清华远见人工智能模拟仿真教培学习摘录
说明清华远见的人工智能、具身智能、智能交通相关的模拟仿真及其项目开发应用与学习提升。

1 具身机器人/嵌入式教学实验平台
1.1 嵌入式虚拟仿真系统(FS_EMBSIM)
提供完整的嵌入式虚拟仿真解决方案:在嵌入式Linux方面,支持内核态与用户态程序调试,通过断点设置、单步执行、寄存器与内存查看等功能,直观呈现内部数据,显著降低u-boot与Linux内核的教学门槛;在嵌入式STM32仿真方面,全面覆盖从项目管理、处理器内核与外设仿真,到原理图与PCB线路应用、3D电路板与场景仿真,并支持流程图编程、HAL库源码仿真、多类RTOS与UI框架,还可依托智能赛车、机械臂等综合场景开展项目实践。

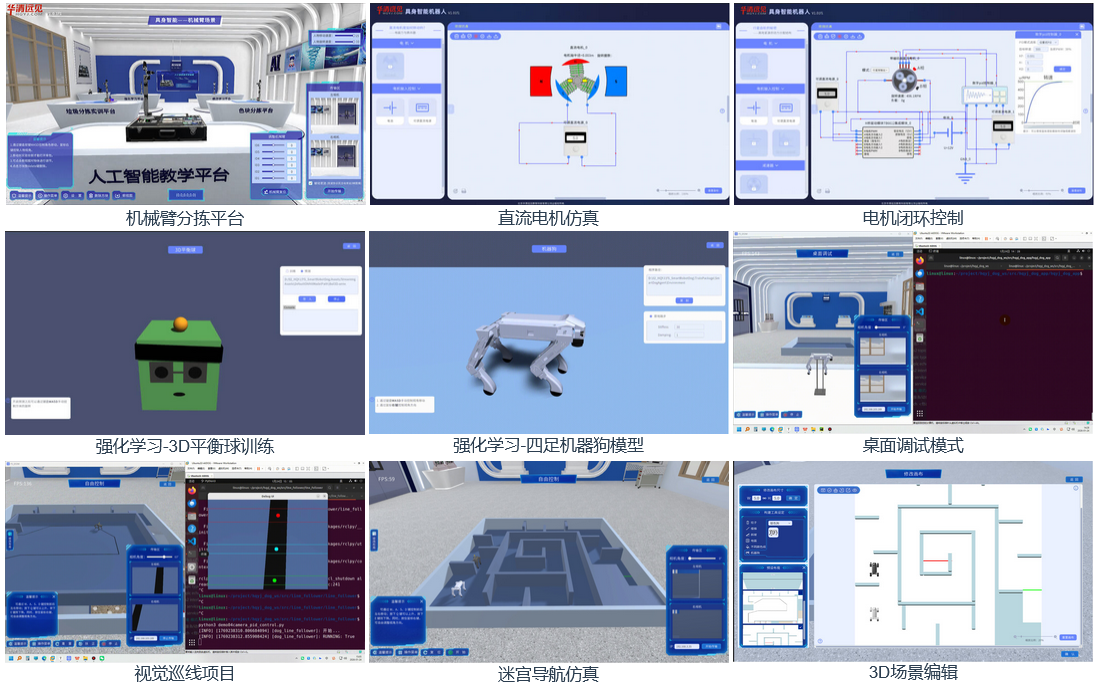
1.2 具身机器人虚拟仿真系统(FS_EISIM)
本系统面向高校工科与K12科技教育,构建了一套覆盖机电基础、机器人运动学、智能控制到具身智能的全链条虚拟仿真平台。系统采用“双层架构”:第一层为可视化认知层,通过2D/3D动态动画、实时物理模拟与曲线可视化,直观展示多种电机与减速器的运行机理与力学特性,并解析机器人运动学、路径规划等算法的几何与数学逻辑;第二层为机器人仿真实验层,基于URDF模型集成物理引擎与可编程接口,支持关节控制、轨迹规划、PID/力控及具身智能行为训练,实现高度仿真的机器人操作体验。
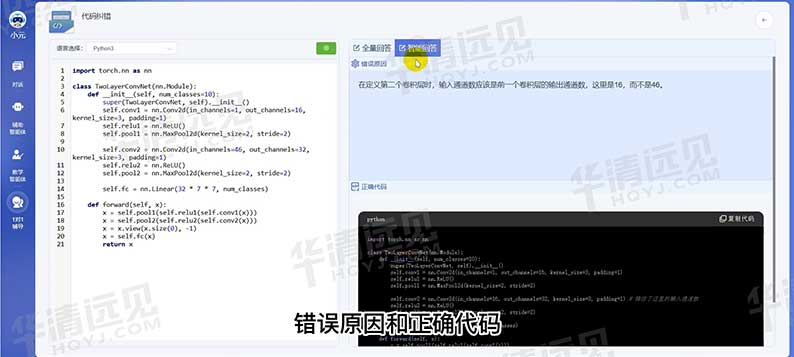
1.3 AI智能助教(FS_AITC)
本平台是一款集成了多种大模型能力的专业级人工智能助教系统,面向高校、企业及开发者,提供从智能对话、多元化辅助智能体、专业级教学智能体到1V1个性化教学的全方位支持。系统核心优势在于其丰富的智能体生态,无论是文本处理、代码开发、跨语言翻译,还是个性化教学和技术辅导,平台都能提供精准的服务。同时,平台支持本地化部署,能兼容从小规模(1.5B参数)到超大规模(上百B参数)的大型模型,且提供模块化架构与扩展性,为用户提供灵活、精准且高效稳定的智能助教服务。
