双目相机赋能智能移动:服务机器人与AGV的重要感知解决方案
在智能制造、智慧服务、物流仓储等领域的快速迭代中,服务机器人与自动导引车(AGV)正逐步替代人工完成繁琐、重复、高危的作业任务,成为推动产业自动化升级的重要力量。而这些智能设备能够实现自主移动、精确作业的关键,在于拥有一套高效、可靠的感知系统——双目相机作为模拟人类双眼视觉原理的重要传感器,凭借其原生深度感知、低成本、强环境适应性等优势,已成为服务机器人与AGV实现自主导航、避障、交互、作业的“重要慧眼”,彻底解决了传统单传感器感知精度不足、场景适应性弱的痛点,推动智能移动设备向更精确、更智能、更灵活的方向发展。
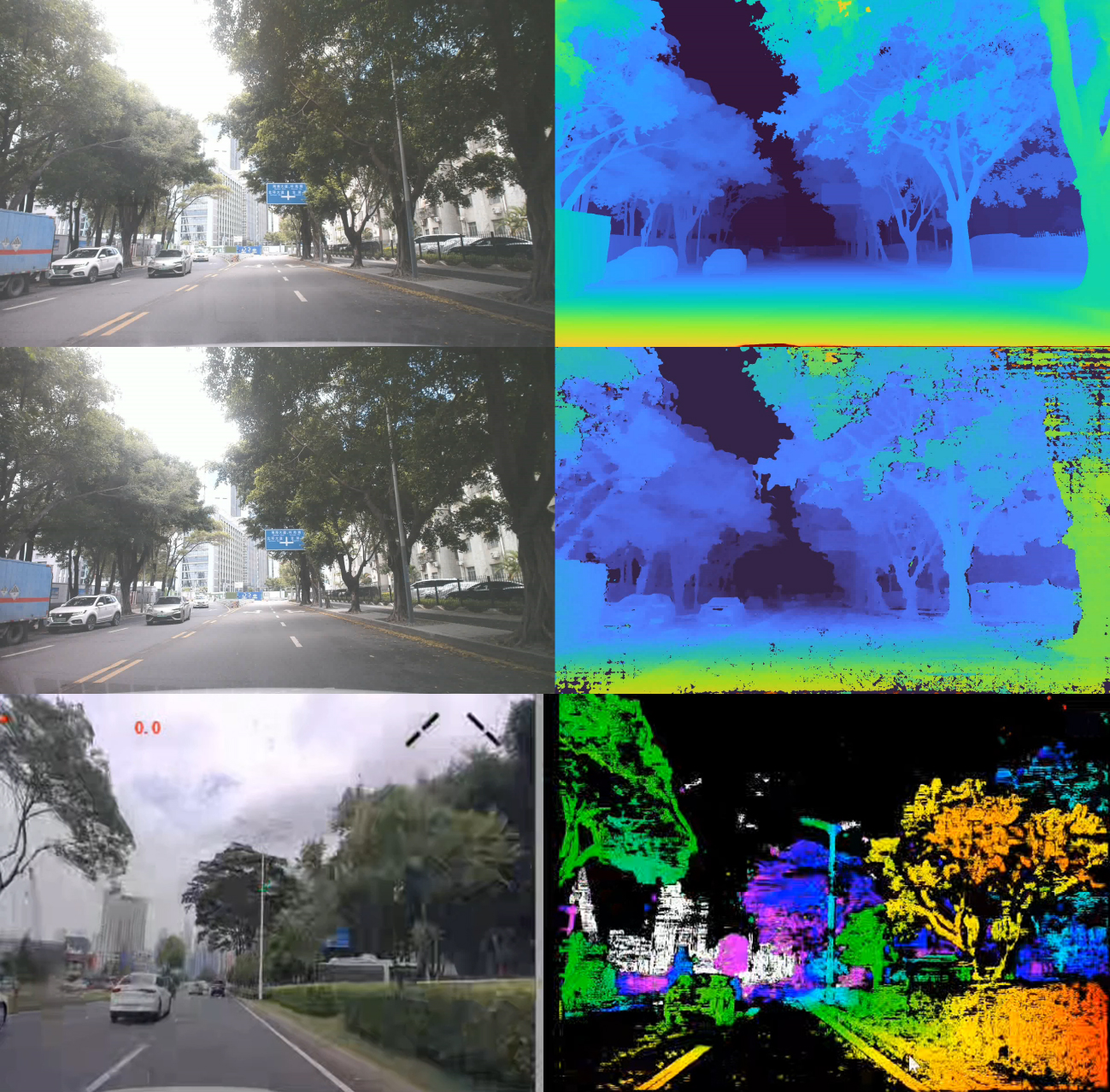
双目相机的重要工作原理基于三角测距与立体匹配技术,由两个具备固定基线距离的镜头同步采集场景图像,通过计算左右图像的像素偏移量(视差),结合相机内参(焦距、主点坐标)与基线参数,将视差转化为真实物理距离,生成深度图与三维点云数据,为智能设备提供精确的空间环境信息。与激光雷达、结构光相机等其他三维感知设备相比,双目相机无需主动投射光源,属于被动视觉方案,不仅功耗更低、结构更紧凑,还能在强光、弱光等复杂光照环境下稳定工作,同时兼顾彩色图像与深度信息采集,一机两用,大幅降低了服务机器人与AGV的硬件成本与系统复杂度,成为目前性价比*高的通用三维视觉感知方案。
双目相机在服务机器人中的应用:让“服务”更智能、更精确
服务机器人的重要需求是“与人共生、高效服务”,涵盖家庭服务、商业服务、医疗服务等多个场景,其工作环境多为动态、复杂的室内空间,对感知系统的灵活性、精确度和交互性要求极高。双目相机作为服务机器人的“视觉中枢”,通过实时采集三维环境信息,实现自主导航、人机交互、物体识别与抓取等重要功能,彻底打破了传统服务机器人“被动执行”的局限,赋予其更强的环境适应能力与智能决策能力。
在自主导航与避障方面,服务机器人需在复杂室内环境中灵活穿梭,避开行人、桌椅、台阶等动态与静态障碍物,同时精确抵达目标位置。双目相机通过实时生成深度图,能够快速识别障碍物的位置、大小与距离,结合SLAM(同时定位与地图构建)技术构建三维环境点云地图,实现无GPS环境下的自主定位与路径规划。
