LeetCode 2069. 模拟行走机器人 II【分类讨论】中等
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章中,我不仅会讲解多种解题思路及其优化,还会用多种编程语言实现题解,涉及到通用解法时更将归纳总结出相应的算法模板。
为了方便在PC上运行调试、分享代码文件,我还建立了相关的仓库:https://github.com/memcpy0/LeetCode-Conquest。在这一仓库中,你不仅可以看到LeetCode原题链接、题解代码、题解文章链接、同类题目归纳、通用解法总结等,还可以看到原题出现频率和相关企业等重要信息。如果有其他优选题解,还可以一同分享给他人。
由于本系列文章的内容随时可能发生更新变动,欢迎关注和收藏征服LeetCode系列文章目录一文以作备忘。
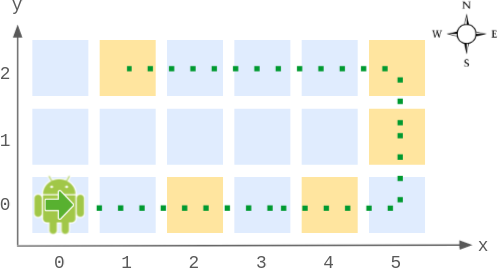
给你一个在 XY 平面上的 width x height 的网格图,左下角 的格子为 (0, 0) ,右上角 的格子为 (width - 1, height - 1) 。网格图中相邻格子为四个基本方向之一("North","East","South" 和 "West")。一个机器人 初始 在格子 (0, 0) ,方向为 "East" 。
机器人可以根据指令移动指定的 步数 。每一步,它可以执行以下操作。
- 沿着当前方向尝试 往前一步 。
- 如果机器人下一步将到达的格子 超出了边界 ,机器人会 逆时针 转 90 度,然后再尝试往前一步。
如果机器人完成了指令要求的移动步数,它将停止移动并等待下一个指令。
请你实现 Robot 类:
Robot(int width, int height)初始化一个width x height的网格图,机器人初始在(0, 0),方向朝"East"。void step(int num)给机器人下达前进num步的指令。int[] getPos()返回机器人当前所处的格子位置,用一个长度为 2 的数组[x, y]表示。String getDir()返回当前机器人的朝向,为"North","East","South"或者"West"。
示例 1:
输入:
["Robot", "step", "step", "getPos", "getDir", "step", "step", "step", "getPos", "getDir"]
[[6, 3], [2], [2], [], [], [2], [1], [4], [], []]
输出:
[null, null, null, [4, 0], "East", null, null, null, [1, 2], "West"]
解释:
Robot robot = new Robot(6, 3); // 初始化网格图,机器人在 (0, 0) ,朝东。
robot.step(2); // 机器人朝东移动 2 步,到达 (2, 0) ,并朝东。
robot.step(2); // 机器人朝东移动 2 步,到达 (4, 0) ,并朝东。
robot.getPos(); // 返回 [4, 0]
robot.getDir(); // 返回 "East"
robot.step(2); // 朝东移动 1 步到达 (5, 0) ,并朝东。
// 下一步继续往东移动将出界,所以逆时针转变方向朝北。
// 然后,往北移动 1 步到达 (5, 1) ,并朝北。
robot.step(1); // 朝北移动 1 步到达 (5, 2) ,并朝 **北** (不是朝西)。
robot.step(4); // 下一步继续往北移动将出界,所以逆时针转变方向朝西。
// 然后,移动 4 步到 (1, 2) ,并朝西。
robot.getPos(); // 返回 [1, 2]
robot.getDir(); // 返回 "West"
提示:
2 <= width, height <= 1001 <= num <= 10^5step,getPos和getDir总共 调用次数不超过10^4次。
解法 分类讨论, O ( 1 ) O(1) O(1) 时间复杂度
下面将 w i d t h width width 简称为 w w w ,把 h e i g h t height height 简称为 h h h 。
根据题意,机器人只能在网格图的最外圈中移动,移动一整圈需要 2 ( w + h − 2 ) 2(w + h- 2) 2(w+h−2) 步。
为什么只能在最外圈移动呢?很简单,机器人初始在 ( 0 , 0 ) (0, 0) (0,0) ,方向向东,机器人无法自己改变方向,只能在越界时逆向转 90 ° 90\degree 90° 才能改变方向,也就是说机器人必然在最外圈中移动!
