具身智能中的传感器技术22——六维力/力矩传感器0
本文对比分析了六维力/力矩传感器和关节力矩传感器的核心差异。关节力矩传感器安装在关节内部,测量一维扭矩,主要用于全身力控和柔顺动作;六维力传感器安装在肢体末端,测量六维力/力矩,用于精密操作和环境交互。两者在机器人控制中各司其职:关节力矩传感器解决"内忧"(协调全身动作),六维力传感器应对"外患"(处理外部接触)。高端机器人通常协同使用两者,关节传感器实现自
·
本文对比分析了六维力/力矩传感器和关节力矩传感器的核心差异。关节力矩传感器安装在关节内部,测量一维扭矩,主要用于全身力控和柔顺动作;六维力传感器安装在肢体末端,测量六维力/力矩,用于精密操作和环境交互。两者在机器人控制中各司其职:关节力矩传感器解决"内忧"(协调全身动作),六维力传感器应对"外患"(处理外部接触)。高端机器人通常协同使用两者,关节传感器实现自然运动,六维力传感器完成精细操作,共同实现安全、柔顺的智能控制。
六维力/力矩传感器 vs 关节力矩传感器
这两种传感器都带个“力”字,也都是具身智能机器人实现柔顺控制的关键硬件,但它们在安装位置、测量维度、功能定位上有着本质的区别。
简单来说:关节力矩传感器是机器人的“肌肉感受器”,六维力传感器是机器人的“手腕/脚腕神经”。
以下是深度对比分析:
一、 核心差异对比表
| 维度 | 关节力矩传感器 (Joint Torque Sensor) | 六维力/力矩传感器 (F/T Sensor) |
|---|---|---|
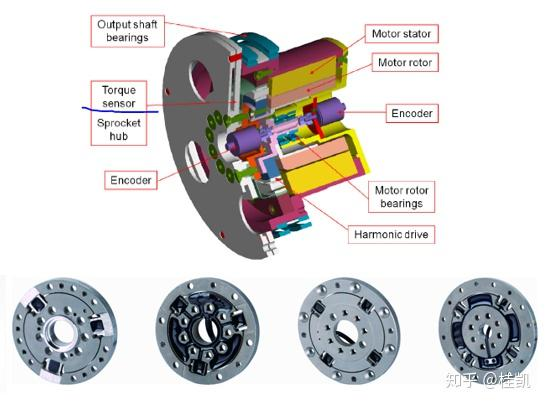
| 安装位置 | 关节内部 (减速器输出端) | 肢体末端 (手腕、脚腕) |
| 数量 | 多 (每个关节 1 个,全身 10-40 个) | 少 (全身 2-4 个) |
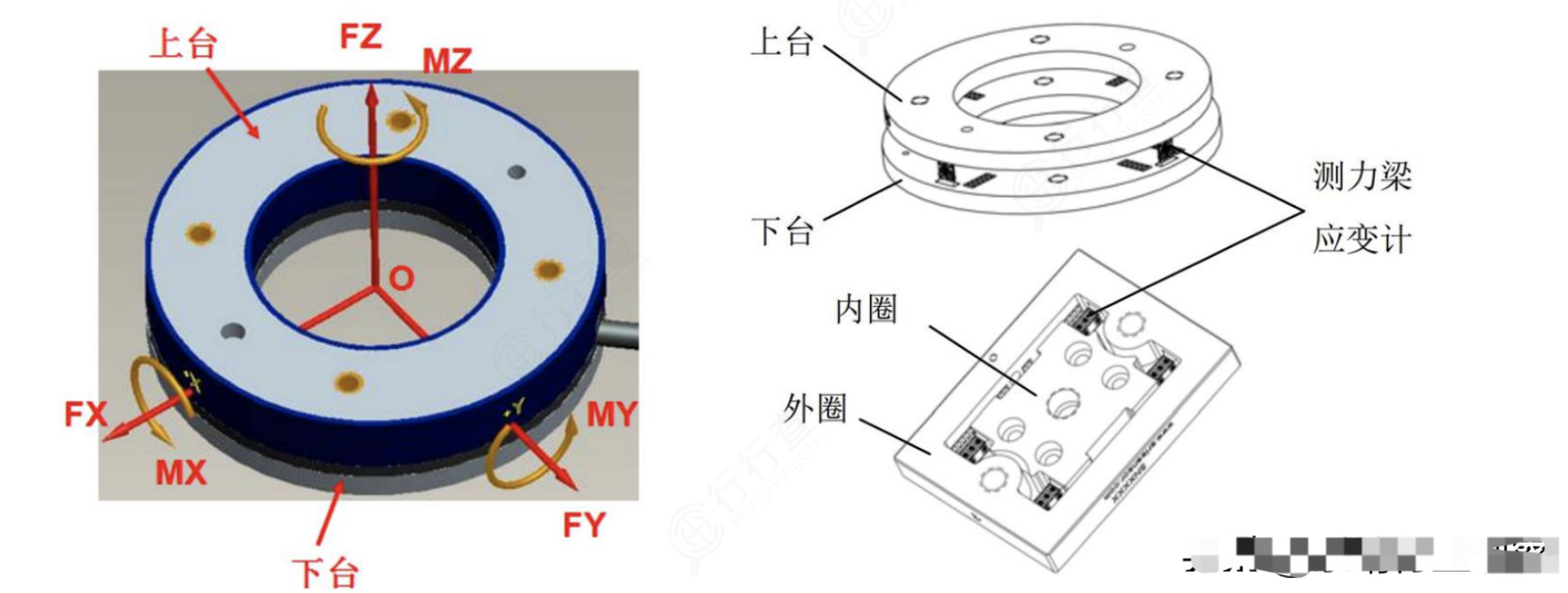
| 测量维度 | 1 维 (仅测量绕关节轴旋转的扭矩 ττ) | 6 维 (3 个力 Fx,Fy,FzFx,Fy,Fz + 3 个扭矩 Mx,My,MzMx,My,Mz) |
| 主要功能 | 全身力控、关节柔顺、碰撞检测 | 末端精密操作、双足平衡 (ZMP)、拖拽示教 |
| 感知范围 | 只能感知传递到该关节的力 | 能感知末端接触外界的所有复杂受力 |
