基于RobotStudio的工业机器人工作站建模与机械装置仿真全流程实战(创建机械模型)
摘要:
本文详细记录了使用ABB RobotStudio进行工业机器人工作站系统模型创建的完整过程。通过基础几何体建模、精准测量工具应用以及简易活塞机械装置的创建,深入探讨了离线编程中的核心逻辑与操作技巧。适合RobotStudio初学者及工业机器人专业学生参考。
关键词:RobotStudio, 离线编程, 机械装置, 仿真, 工业机器人
前言
大家好,最近我深入学习了工业机器人离线编程技术。在实际的工程应用中,我们往往面临现场调试时间长、风险高的问题,而“RobotStudio”作为ABB机器人的官方仿真软件,完美解决了这一痛点。
在搭建工作站的过程中,我们不仅需要构建场景,更需要赋予模型"生命"——即运动逻辑。本文将基于我的实际操作经验,带你一步步完成从静态建模到动态仿真的跨越,重点解析“建模功能”、“测量工具”以及“机械装置”的创建。
核心任务一:基础建模与场景构建
任何仿真都始于一个场景。虽然RobotStudio支持导入复杂的CAD模型,但掌握软件自带的“基础建模功能”对于快速搭建简易工装夹具至关重要。
1.1 创建基础几何体
在"建模"选项卡中,我们可以直接创建标准几何体,无需外部导入。操作路径为:建模 -> 固体 -> 圆柱体/矩形体。
实战参数方面,以创建一个支撑底座为例,设置半径300mm,高度500mm。在输入参数时,可以直接输入数学公式(如100*2),软件会自动计算。
1.2 模型属性与导出
创建完模型后,我们需要对其进行美化和归档。选中对象后,通过右键菜单可进行颜色修改(使其更符合现场实物)、移动(精确位置调整)以及显示设置。
为了实现资产复用,通过"导出几何体"功能,将做好的模型保存为.sat或.step格式,方便在其他项目中调用,建立自己的模型库。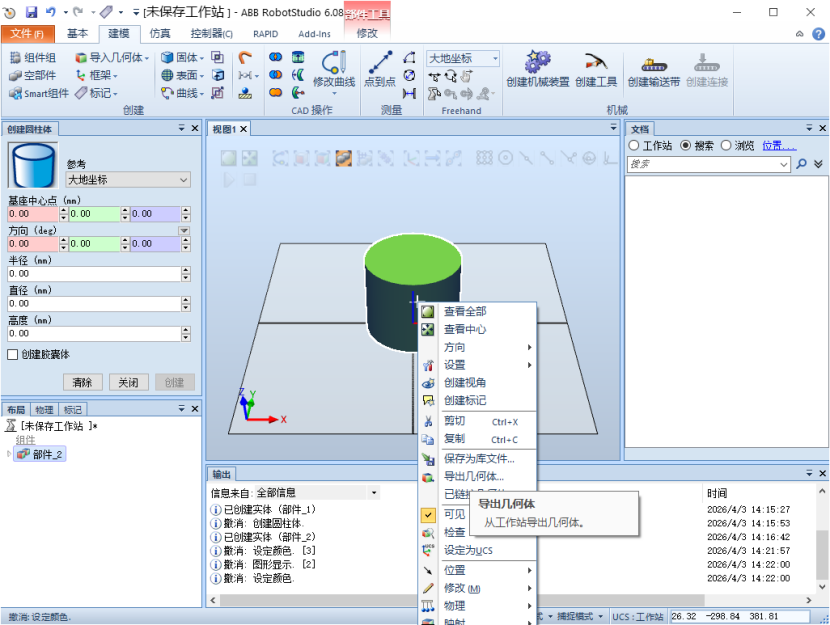
核心任务二:精准测量工具的应用
在仿真中,位置的准确性是程序运行的前提。很多时候,我们需要在没有坐标数据的情况下获取模型尺寸或距离,这时“测量工具”就显得尤为重要。
2.1 测量工具功能详解
