[具身智能-622]:高速图像传感器接口(视觉 / 摄像头)与数据格式
接口嵌入式 / 移动 →MIPI CSI-2超高速 / 高分辨率 →SLVS-EC工业长距 →数据格式算法 / 高画质 →RAW视频 / 显示 → YUV422 / YUV420真彩显示 →RGB888。
·
高速图像传感器(视觉 / 摄像头)的接口与数据格式,是连接传感器硬件与后端处理(ISP/SoC/FPGA,不是图像处理软件)的核心,直接决定带宽、帧率、距离、抗干扰与系统复杂度。后端处理芯片生产图像数据流。
一、主流高速图像传感器接口(硬件层)
1. DVP 并行接口(传统低速)
- 全称:Digital Video Port
- 信号:
- PCLK(像素时钟)、HSYNC(行同步)、VSYNC(场同步)
- DATA [7:0]/DATA [9:0]/DATA [11:0](并行数据)
- 速率:单时钟 ≤ 80MHz,带宽 ≤ 800Mbps(8bit)
- 特点:
- 单端、并行 → 线多、抗干扰差、距离短(<20cm)
- 已淘汰于高分辨率 / 高帧率,仅用于低端 / 旧方案
- 适用:低端监控、早期嵌入式、低分辨率
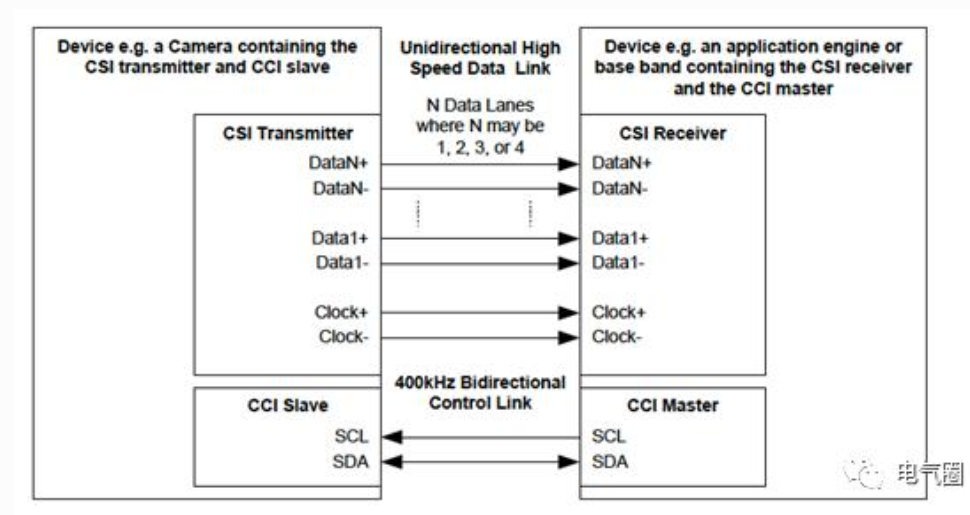
2. MIPI CSI-2(移动 / 嵌入式主流高速)
- 全称:Mobile Industry Processor Interface Camera Serial Interface 2
- 物理层:D-PHY(主流)、C-PHY(更高密度)
- 结构:
- 1× Clock Lane + 1/2/4× Data Lane
- 两种模式:
- LP(Low-Power):10MHz,控制 / 配置(I2C 替代)
- HS(High-Speed):80Mbps~1.5Gbps/lane(D-PHY v2.1)
- 总带宽:
- 4 Lane × 1.5Gbps = 6Gbps(实际有效~4.5Gbps)
- 特点:
- 差分、串行、少线、抗干扰强、功耗低
- 移动 / 手机 / 车载 / 机器人绝对主流
3. SLVS-EC(高端工业 / 高速传感器,索尼主推)
- 全称:Scalable Low-Voltage Signaling with Embedded Clock
- 速率:12.5Gbps/lane(v3.0),多 Lane 聚合可达60Gbps+
- 关键:时钟内嵌(无需独立 Clock Lane),长距更稳、抗偏斜强
- 适用:8K/16K、高帧率(1000fps+)、工业 / 科研 / 高端车载
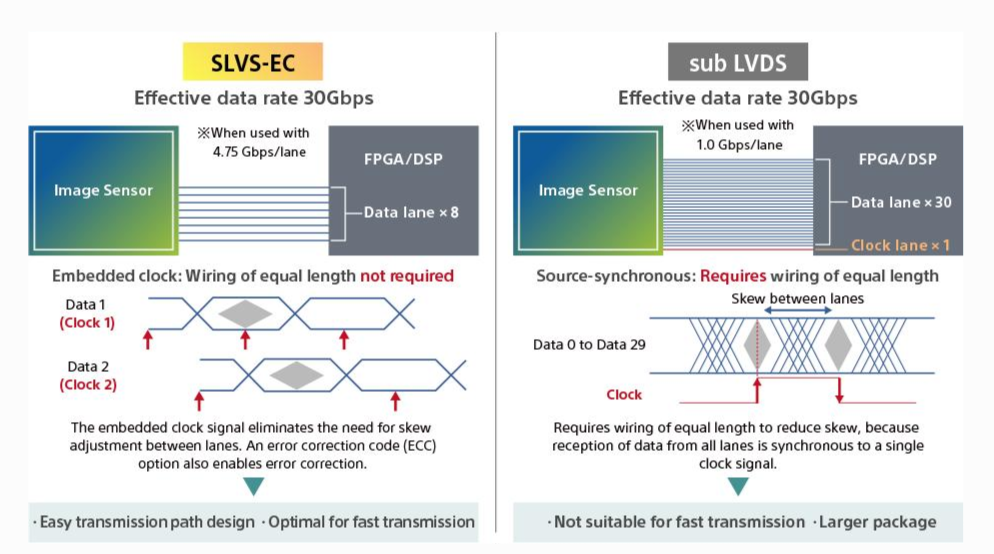
4. Sub-LVDS / LVDS(传统工业 / 多通道并行)
- 早期高速并行差分,线多(8~24 对)、带宽有限(≤3Gbps)
- 逐步被 MIPI CSI-2 / SLVS-EC / CoaXPress 替代
5. 工业级外部高速接口(相机→主机)
- CoaXPress(CXP):同轴线,12.5Gbps / 线,100m+,供电 + 控制 + 数据一体
- GigE Vision:千兆网,100m,标准以太网,多相机组网
- USB3 Vision:USB3.0/3.1,5Gbps,即插即用,短距
- 10GigE Vision:万兆网,10Gbps,长距工业
接口对比简表
表格
| 接口 | 最大带宽 | 距离 | 线数 | 主流场景 |
|---|---|---|---|---|
| DVP | ≤800Mbps | <20cm | 多 | 低端旧设备 |
| MIPI CSI-2 | 4.5Gbps | <1m | 少(5~10 线) | 手机 / 车载 / 嵌入式 |
| SLVS-EC | 60Gbps+ | 数米~10 米 | 极少 | 8K / 高帧工业 |
