【Isaac Lab/Isaac Sim】教程3:基于Surface Gripper制作真空吸盘
本文详细介绍了在Isaac Sim中构建真空吸盘模型的完整流程。首先通过创建Xform并添加圆柱体和立方体构建基本模型结构,然后配置D6关节和驱动器参数实现运动控制。接着添加Surface Gripper组件实现吸附功能,并为模型设置质量属性。最后可选地配置表面材质以增强视觉效果。整个过程包含详细的参数设置和操作截图,为机器人仿真中的真空吸盘建模提供了实用指导。
1 构建真空吸盘模型
-
打开Isaac Sim
cd path/to/isaacsim ./isaac-sim.sh
-
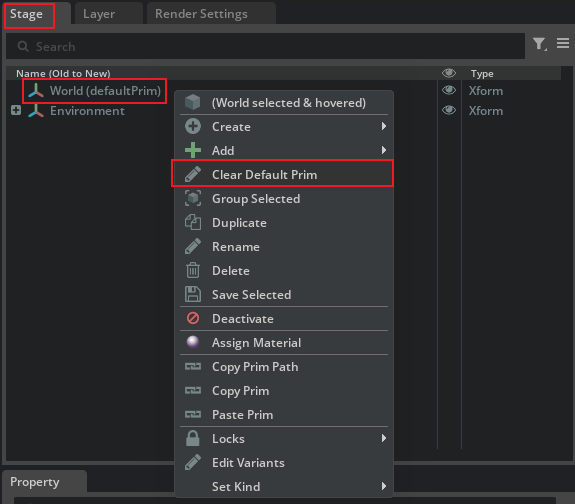
在Stage中选中World,右键选择Clear Default Prim,将World取消默认Prim