点到点测量用于测量长方体的长宽高,需要开启"捕捉末端"以确保选中顶点。直径测量用于测量圆柱/圆孔大小,需在圆周上选取3个点确定圆心。角度测量用于测量锥体或倾斜面角度,依次选取角的两边及顶点(A-B-C)。最短距离测量用于检查两物体间是否干涉,直接选择两个部件,自动计算最小间隙。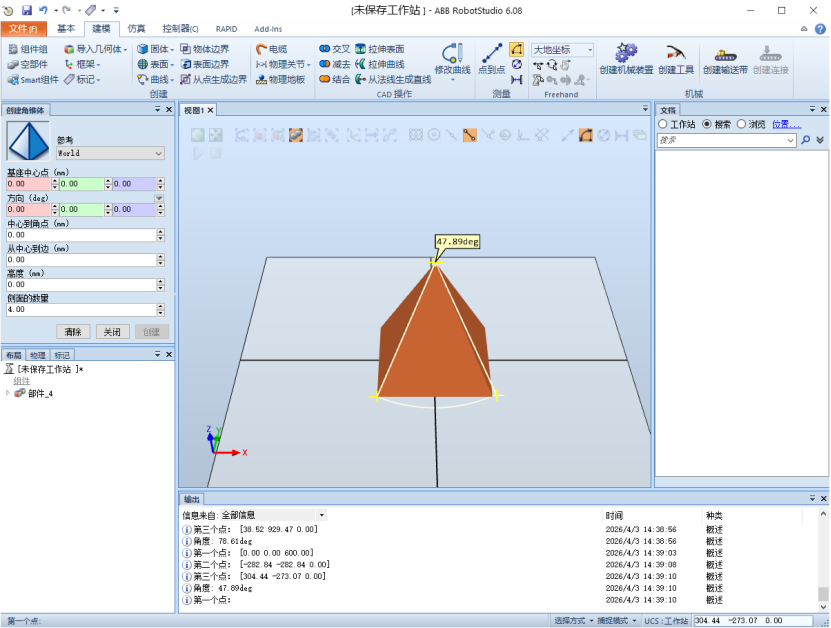
2.2 实战感悟
在测量圆柱直径时,我发现如果直接点击圆柱侧面,有时难以选中圆心。最佳实践是利用"捕捉边缘"功能,手动选取圆周上的三个点,这样测量结果更直观、准确。这对于后续机器人TCP路径的规划非常有帮助。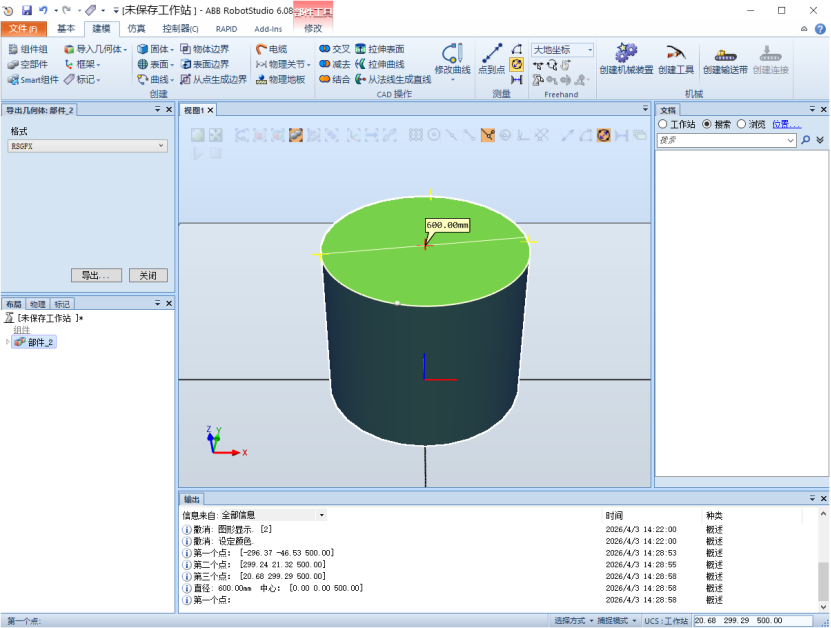
核心任务三:机械装置的逻辑构建
这是本次学习中难度最大,但也最能体现 RobotStudio 核心价值的部分。静态的模型只能展示外观,而机械装置则赋予了模型物理运动特性。为了深入掌握这一功能,我以“简易活塞”为例,完成了从建模到调试的全过程。
3.1 创建活塞与套筒组件
1.创建活塞杆
点击“建模”选项卡,选择“固体”→“圆柱体”,设置直径 40mm、高度 500mm,点击“创建”。
2.创建活塞头
再次点击“圆柱体”工具,设置直径 200mm、高度 40mm,点击“创建”。
3.装配对齐
选中活塞杆,点击右键选择“设置放置位置”,选择“一点”对齐方式,开启“捕捉中心”,先点击活塞杆底面圆心,再点击活塞头上表面圆心,确认对齐。
4.合并组件
按住 Ctrl 键同时选中活塞杆和活塞头,点击“建模”选项卡中的“结合”,将两者合并为一个组件。
5.创建空心套筒
点击“圆柱体”工具,分别创建直径 240mm 的外套筒和直径 200mm 的内套筒。
选中内套筒作为“刀具”,按住 Ctrl 键同时选中外套筒作为“目标”,点击“建模”选项卡中的“布尔”→“减去”,形成空心套筒。
3.2 定义机械装置与链接
1.启动创建向导
点击“建模”选项卡下的“创建机械装置”,在弹出的对话框中选择装置类型为“设备”,点击“下一步”。
2.定义基座链接
点击“新建链接”,在“链接名称”中输入“BaseLink”,在“几何体”中选择“套筒”,勾选“设置为 BaseLink”,点击“添加”。
3.定义运动部件
再次点击“新建链接”,在“链接名称”中输入“MovingPart”,在“几何体”中选择“活塞组件”,点击“添加”。
3.3 设置关节与运动参数
-
新建关节
