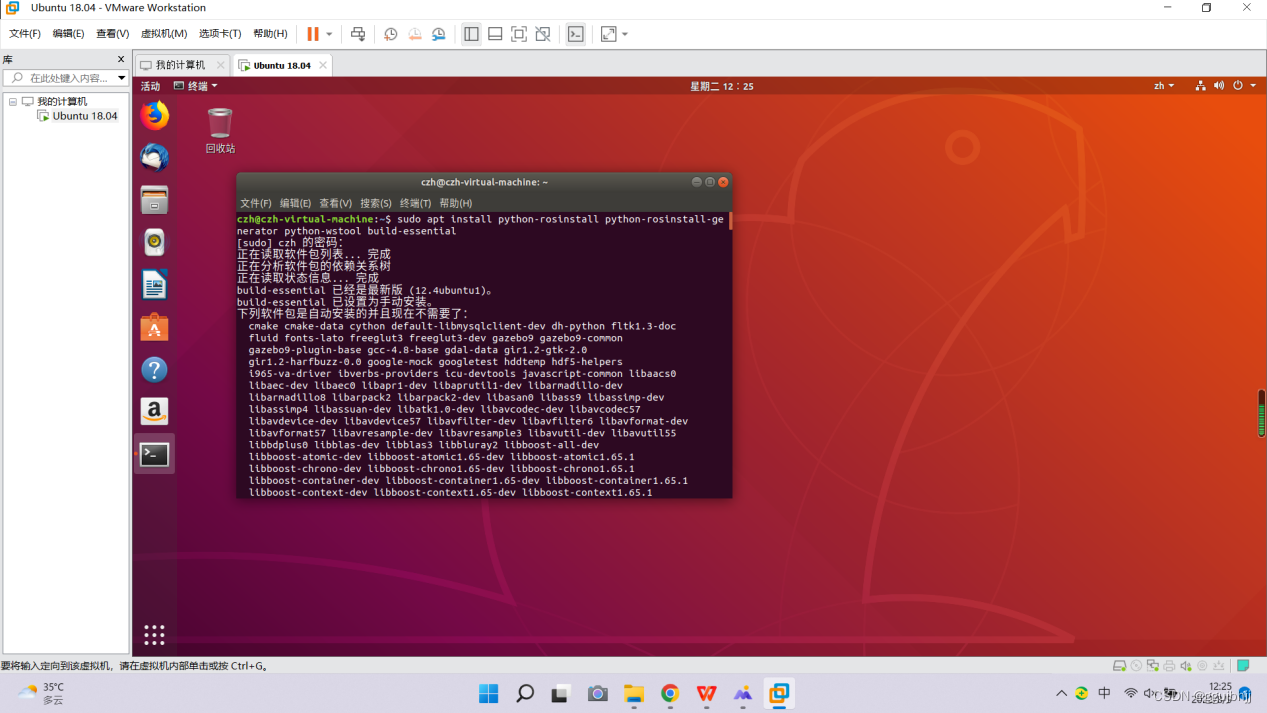

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)