-
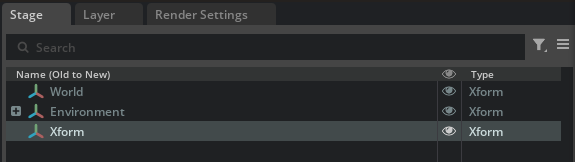
在Stage中创建一个Xform。
-
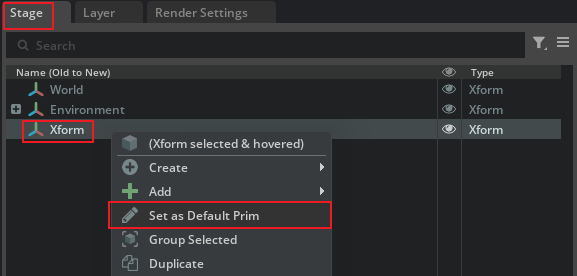
选中Xform,右键选择Set as Default Prim,将Xform设置为Default Prim。
-
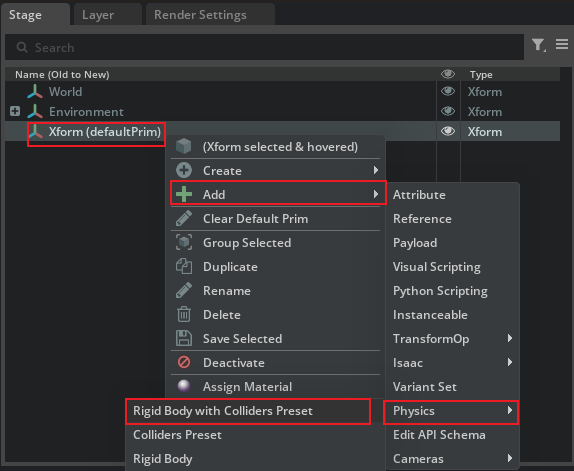
给Xform添加刚体和碰撞属性。
-
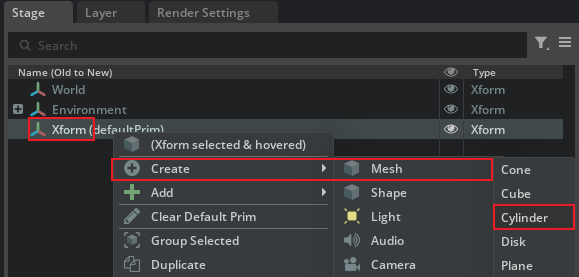
选中Xform,右键Create->Mesh->Cylinder,创建两个圆柱体,分别命名为Mount和Tube。
-
按照如下参数设置Mount和Tube的变换参数
