14-8 姿势控制:移动(AGI基础理论)
《智能的理论》全书转至目录不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。移动表示动物从一个地方独立地和安全地运动到另外一个地方,移动包括步态控制、爬、跑、上\下坡、上\下楼梯,还包括从床上移动,从椅子起来,搬运等内容。其中,步态控制是本文主要的论述内容。移动包括三个要求。第一个要求是行进,通过对上下肢和躯体的控制,确保身体朝着期望的位置或方向移动。第
《智能的理论》全书转至目录
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
第8节 姿势控制:移动(Shumway-Cook 和Woollacott(著),刘浩等人(译),2021)
一.移动
移动表示动物从一个地方独立地和安全地运动到另外一个地方,移动包括步态控制、爬、跑、上\下坡、上\下楼梯,还包括从床上移动,从椅子起来,搬运等内容。其中,步态控制是本文主要的论述内容。
移动包括三个要求。第一个要求是行进,通过对上下肢和躯体的控制,确保身体朝着期望的位置或方向移动。第二个要求是姿势控制,确保在移动过程中的方向性和稳定性。方向性需要身体各个节段和环境进行校准,以达到移动的要求。稳定性包含3个方面,(a)稳定性平衡,即在匀速运动下保持的稳定;(b)反应性平衡,即在移动过程中受到意外干扰而恢复的平衡,比如在移动过程中突然被障碍物绊了一下或者踩到湿滑的地板;(c)预期性平衡,即通过提前激活某种肌肉模式以应对在移动过程中预期的不稳定的因素,比如在进入更滑的路面时下盘提前变稳。第三个要求是适应,表示通过调整以应对来自环境和任务的变化。在生活中一直稳定的移动是很少的(如一直在平整的路面行走),随时可能会遇到各种地形改变,包括上下坡、开启、停止、变速、转向以及绕开或者跨过障碍物等,因此适应是必不可少的要求。
二.步态控制的描述
1.时相(Moore,Daley和Agur,2014)
步态主要分为支撑相和摆动相,要注意这两个时相主要是针对单腿而言的。支撑相指的是在行走过程中脚支撑身体的过程(从足跟接触地面开始,直到该腿的脚尖离地),这个时相产生相对于支撑面的水平力使身体前进,并且还要产生垂直力支撑身体以抵抗重力;而摆动相是腿摆动的过程(从足离开地面开始,到足跟接触地面),其目的在于重新放置肢体以继续前进。
在单侧腿的一个周期中,60%的时间为支撑相。支撑相开始的10%和结束的10%为双足支撑期(两只腿同时接触地面),而中间的40%为另外一只腿的摆动相。
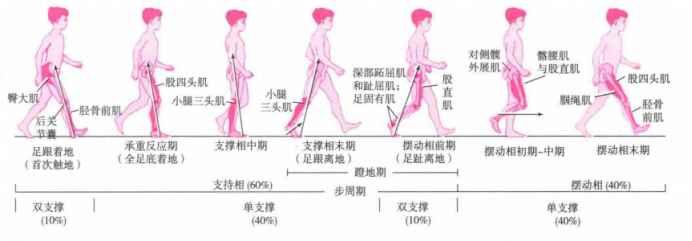
图1
2.阶段(Basmajian和De Luca,1985;Pery和Burnfeld,2010)
一般而言,站立肢体的肌肉起到支撑身体(姿势控制)并推动其向前(行进)的作用。摆动肢体的肌肉活动大部分限制在摆动相的初期和末期。在步行周期的不同时相激活的肌肉如图1所示。
在支撑相,为了确保足跟着地时的姿势稳定性,胫骨前肌离心激活(离心收缩时,肌肉发力期间会有长度增加的表现)使足减速移动,对抗或减慢由足拍击地面引起的跖屈(足尖或足趾向足底方向活动)。同时激活髋伸肌以减少头、手臂和躯干的向前运动,否则这些部分会因足拍击地面而失去向前的动力;在负重反应时,股四头肌激活可控制膝关节微屈以吸收足拍击地面形成的冲击力。此外,髋、膝、踝的伸肌群激活使身体抵抗重力免于坍塌;在支撑相中期,只有小腿三头肌反应活跃,股四头肌和胫骨前肌不活跃。支撑相的第二个目标是产生身体向前的推动力以保持身体运动。一些研究者认为,产生的向前推动力主要涉及支撑相末期跖屈肌(腓肠肌和比目鱼肌)的向心收缩(支撑身体和产生向前的动力)(向心收缩,肌肉在发力的同时会出现长度变短的现象),以及摆动相前期髋屈肌起辅助作用,最终使该腿产生蹬地动作。在支撑相后期,髋、膝伸肌群“从后面推动”身体,尽管这些肌肉的贡献似乎不如跖屈肌和髋屈肌重要。然而,伸肌群对蹬地时头、手臂、躯干运动的控制,避免站立肢体坍塌起重要作用。