点击“新建关节”,在“关节名称”中输入“PrismaticJoint”,在“关节类型”中选择“往复的”。 -
设置运动范围
在“关节轴”中选择“Z 轴”,设置“最小值”为 0mm,“最大值”为 900mm,“初始值”为 0mm。 -
定义关节方向
点击“捕捉”工具,选择活塞中心轴线的两个端点,确保运动方向与 Z 轴平行。
3.4 编译、姿态与调试
-
编译装置
点击“编译机械装置”,等待系统检查逻辑错误,显示“编译成功”后继续。 -
添加缩回姿态
点击“新建姿态”,在“姿态名称”中输入“Retracted”,设置关节值为 20mm,点击“添加”。 -
添加伸出姿态
再次点击“新建姿态”,在“姿态名称”中输入“Extended”,设置关节值为 300mm,点击“添加”。 -
设置运动时间
在“姿态转换”中选择“Retracted”到“Extended”,设置转换时间为 3 秒。 -
手动测试
点击顶部菜单栏的“Freehand”,选择“手动关节”模式,在关节控制面板中找到“PrismaticJoint”,拖动滚动条从 0mm 到 300mm,观察活塞在套筒内的运动是否平滑。
学习收获与感悟
通过这次对RobotStudio建模与仿真的深入学习,我有以下几点深刻的体会:
坐标系是灵魂:无论是建模时的对齐,还是测量时的捕捉,亦或是机械装置的定义,都离不开精准的坐标系(Coordinate System)。掌握WCS(世界坐标系)与UCS(用户坐标系)的切换,是高效操作的前提。
逻辑思维的转变:从静态模型到动态机械装置,不仅仅是操作软件,更是在模拟物理世界。理解BaseLink(固定件)与Moving Parts(运动件)的关系,是解决复杂机构仿真的金钥匙。
工具服务于工程:RobotStudio的强大不仅在于画图,更在于验证。通过测量工具,我们可以在虚拟环境中提前发现干涉问题;通过机械装置,我们可以模拟真实的气缸、输送带动作,从而在投产前完成90%的程序调试。
结语:
工业机器人的离线编程是一门艺术,它将数学、物理与工程实践完美结合。希望这篇基于实战的教程能为正在学习RobotStudio的你提供一些思路。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 7
7 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)