Mesh名称 Translate Orientation Scale Mount 0,0,0.005 0,0,0 0.07,0.07,0.01 Tube 0,0,0.06 0,0,0 0.01,0.01,0.1 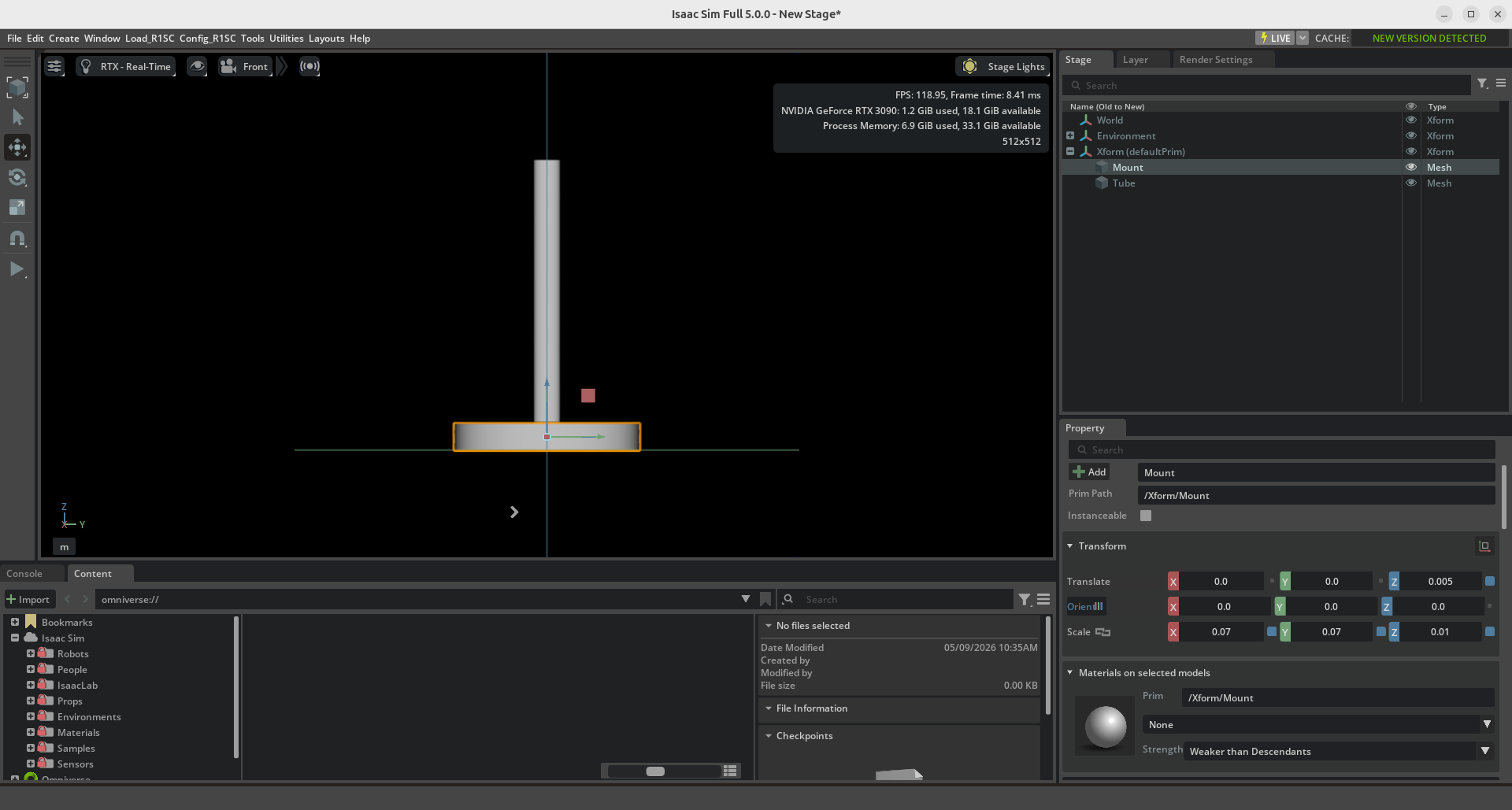
-
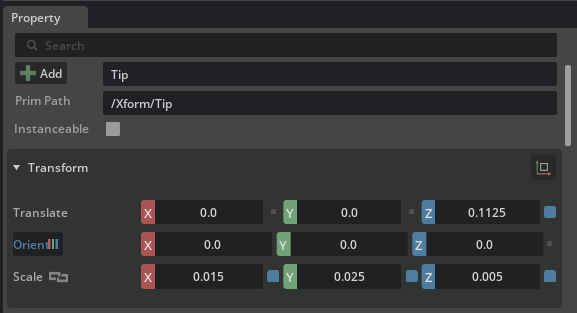
选中Xform,右键Create->Mesh->Cube,创建一个立方体,命名为Tip,并修改变换参数如下
-
至此真空吸盘模型搭建完成。
2 添加D6关节和驱动器
-
选中Xform,Create->Xform,创建一个Xform,命名为Suction_Cup,将坐标系移动到Tip表面。

-
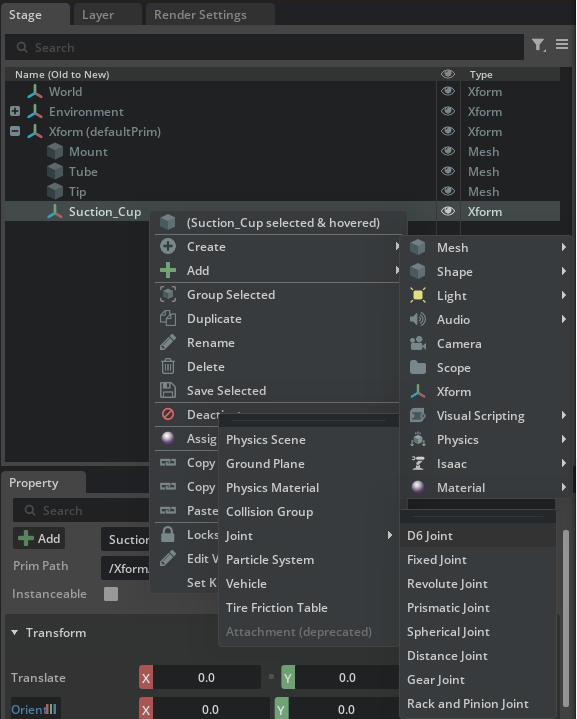
选中Suction_Cup,右键Create->Physics->Joint->D6 Joint,创建一个D6关节,并重命名为suction_cup_joint。