在人机交互与场景适配方面,双目相机让服务机器人能够“读懂”人类行为与环境需求,实现更具人性化的服务。通过采集人脸三维深度信息,服务机器人可实现高精度人脸识别,有效防范照片、视频等伪造攻击,适用于酒店入住、小区门禁等场景的身份核验;同时,双目相机能够捕捉人体关键点三维坐标,实现手势控制、人体跟随等交互功能,用户无需接触设备,通过简单手势即可指令机器人完成开关灯光、播放音乐、移动跟随等操作,大幅提升了人机交互的便捷性。在商业场景中,搭载双目相机的导购机器人可通过识别顾客的行走轨迹、停留时间,分析顾客兴趣偏好,推送个性化商品推荐;在家庭场景中,扫地机器人可通过双目相机识别地面污渍、家具底部等清洁死角,实现精确清洁,同时避开地毯、拖鞋等易缠绕物品,提升清洁效率。
在物体识别与抓取方面,双目相机为服务机器人的作业能力提供了精确支撑。通过三维点云数据,机器人能够精确获取物体的位置、姿态与尺寸信息,引导机械臂完成精确抓取、搬运等作业。
双目相机在AGV中的应用:让“搬运”更高效、更可靠
AGV(自动导引车)作为智能制造与物流仓储领域的重要搬运设备,主要用于物料搬运、货架对接、产线衔接等作业,其工作环境多为工业车间、仓库等复杂场景,对定位精度、避障能力与作业效率要求极高。双目相机凭借其高精度深度感知、强抗干扰能力与低成本优势,逐步替代传统单一传感器,成为AGV实现自主导航、精确对接、智能避障的重要感知组件,推动AGV从“固定路径”向“柔性路径”升级,适配柔性生产与智能仓储的发展需求。
在自主导航与定位方面,AGV需在复杂工业环境中实现精确定位,避开货架、物料、设备等障碍物,同时精确停靠到指定位置(如产线工位、货架接口)。双目相机结合SLAM技术,能够快速构建环境三维地图,实时更新AGV自身位置信息,实现无反光板、无轨道的柔性导航,无需对现有车间、仓库进行大规模改造,大幅降低了AGV的部署成本与难度。与UWB定位技术相比,双目相机无需部署基站,避免了信号遮挡导致的定位失效问题,在堆满物料的仓库、复杂的生产车间等场景中,依然能够保持稳定的定位精度;与激光雷达相比,双目相机成本更低,且能够输出稠密的深度图与彩色图像,兼顾环境感知与目标识别,提升了AGV的导航可靠性。
在精确对接与尺寸测量方面,双目相机为AGV的精细化作业提供了重要支撑。在物流仓储场景中,AGV需要精确对接货架、托盘,完成物料的装卸与搬运,双目相机通过实时采集货架与托盘的三维信息,精确计算对接位置与角度,引导AGV实现毫米级精确停靠,避免了物料碰撞、掉落等问题;在冷链物流场景中,双目相机可通过双目视觉测距技术,精确测量倾斜货物的长、宽、高,测量精度可达±5mm,覆盖500mm~2000mm范围,为AGV的抓取策略提供数据支撑,实现“歪放正取”,提升冷链物流的作业效率与准确性。在工业生产场景中,AGV可通过双目相机识别产线物料的位置与姿态,精确对接产线工位,实现物料的自动上下料,减少人工干预,提升生产效率。
