移动机器人建图导航
·
一、激光建图
打开一终端执行:
roslaunch aimibot minimal.launch
新开终端启动 gmapping,用于构建地图,执行:
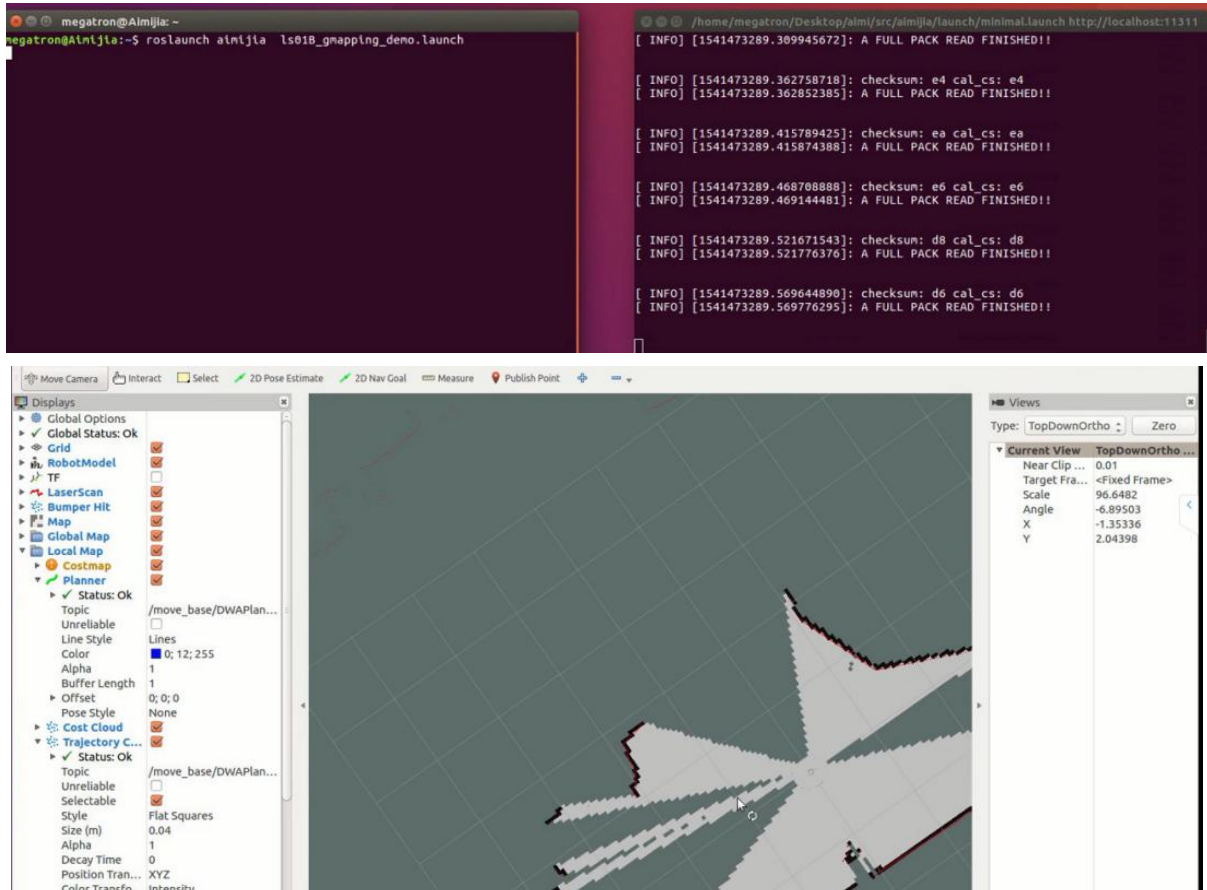
roslaunch aimibot ls01B_gmapping_demo.launch
此命令将打开 rviz 显示环境,我们将观察到实时建图信息,如图所示:
 二、移动控制
二、移动控制
打开一终端执行 roslaunch aimibot keyboard_teleop.launch,通过键盘操作机器人:
roslaunch aimibot keyboard_teleop.launch