-
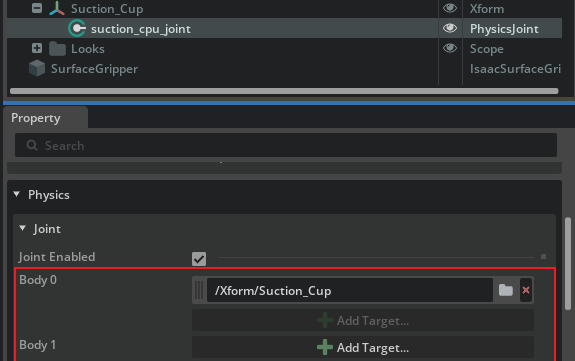
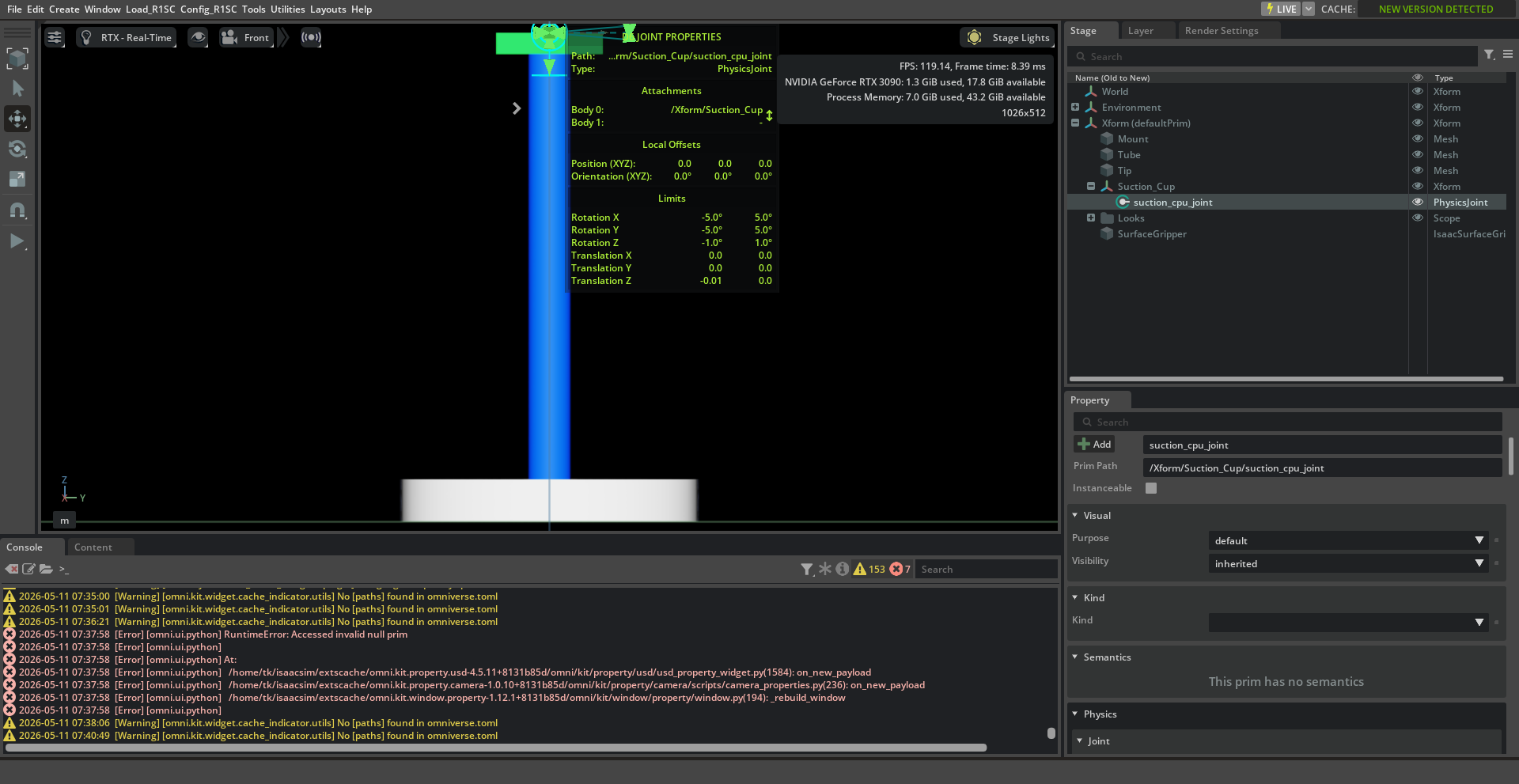
选中suction_cup_joint,将Body0设置为/Xform/Suction_Cup,取消Body1
-
修改suction_cup_joint的Limit属性
属性 Low Limit Hight Limit X Axis Rotation -5.0 5.0 Y Axis Rotation -5.0 5.0 Z Axis Rotation -1.0 1.0 X Axis Translation 0 0 Y Axis Translation 0 0 Z Axis Translation 0 0.01 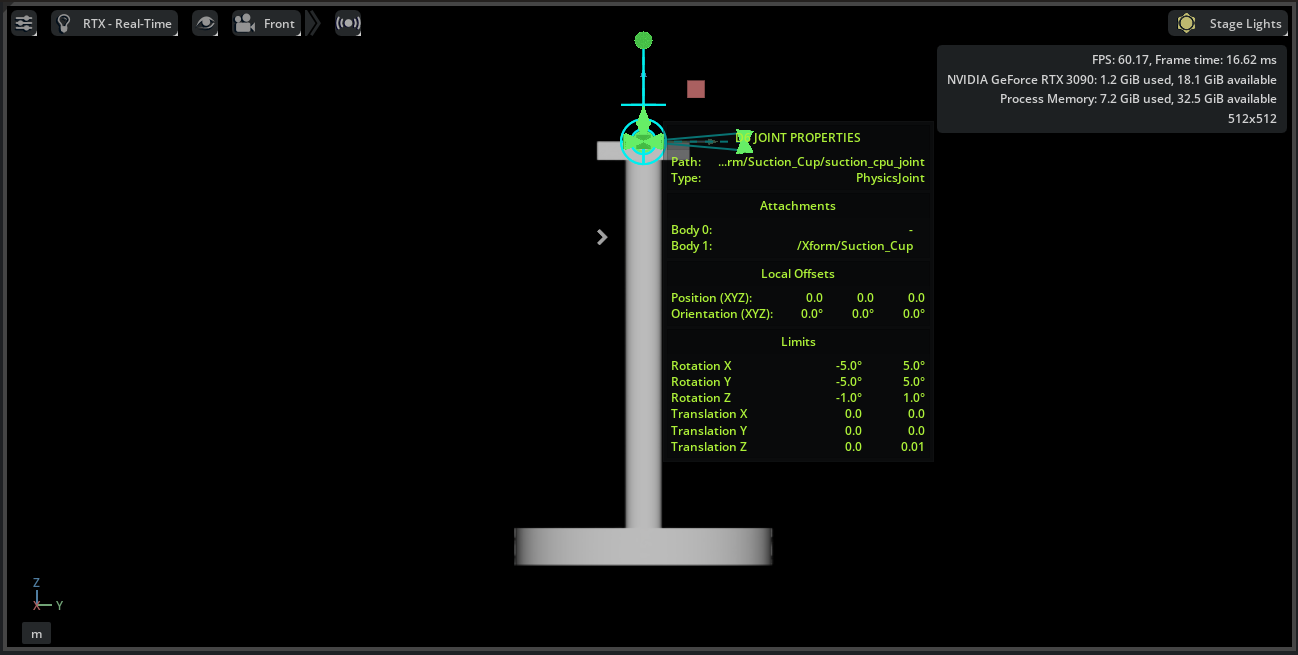