在智能避障与多机协同方面,双目相机能够帮助AGV应对复杂工业环境中的各类障碍物,实现安全、高效的作业。双目相机可实时识别动态障碍物(如车间工人、移动设备)与静态障碍物(如货架、物料堆),计算障碍物与AGV的距离、速度,及时调整行驶路径,避免碰撞;同时,双目相机支持多机同步感知,能够实时获取其他AGV的位置信息,通过合理的调度算法,实现多AGV协同作业,避免相互干扰,提升整个物流系统与生产系统的运行效率。
此外,双目相机在AGV中的应用还具备极强的环境适应性。在弱光、强光、粉尘等复杂工业环境中,双目相机通过搭载高动态范围传感器、抗眩光镀膜、窄带滤光片等组件,能够保持稳定的成像效果,避免了传统传感器在复杂环境中感知失效的问题;同时,工业级双目相机具备抗振动、宽温工作、高精度标定等特点,能够适应工业车间的高温、振动等恶劣环境,支持硬触发、多机同步,可直接对接PLC、工控机,融入自动化产线,实现与整个生产系统的协同联动。
技术升级与应用展望:双目相机开启智能移动新篇章
随着深度学习、立体匹配算法的不断升级,以及传感器技术的持续进步,双目相机在服务机器人与AGV中的应用正不断深化。一方面,双目相机的深度精度持续提升,通过融合深度学习算法,能够有效解决弱纹理、重复纹理、透明物体等场景下的匹配难题,减少深度空洞与误差,提升感知精度;另一方面,双目相机的小型化、低功耗、集成化趋势明显,片上深度计算(SoC)技术的普及,让双目相机能够直接完成深度解算,降低主机负载,更适合小型服务机器人与AGV的部署需求。
未来,双目相机将与激光雷达、毫米波雷达、IMU等传感器深度融合,通过卡尔曼滤波等算法实现误差补偿,进一步提升服务机器人与AGV的感知可靠性与定位精度,适配更复杂的作业场景。在服务机器人领域,双目相机将助力机器人实现更精确的人机交互、更灵活的场景适配,逐步渗透到医疗、养老、教育等更多细分领域;在AGV领域,双目相机将推动AGV向柔性化、智能化、协同化方向发展,适配智能制造、智能仓储的规模化、精细化需求,实现产线与仓储的全流程自动化升级。
作为智能移动设备的“重要慧眼”,双目相机凭借其独特的技术优势,正打破服务机器人与AGV的感知瓶颈,推动智能移动设备从“能移动”向“会思考、能精确作业”升级。随着技术的不断迭代与应用场景的持续拓展,双目相机将在智能制造、智慧服务、物流仓储等领域发挥更重要的作用,为产业自动化升级注入新的动力,开启智能移动的全新篇章。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)