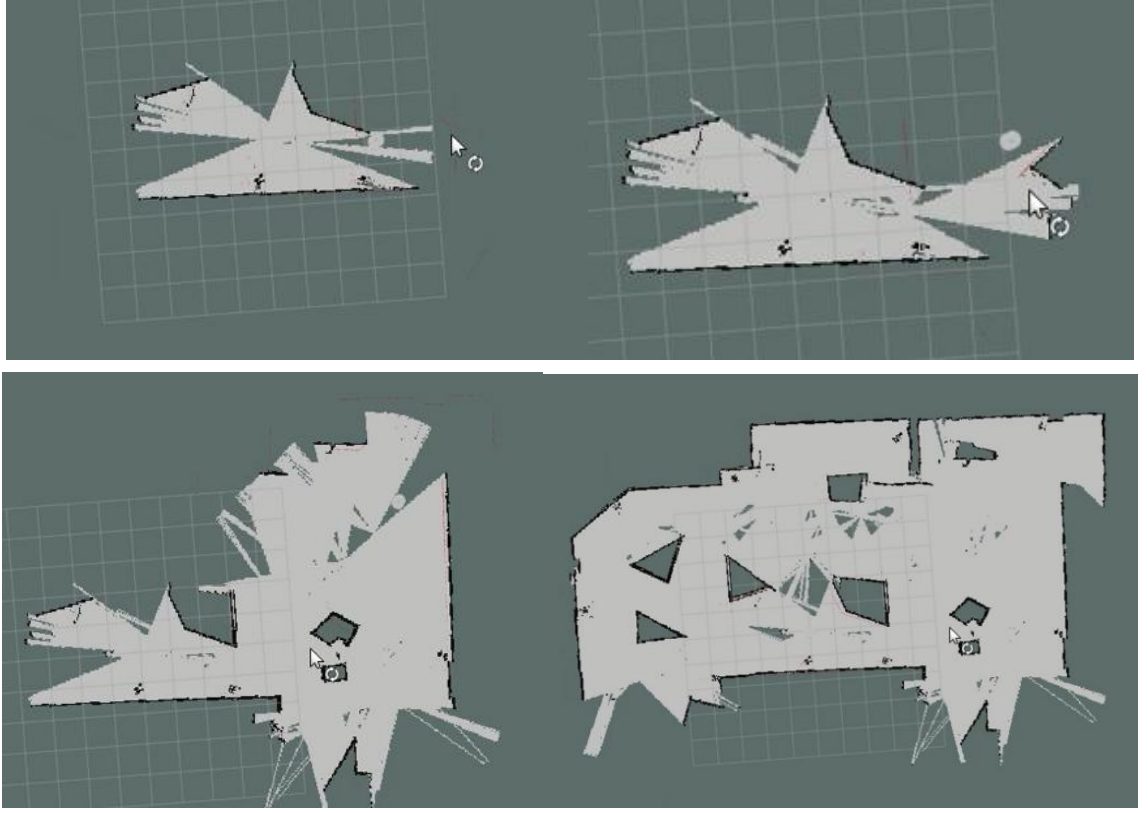
通过键盘控制底盘开始建图,控制机器人在区域中运行,并在 rviz 的界面中实时显示,获得该区域的完整地图后如图所示:
三、保存地图
将得到的地图信息保存在电脑中,新开一终端,执行新建文件夹命令:
mkdir -p ~/map
使用 ros 中的 map_server 工具保存使用激光获得的地图
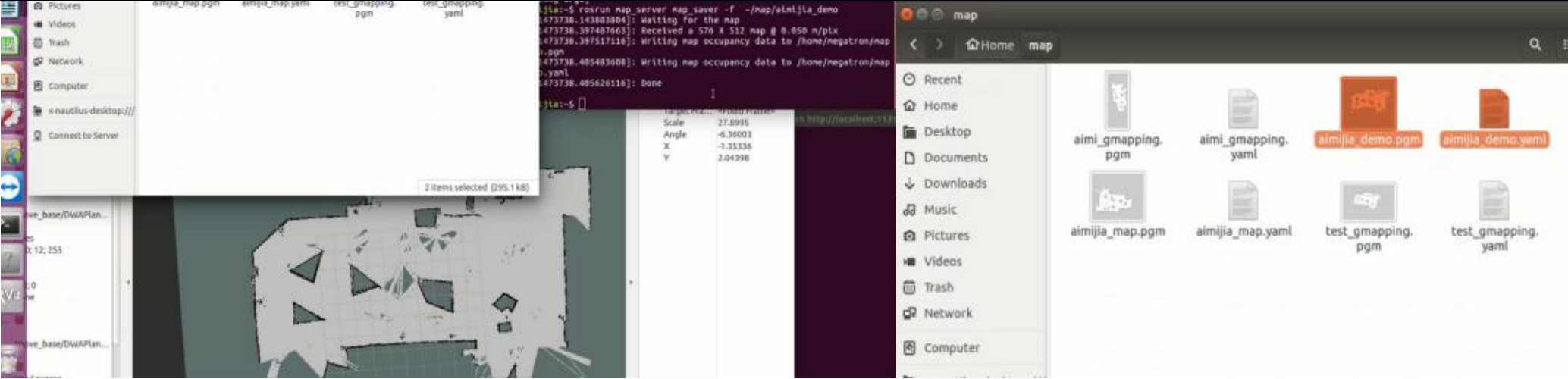
rosrun map_server map_saver -f ~/map/aimijia_demo
在文件夹中可看到,地图文件
关闭所有终端。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)