-
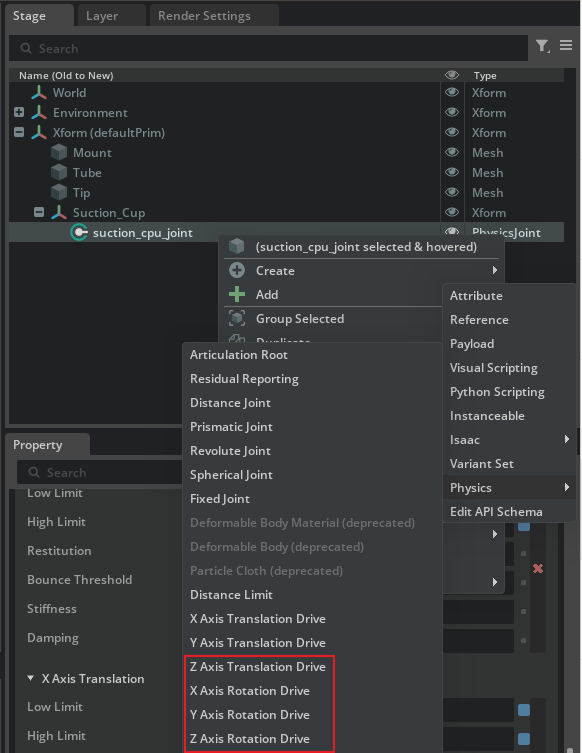
选中suction_cup_joint,右键添加如下驱动器。
-
修改驱动器参数如下
驱动器 Damping Stiffness X Axis Rotation 100 1000 Y Axis Rotation 100 1000 Z Axis Rotation 100 1000 Z Axis Translation 100 1000 -
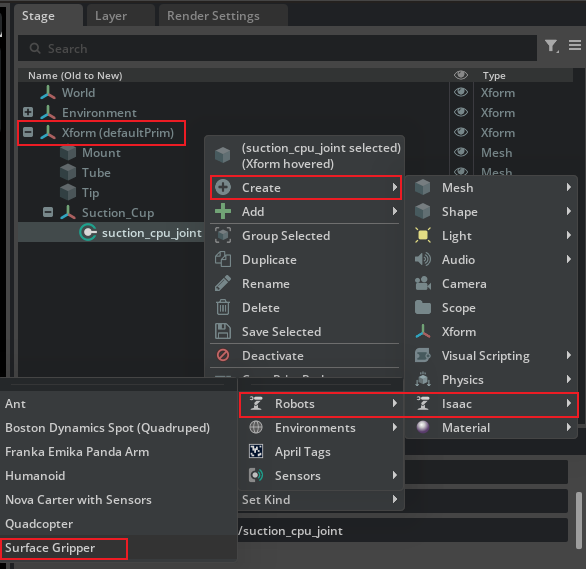
选中Xform,右键Create->Isaac->Robots->Surface Gripper,添加Isaac Sim内置的表面吸附器Surface Gripper到真空吸盘模型。
-
选中Surface Gripper,设置属性如下