1.4 AI测评中心(FS_AIGEM)
本系统是一款基于大模型的智能化学习测评平台,主要面向高校学生及求职者,旨在通过“学-测-评-练”闭环高效提升其专业知识与就业竞争力。平台核心优势在于集成了全栈知识点题库、多模式练习与模拟考试,并利用AI技术实现智能判卷与个性化反馈;错题集生成,实现查缺补漏重点复习。特别提供的AI模拟笔试与面试功能,能精准帮助学生熟悉实战流程、优化应试表现,结合全面的学习进度追踪与数据分析,为学员实现精准、高效的能力提升与求职准备。

1.5 人工智能机器狗开发套件(FS_AIDOG)
12舵机高精度仿生运动ROS机器狗,是专为AI全栈技术与具身智能打造的一体化教学实验平台。它深度整合多模态传感器、高性能AI 运算单元、主流 AI 框架及精准执行器、内置核心算法、聚焦 “多模块协同” 核心技术。技术支持中高阶的具身智能(自主移动机器人、工业机械臂、具身智能机器人)全栈式开发实践,硬件模块可扩展,代码全开源,更配套完整教学资源。

1.6 数字孪生嵌入式综合实验箱(FS_EMBDT)
实验箱与嵌入式虚拟仿真系统共同构建了数字孪生体系。在该体系中,虚拟仿真系统作为实体硬件的数字化镜像,形成虚实融合的实验环境。仿真系统中对应硬件资源的实验也可以运行在实验箱上,具有相同的实验现象。

2 具身机器人课程大纲
2.1 机器狗技术架构与应用通信开发
学习目标