| 成本 | 相对较低 (几百到几千元) | 极高 (几千到几万元) |
二、 深度解析:为什么需要两种?
1. 关节力矩传感器:解决“内忧” (全身协调)
- 任务: 它是为了让每一个关节都变得“听话”且“温柔”。
- 场景: 当机器人挥舞手臂时,手臂自身的重量(重力)和加减速产生的惯性力都会作用在关节上。
- 如果没有它,机器人只能傻乎乎地按轨迹走,僵硬无比。
- 有了它,控制算法可以算出:“哦,现在手臂受重力影响往下坠,我要多出点力托住它(重力补偿)”。
- 局限: 它是一维的。它分不清这是重力、离心力还是外界推力,它只知道“我很费劲”。
2. 六维力传感器:解决“外患” (环境交互)
- 任务: 它是为了精确感知机器人与外部世界(桌子、零件、地面)的接触状态。
- 场景 A (手腕):插孔装配。
- 当机器人拿着销子往孔里插时,如果歪了,销子会受到侧向力 (Fx/FyFx/Fy) 和翻转力矩 (Mx/MyMx/My)。
- 关节传感器测不到这些复杂的侧向力(因为被悬臂梁结构吸收了),只有手腕处的六维力传感器能解耦出这些分力,告诉机器人:“往左偏一点,再转一点”。
- 场景 B (脚腕):平衡控制。
- 机器人站在斜坡上,脚底受到的力是复杂的(不仅有支撑力,还有摩擦力,还有导致翻倒的力矩)。
- 六维力传感器能算出压力中心 (CoP)。如果 CoP 偏离脚掌中心,说明快倒了,必须马上调整姿态。
三、 协同工作模式 (The Collaboration)
在高端人形机器人(如 Tesla Optimus)中,通常是两者配合使用:
-
大范围动作 (关节力矩主导):
- 搬运箱子走过来。这时候靠全身的关节力矩传感器进行重力补偿和阻抗控制,让动作像人一样自然、柔顺,别像僵尸一样硬邦邦。
-
精细接触 (六维力主导):
- 把箱子轻轻放在桌子上。
- 当箱子底接触桌面的瞬间,手腕上的六维力传感器检测到 FzFz 突变,立刻告诉控制器:“碰到桌子了,停止下降,开启柔顺模式”。
总结
- 关节力矩传感器是基础:没有它,机器人就是刚性的机器,不安全。
- 六维力传感器是进阶:没有它,机器人干不了精细活,走不稳复杂路。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)