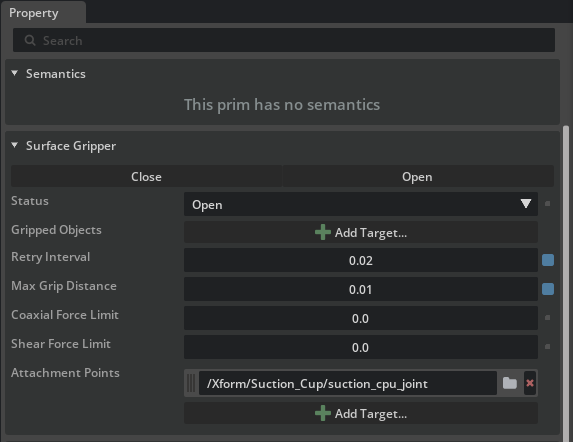
-
支持真空吸盘模型关节和驱动器添加完成。
3 为真空吸盘模型添加质量
-
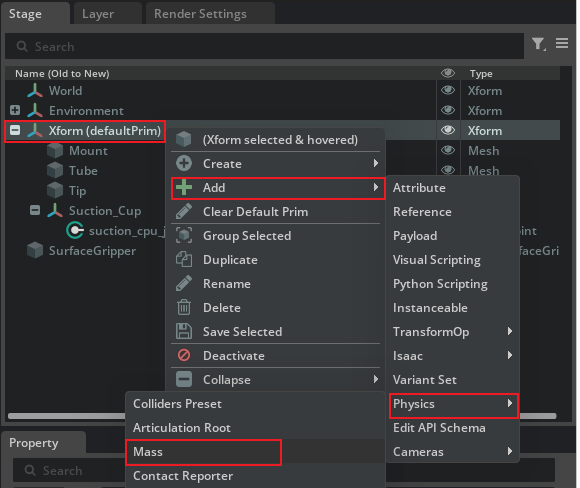
选中Xform,添加Mass属性。
-
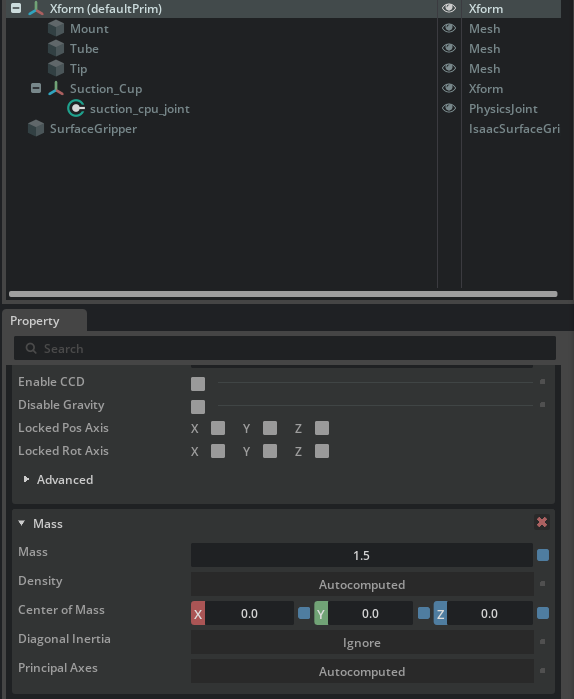
设置Mass属性如下,质量Mass可根据实际情况调整,此处设置为1.5Kg。
-
至此正空吸盘模型已可以使用,点击保存即可在别的Stage中导入使用。
4 为真空吸盘配置表面材质(可选)
-
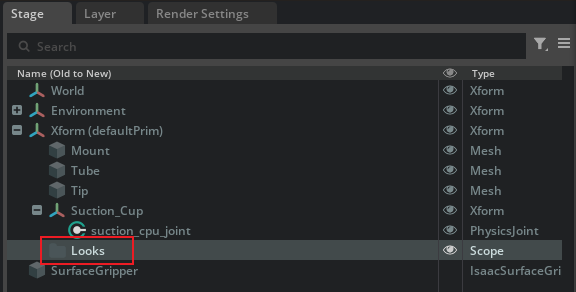
选中Xform,右键Create->Scope,创建一个Scope,命名为Looks。
-