1. 理解四足机器狗的软硬件系统架构,能清晰描述其感知、决策、执行三层结构及各模块功能; 2. 掌握MQTT通信协议的基本原理与典型应用场景,能够基于MQTT实现与机器狗的数据交互; 3. 实践基于MQTT的机器狗多模态传感器数据获取(双目图像、雷达点云、IMU、电池状态); 4. 完成机器狗开发环境搭建(Ubuntu + ROS2 + SDK)及基础通信实验。
技术+实验课程(上)
1开场介绍与开班注意事项
2机器狗硬件组成
3机器狗软件栈
4机器狗通信架构
5基础运动
6传感器数据实时可视化
技术课程(下)
1Ubuntu22.04+ROS2 Humble安装
4MQTT 协议基础:Broker/Client、Topic、QoS
2机器狗 SDK 安装与连接测试
5通过 MQTT 控制机器狗动作
3虚拟仿真平台介绍
6订阅传感器
2.2 DDS底层通信与ROS2核心开发
学习目标
1. 理解DDS与ROS2的核心概念(节点、话题、服务、参数)及其在机器人系统中的作用; 2. 掌握在虚拟仿真中构建的3D仿真场景的方法,并使用机器狗模型进行仿真测试; 3. 实践基于双目视觉开发简单巡线功能(图像处理 + 控制反馈),并在仿真环境中验证; 4. 能够创建ROS2功能包、编写发布/订阅节点、定义自定义消息类型,并实现与ROS2的数据桥接; 5. 掌握利用ROS2接口发送高层运动指令(速度、方向、姿态)控制机器狗稳定行走。
技术+实验课程(上)
1使用 Gazebo 或 Isaac Sim 构建带地面纹理、障碍物、梅花桩的仿真环境
2OpenCV 图像处理:颜色阈值、边缘检测
3拟合线,计算偏差
4通过 PID 控制机器狗转向
技术+实验课程(下)
1节点(Node)、话题(Topic)、服务(Service)、参数(Parameter)
2DDS 通信机制简介(Fast DDS vs. Cyclone DDS)
3创建功能包(ros2 pkg create)
4编写发布者/订阅者(Python)
5自定义消息类型(.msg)
6ROS2常用命令