设当前移动的总步数模 2 ( w + h − 2 ) 2(w +h - 2) 2(w+h−2) 的结果为 s s s 。分类讨论:
- 如果 s < w s<w s<w ,机器人向右走了 s s s 步,位于 ( s , 0 ) (s, 0) (s,0) ,面朝东。
- 如果 w ≤ s < w + h − 1 w\le s < w+h-1 w≤s<w+h−1 ,机器人先向右走 w − 1 w-1 w−1 步,再往北走 s − ( w − 1 ) s - (w - 1) s−(w−1) 步,位于 ( w − 1 , s − w + 1 ) (w - 1, s-w+1) (w−1,s−w+1) ,面朝北。
- 如果 w + h − 1 ≤ s < 2 w + h − 2 w +h - 1 \le s < 2w+h-2 w+h−1≤s<2w+h−2 ,机器人先向右走 w − 1 w -1 w−1 步,再往北走 h − 1 h -1 h−1 步,到达右上角 ( w − 1 , h − 1 ) (w-1,h-1) (w−1,h−1) ,再往西走 s − ( w − 1 ) − ( h − 1 ) s - (w - 1) - (h - 1) s−(w−1)−(h−1) 步,位于 ( w − 1 − ( s − ( w − 1 ) − ( h − 1 ) ) , h − 1 ) = ( 2 w + h − s − 3 , h − 1 ) (w - 1 - (s - (w - 1) - (h - 1)), h - 1) = (2w + h - s - 3, h - 1) (w−1−(s−(w−1)−(h−1)),h−1)=(2w+h−s−3,h−1) ,面朝西。
- 否则,机器人先向右走 w − 1 w - 1 w−1 步,再往北走 h − 1 h - 1 h−1 步,再往西走 w − 1 w - 1 w−1 步,到达左上角 ( 0 , h − 1 ) (0, h -1) (0,h−1) ,再往南走 s − 2 ( w − 1 ) − ( h − 1 ) s - 2(w - 1)- (h-1) s−2(w−1)−(h−1) 步,位于 ( 0 , h − 1 − ( s − 2 ( w − 1 ) − ( h − 1 ) ) ) = ( 0 , 2 ( w + h ) − s − 4 ) (0, h - 1 - ( s - 2(w - 1) - (h - 1))) = (0, 2(w + h) - s - 4) (0,h−1−(s−2(w−1)−(h−1)))=(0,2(w+h)−s−4) ,面朝南。
注意:总步数为 0 0 0 时,机器人面朝东,但总步数为 2 ( w + h − 2 ) 2(w + h - 2) 2(w+h−2) 的正整数倍时,机器人面朝南。需要特判总步数为 0 0 0 的特殊情况嘛?不需要,当总步数大于 0 0 0 时,我们可把取模后的范围从 [ 0 , 2 ( w + h − 2 ) − 1 ] [0, 2(w + h - 2) - 1] [0,2(w+h−2)−1] 调整到 [ 1 , 2 ( w + h − 2 ) ] [1, 2(w+h-2)] [1,2(w+h−2)] ,从而使原先模为 0 0 0 的总步数变为 2 ( w + h − 2 ) 2(w+h-2) 2(w+h−2) ,落入面朝南的分支中,这样就可以避免特判了。
class Robot {
private int w, h, s;
public Robot(int width, int height) {
w = width;
h = height;
s = 0;
}
public void step(int num) {
// 由于机器人只能走外圈,那么走 (w+h-2)*2 步后会回到起点
// 把 s 取模调整到 [1, (w+h-2)*2],这样不需要特判 s == 0 时的方向
s = (s + num - 1) % ((w + h - 2) * 2) + 1;
}
public int[] getPos() {
Object[] t = getState();
return new int[]{(int) t[0], (int) t[1]};
}
public String getDir() {
Object[] t = getState();
return (String) t[2];
}
private Object[] getState() {
if (s < w) {
return new Object[]{s, 0, "East"};
} else if (s < w + h - 1) {
return new Object[]{w - 1, s - w + 1, "North"};
} else if (s < w * 2 + h - 2) {
return new Object[]{w * 2 + h - s - 3, h - 1, "West"};
} else {
return new Object[]{0, (w + h) * 2 - s - 4, "South"};
}
}
}
class Robot {
int w;
int h;
int s = 0;
tuple<int, int, string> getState() {
if (s < w) {
return {s, 0, "East"};
} else if (s < w + h - 1) {
return {w - 1, s - w + 1, "North"};
} else if (s < w * 2 + h - 2) {
return {w * 2 + h - s - 3, h - 1, "West"};
} else {
return {0, (w + h) * 2 - s - 4, "South"};
}
}
public:
Robot(int width, int height) : w(width), h(height) {}
void step(int num) {
// 由于机器人只能走外圈,那么走 (w+h-2)*2 步后会回到起点
// 把 s 取模调整到 [1, (w+h-2)*2],这样不需要特判 s == 0 时的方向
s = (s + num - 1) % ((w + h - 2) * 2) + 1;
}
vector<int> getPos() {
auto [x, y, _] = getState();
return {x, y};
}
string getDir() {
return get<2>(getState());
}
};
class Robot:
def __init__(self, width: int, height: int) -> None:
self.w = width
self.h = height
self.s = 0
def step(self, num: int) -> None:
# 由于机器人只能走外圈,那么走 (w+h-2)*2 步后会回到起点
# 把 s 取模调整到 [1, (w+h-2)*2],这样不需要特判 s == 0 时的方向
self.s = (self.s + num - 1) % ((self.w + self.h - 2) * 2) + 1
def _getState(self) -> Tuple[int, int, str]:
w, h, s = self.w, self.h, self.s
if s < w:
return s, 0, "East"
if s < w + h - 1:
return w - 1, s - w + 1, "North"
if s < w * 2 + h - 2:
return w * 2 + h - s - 3, h - 1, "West"
return 0, (w + h) * 2 - s - 4, "South"
def getPos(self) -> List[int]:
x, y, _ = self._getState()