选中Looks,右键Create->Material->USD Preview Surface,创建3个USD表面材质,分别命名为Mount_Surface、Tube_Surface和Tip_Surface。

-
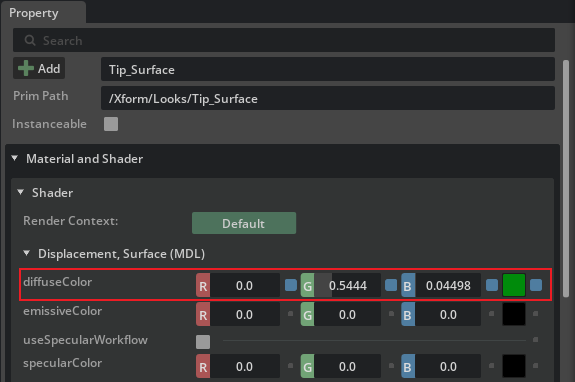
根据个人喜好,给每一个材质的Material and Shader->Displacement,Surface->DiffuseColor设置颜色。
-
分别给Mount、Tube和Tip三个Mesh设置对应的材质。

-
至此真空吸盘制作完成。
修正
需将Surface Gripper拖动到Xform节点下,前面漏掉了这一步。或者点击Xform右键创建Surface Gripper也可。
参考

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)