2.3 机器狗运动控制与步态算法
学习目标
1. 掌握四足机器人运动控制的核心原理,能够区分并说明常见步态的运动特性; 2. 应用正运动学(FK)与逆运动学(IK)模型,完成单腿及整机脚端位置—关节角度的相互转换,并能将其集成到步态控制流程中; 3. 能够设计并实现脚端轨迹规划(如摆动相与支撑相的轨迹生成),结合步态调度器构建完整的 Trot 步态控制逻辑; 4. 通过 matplotlib 对步态轨迹与机身姿态进行可视化仿真,验证运动控制算法的正确性; 5. 在实机或仿真平台上完成基础姿态控制与参数调优实验,实现机器狗稳定站立与基础移动。
技术+实验课程(上)
1四足机器人运动控制基础导论
2正运动学与逆运动学详解
4脚端轨迹规划
5步态调度器实现框架
3步态类型与相位调度机制
6实现基础Trot步态
技术课程(下)
1matplotlib 仿真步态可视化验证
4机器狗参数调节实验
2机器狗姿态控制
5机器狗实际控制
3matplotlib 仿真姿态可视化验证
2.4 强化学习与智能行为训练
学习目标
1. 理解强化学习的基本框架(状态、动作、奖励、策略)及其在机器人控制中的适用性与挑战; 2. 能够基于 Isaac Gym / Legged Gym 搭建高性能并行 RL 仿真环境,完成机器狗行走任务的建模,包括合理设计状态观测空间、动作输出空间及具有引导性的奖励函数; 3. 理解并实现 PPO算法,通过经典控制任务(如倒立摆、FlappyBird)掌握其训练机制; 4. 完成端到端的 RL 训练流程:从环境构建、策略初始化、训练迭代到策略评估,能够在仿真中成功训练出具备基本稳定行走能力的机器狗策略。
技术课程(上)
1强化学习基础与机器人控制场景
3基于PPO算法的倒立摆
2主流RL算法简介与PPO详解
4基于PPO算法的FlappyBird小游戏