return [x, y]
def getDir(self) -> str:
return self._getState()[2]
struct Robot {
w: i32,
h: i32,
s: i32,
}
impl Robot {
fn new(width: i32, height: i32) -> Self {
Self { w: width, h: height, s: 0 }
}
fn step(&mut self, num: i32) {
// 由于机器人只能走外圈,那么走 (w+h-2)*2 步后会回到起点
// 把 s 取模调整到 [1, (w+h-2)*2],这样不需要特判 s == 0 时的方向
self.s = (self.s + num - 1) % ((self.w + self.h - 2) * 2) + 1;
}
fn get_state(&self) -> (i32, i32, String) {
let w = self.w;
let h = self.h;
let s = self.s;
if s < w {
(s, 0, "East".to_string())
} else if s < w + h - 1 {
(w - 1, s - w + 1, "North".to_string())
} else if s < w * 2 + h - 2 {
(w * 2 + h - s - 3, h - 1, "West".to_string())
} else {
(0, (w + h) * 2 - s - 4, "South".to_string())
}
}
fn get_pos(&self) -> Vec<i32> {
let (x, y, _) = self.get_state();
vec![x, y]
}
fn get_dir(&self) -> String {
let (_, _, d) = self.get_state();
d
}
}
type Robot struct {
w, h, step int
}
func Constructor(width, height int) Robot {
return Robot{width, height, 0}
}
func (r *Robot) Step(num int) {
// 由于机器人只能走外圈,那么走 (w+h-2)*2 步后会回到起点
// 把 step 取模调整到 [1, (w+h-2)*2],这样不需要特判 step == 0 时的方向
r.step = (r.step+num-1)%((r.w+r.h-2)*2) + 1
}
func (r *Robot) getState() (x, y int, dir string) {
w, h, step := r.w, r.h, r.step
switch {
case step < w:
return step, 0, "East"
case step < w+h-1:
return w - 1, step - w + 1, "North"
case step < w*2+h-2:
return w*2 + h - step - 3, h - 1, "West"
default:
return 0, (w+h)*2 - step - 4, "South"
}
}
func (r *Robot) GetPos() []int {
x, y, _ := r.getState()
return []int{x, y}
}
func (r *Robot) GetDir() string {
_, _, d := r.getState()
return d
}
var Robot = function(width, height) {
this.w = width;
this.h = height;
this.s = 0;
};
Robot.prototype.step = function(num) {
// 由于机器人只能走外圈,那么走 (w+h-2)*2 步后会回到起点
// 把 s 取模调整到 [1, (w+h-2)*2],这样不需要特判 s === 0 时的方向
this.s = (this.s + num - 1) % ((this.w + this.h - 2) * 2) + 1;
};
Robot.prototype.getState = function() {
const w = this.w, h = this.h, s = this.s;
if (s < w) {
return [s, 0, "East"];
} else if (s < w + h - 1) {
return [w - 1, s - w + 1, "North"];
} else if (s < w * 2 + h - 2) {
return [w * 2 + h - s - 3, h - 1, "West"];
} else {
return [0, (w + h) * 2 - s - 4, "South"];
}
};
Robot.prototype.getPos = function() {
const [x, y, _] = this.getState();
return [x, y];
};
Robot.prototype.getDir = function() {
return this.getState()[2];
};
typedef struct {
int w;
int h;
int s;
} Robot;
Robot* robotCreate(int width, int height) {
Robot* r = malloc(sizeof(Robot));
r->w = width;
r->h = height;
r->s = 0;
return r;
}
void robotStep(Robot* r, int num) {
// 由于机器人只能走外圈,那么走 (w+h-2)*2 步后会回到起点
// 把 s 取模调整到 [1, (w+h-2)*2],这样不需要特判 s == 0 时的方向
r->s = (r->s + num - 1) % ((r->w + r->h - 2) * 2) + 1;
}
int* robotGetPos(Robot* r, int* returnSize) {
int w = r->w, h = r->h, s = r->s;
int x, y;
if (s < w) {
x = s;
y = 0;
} else if (s < w + h - 1) {
x = w - 1;
y = s - w + 1;
} else if (s < w * 2 + h - 2) {
x = w * 2 + h - s - 3;
y = h - 1;
} else {
x = 0;
y = (w + h) * 2 - s - 4;
}
int* ans = malloc(2 * sizeof(int));
*returnSize = 2;
ans[0] = x;
ans[1] = y;
return ans;
}
char* robotGetDir(Robot* r) {
int w = r->w, h = r->h, s = r->s;
if (s < w) {
return "East";
} else if (s < w + h - 1) {
return "North";
} else if (s < w * 2 + h - 2) {
return "West";
} else {
return "South";
}
}
void robotFree(Robot* r) {
free(r);
}
复杂度分析:
- 时间复杂度:都是 O ( 1 ) O(1) O(1) 。
- 空间复杂度: O ( 1 ) O(1) O(1) 。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)