| CoaXPress | 12.5Gbps / 线 | 100m+ | 1 根同轴线 | 机器视觉 |
| GigE Vision | 1Gbps/10Gbps | 100m+ | 网线 | 长距组网 |
二、图像传感器数据格式(像素层)
传感器输出分为:原始 RAW 数据 → ISP 处理 → YUV/RGB/JPEG
1. RAW 格式(传感器原生输出,最重要)
- 本质:每个像素只测 单通道光强(R/G/B/W 之一)
- Bayer 阵列(彩色传感器标准):
- 2×2 单元:GRBG / BGGR / RGGB / GBRG
- G 占 50%(人眼对绿光最敏感)
- 位深:
- RAW8 / RAW10 / RAW12 / RAW14 / RAW16
- 例:RAW12 = 每像素 12bit,动态范围更高、噪声更低
- 特点:
- 无插值、无压缩、保留全部光电信息
- 必须经 Demosaic(去马赛克) 才显彩色
- 适用:工业检测、自动驾驶、高画质摄影、算法预处理
2. YUV 格式(亮度 + 色度分离,ISP 常用)
- Y:亮度(Luma)
- U/V:色度(Chroma)
- 主流子格式:
- YUV422(YUYV / UYVY):2 像素共享 1 组 UV → 2×16bit=32bit → 16bit / 像素
- YUV420(I420 / NV12):4 像素共享 1 组 UV → 12bit / 像素(Android / 视频标准)
- 特点:
- 带宽比 RGB 小、人眼感知质量损失小
- 视频编码 / 传输 / 嵌入式显示首选
3. RGB 格式(真彩色,每个像素全通道)
- RGB565:R5+G6+B5 → 16bit / 像素(低质 / 低带宽)
- RGB888(RGB24):R8+G8+B8 → 24bit / 像素(PC / 显示)
- RGBA8888(RGB32):+8bit 透明度 → 32bit / 像素
- 特点:
- 直观、直接显示,但带宽大
- 一般由 ISP 从 RAW/YUV 转换而来
4. 压缩格式(片内编码)
- JPEG:硬件 JPEG 引擎,直接出压缩图
- H.264/H.265:高端 sensor/ISP 内置,适合视频存储 / 传输
格式数据流(典型链路)
plaintext
光电信号 → ADC → RAW Bayer → (ISP) → Demosaic → 白平衡/伽马 → YUV422 → 编码/显示
↓
RGB888
三、高速接口与数据格式的匹配(带宽计算示例)
公式:所需带宽 = 分辨率 × 帧率 × 位深 × 压缩系数
-
例 1:4K@30fps RAW12
- 3840×2160 × 30 × 12bit ≈ 2.98Gbps
- → 需 MIPI 4-lane 或 SLVS-EC 1-lane
-
例 2:1080p@120fps YUV422
- 1920×1080 × 120 × 16bit ≈ 3.98Gbps
- → 需 MIPI 4-lane
-
例 3:8K@60fps RAW16
- 7680×4320 × 60 × 16bit ≈ 32Gbps
- → 只能用 SLVS-EC 多 lane
四、一句话总结
- 接口:
- 嵌入式 / 移动 → MIPI CSI-2
- 超高速 / 高分辨率 → SLVS-EC
- 工业长距 → CoaXPress / GigE Vision
- 数据格式:
- 算法 / 高画质 → RAW
- 视频 / 显示 → YUV422 / YUV420
- 真彩显示 → RGB888

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 3
3 0
0- 0



 已为社区贡献48条内容
已为社区贡献48条内容

所有评论(0)