技术+实验课程(下)
1Isaac Gym 与Legged Gym介绍
4使用PPO训练行走策略
2机器狗RL任务建模
5Sim2Sim仿真实验
3构建机器狗行走RL环境
2.5 综合项目与前沿应用
学习目标
1.掌握多机器狗协同控制的基本通信架构,能实现简单队形编排与同步动作表演; 2. 实践集成大语言模型(LLM)与机器狗控制系统,通过自然语言指令调用工具(如运动、感知、动作)实现智能交互; 3. 自定义动作录制与触发系统; 4. 完成至少两项高级应用开发:基于雷达的动态避障(绕梅花桩)、基于双目的目标跟踪与跟随。
技术+实验课程(上)
1多机通信架构
2编排简单队形变换
3接入 LLM
4语音输入 → LLM 解析 → 工具调用
技术+实验课程(下)
1使用 YOLO实现人/物体跟踪
2录制/回放关节轨迹
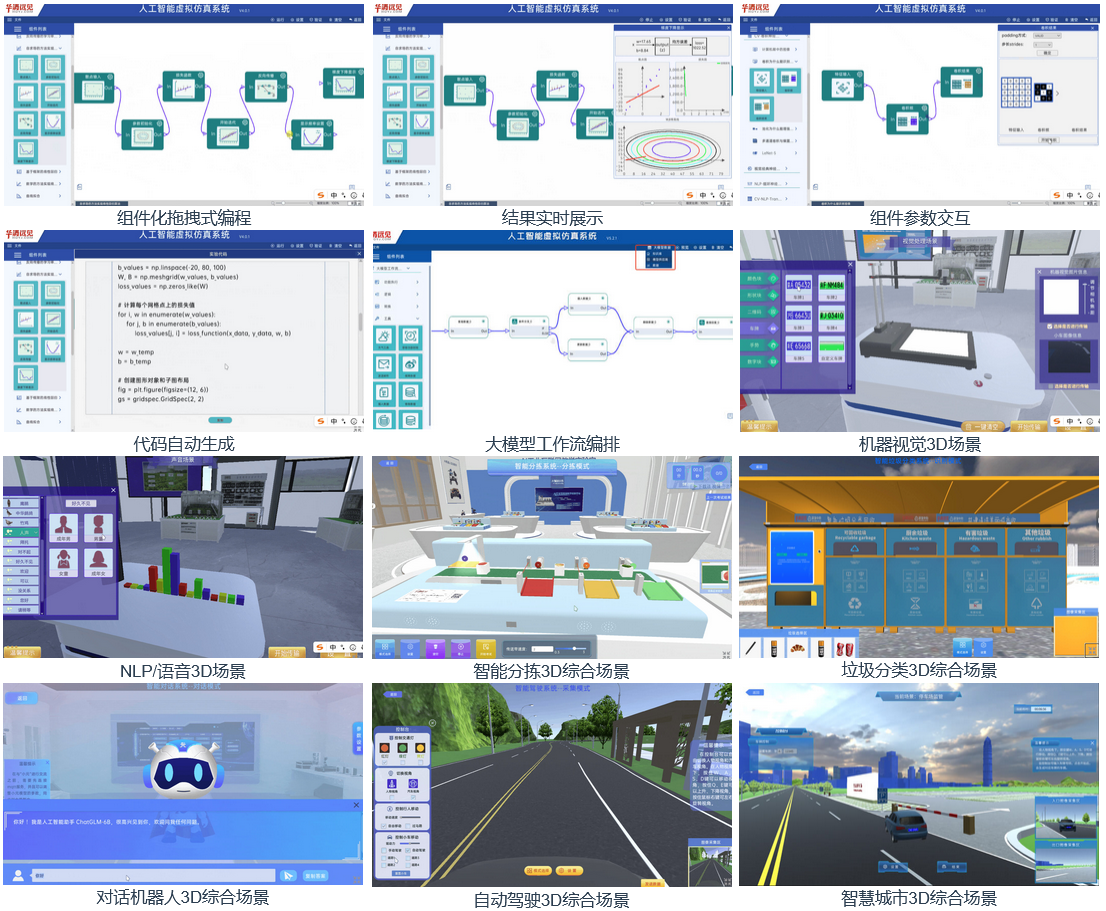
3 人工智能虚拟仿真系统
3.1 人工智能大模型虚拟仿真
3.2 具身智能机器人虚拟仿真
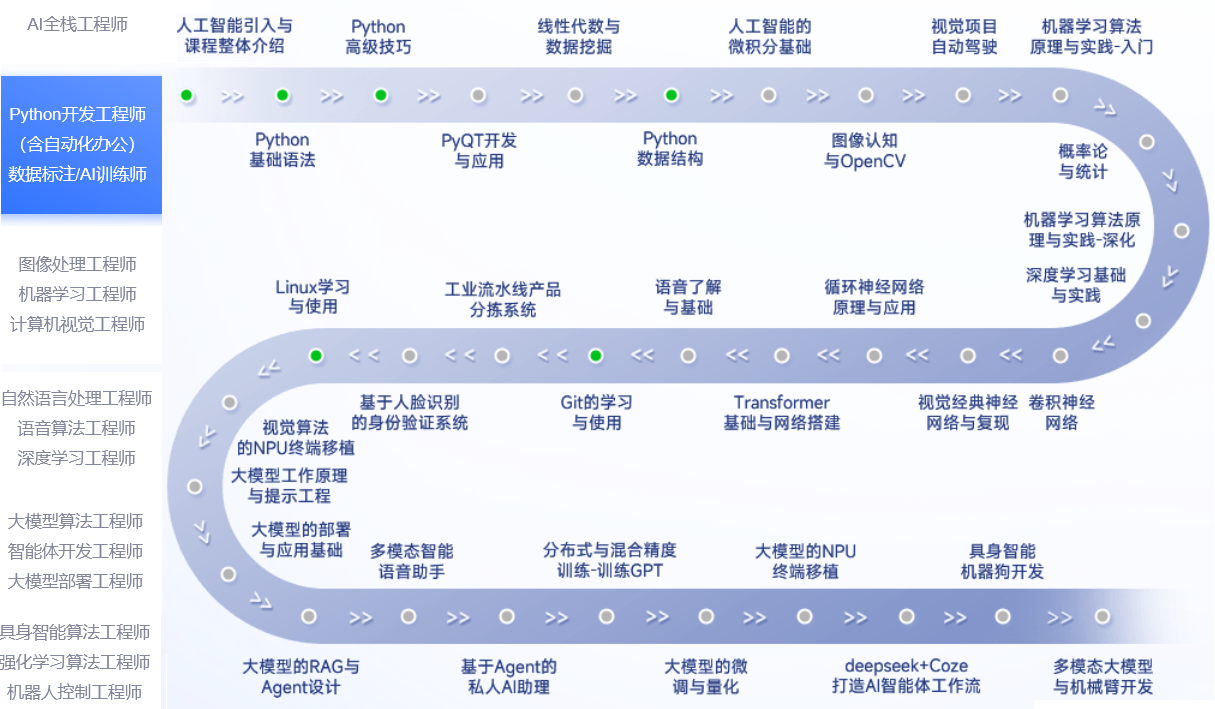
4 技术学习线路图
从入门到精通:AI岗位学习全攻略
5 3D仿真交互式综合项目
沉浸虚拟仿真实验环境,互动学习深化知识理解与技能提升,激发学习热情与创新思维
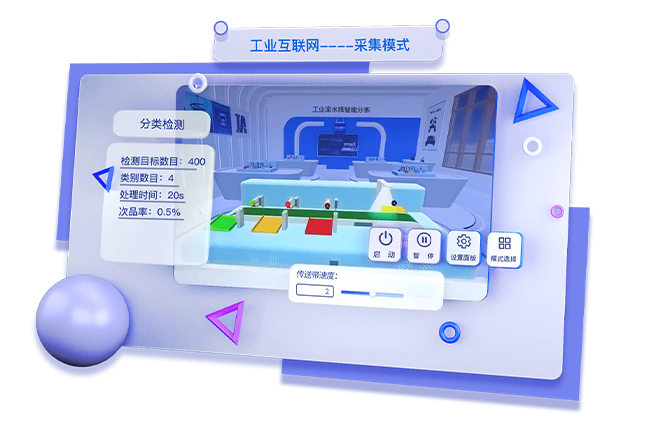
5.1 工业流水线智能分拣
预设工业流水线场景,将待分拣物品输送到分拣系统,可以自行设计规则和算法,将物品分配到正确的下件系统,训练规则和算法越优,越能够实现高速、准确、自动化的分拣处理。
5.2 自动驾驶
预设自动驾驶的道路场景,感知与识别环境信息与道路信息,完成决策与规划算法部署,通过类PID算法控制车辆姿态进行自主导航与智能交互。

5.3 从零开始手写GPT
深入挖掘从transformer到大模型的历史变迁及技术栈的迁移,带领大家从零开始搭建GPT大模型网络,基于此学习各开源大模型的部署与微调。

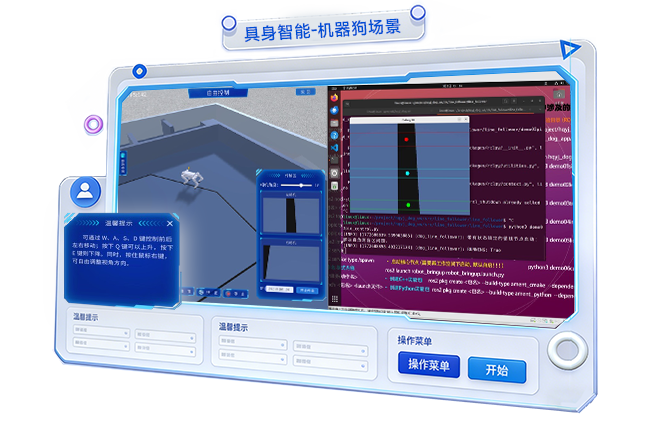
5.4 具身智能机器狗开发
预设具身智能机器狗3D实训环境,可自主设计电机控制逻辑、ROS2 通信方案与步态算法,结合 PPO 强化学习策略优化运动性能。算法与策略设计越完善,越能实现机器狗稳定行走、动态避障与智能决策的高效执行。
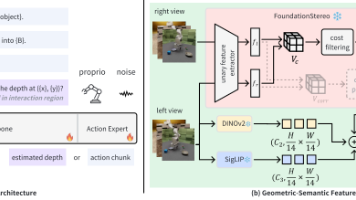
5.5 多模态大模型与机械臂开发
预设具身智能机械臂3D实训环境,可自主完成环境配置、多模态模型调用与语音交互实现,结合机械臂运动学、强化学习及任务规划算法。交互逻辑与控制策略设计越完善,越能实现机械臂精准抓取、智能分拣与复杂任务的高效执行

6 智能交通虚拟仿真系统FS_AIJTSIM
智能交通虚拟仿真聚焦高校专业教学需求,构建 “理论具象化 - 实验场景化 - 实训产业化” 三位一体方案。依托 3D 建模、AI 视觉感知等技术,将智能驾驶、动态车牌识别等真实交通场景转化为交互教学内容,助力高校培养兼具理论与实战能力的智能交通技术人才。

参考
https://www.hqyj.com/zhuanti/shiziban33th.html
https://www.yyzlab.com.cn/topicPages/AIPages
华清远见人工智能虚拟仿真系统--https://test.yyzlab.cn/
智能交通虚拟仿真系统FS_AIJTSIM--https://dev.hqyj.com/products/1474.html

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)