在摆动相,摆动相完成的主要目标是重新放置肢体以继续前进,这就需要肢体向前加速并确保足趾廓清(足离地,或不接触地面,以更好的使腿部摆动)。启动摆动的大部分能量发生在摆动相前期。摆动相前期被确定为步行周期的关键部分,因为在摆动相前期产生的肌力决定(足尖)蹬地时膝关节屈曲的速度。摆动的准各始于双支撑期,大部分的屈曲加速发生在足趾离地之前,这时产生了足尖蹬地时的屈膝峰速度。在摆动相初期和中期,髂腰肌(髂肌和腰大肌)在股二头肌的协助下加速屈膝。摆动相初期大腿前向加速也与股四头肌向心收缩有关。然而,到摆动相中期,腿摆动过程中股四头肌几乎没有动作,就像由脉冲力驱动的钟摆一样。而髂腰肌收缩有助于这种向前运动。摆动相末期腘绳肌变得活跃,以减慢大腿向前转动,为足跟着地做好准备。摆动相结束时伸膝为支撑相肢体负重做准备,这不是肌肉活动的结果,而是被动引起的。
3.参数
步态可以使用一些参数描述,包含:
(a)步速,即步行速度;
(b)步长,一只腿的脚后跟着地到另外一只腿的脚后跟着地的距离(一步);
(c)步频,单位时间内的步数;
(d)跨步长,一只腿的脚后跟着地到同一只腿脚后跟着地之间的距离(两步)。
这几个参数互相影响,比如,当步速提高时,步长和步频都会增大。另外,步速对步态时相也有影响。当步速提高时,摆动相和支撑相的时间比例发生变化,支撑相相对于摆动相逐渐变短。当支撑相/摆动相之比从行走的60/40分配转变为40/60分配,此时行走转变为奔跑。而在奔跑时,双腿支撑期消失了。当行走速度减慢时,支撑时间增加,且站立的双腿支撑期增加,而摆动时间保持相对稳定。例如当步行周期约为1.1秒时,双腿支撑期占步行周期的25%;而当步行周期增加到大约2.5秒时,双腿支撑期可以占到步行周期的50%。(Hermanetal.,1976)
4.特征
步态的一个重要因素就是节能,即尽可能的减少能量消耗。早期理论认为,不同关节的代偿运动使身体中心的垂直位移最小化,从而优化能量消耗。然而,Farley和Ferris(1998)认为减少行走的代谢消耗并不是通过COM的垂直位移最小化来实现的,而是通过平滑地传递动力和重力能量。即COM以正弦波动的方式实现能量的传递。研究表明,在行走时,身体由相对坚硬的负重腿支撑,从脚后跟着地到支撑相中期,COM上升,此时部分身体动能转为部分势能(其余势能通过肌肉运动获得)。当COM在站立中期达到其最高点时,此时重力势能最高,身体动能最小;从支撑相中期到支撑相末期,COM下降,重力势能转为身体动能。当另一只腿后跟触地时,COM达到其最低点时,此时重力势能最小,身体动能最大(Farley和Feris,1998)。
5.反应性平衡控制
类似于恢复站立平衡那样,反应性平衡控制也存在于从意外工扰到步态恢复期间的迈步周期中。有人进行以下研究,被试走过一个平台,在步行周期的不同点给予干扰,模拟行走时的滑倒(Nashner,1980)。例如,当实验室支撑面人为后移导致身体前倾时,姿势肌反应会在大约100毫秒时激活。这可减慢身体向前行进的速度,从而将COM与向后移位的支撑足重新对齐恢复平衡。同样,当支撑面向前移位使身体相对后移时,胫骨前肌的缩短比平常更慢。这有助于提高步态前进的速度,使身体与向前移位的脚重新对齐。
当行走平衡受到威胁时肌肉的反应模式是按照由远至近的顺序激活。例如,在足跟着地时发生前滑,首先激活同侧胫骨前肌,随之是股直肌和股二头肌,然后是臀中肌和腹肌(Tang,Woollacott和Chong,1998)。另外,类似于对站立的研究,手臂运动常用于恢复步态的平衡。移动过程中滑倒时所激发的手臂向前抬起有助于抵消COM向后倒。手臂运动也有保护作用,无论是手伸向附近的扶手,还是摔倒发生时手臂支撑吸收冲击力。这些通常被称为“全身反应”。
如何在被绊住时恢复平衡?对被绊住干扰的反应的研究分析发现,用于维持稳定的策略类型取决于被绊住是在摆动相的什么时候发生的。如果被绊住是在行走的摆动相早期发生,最常见的运动结果是采取抬高摆动肢体的策略,如图2(a)。如果被绊住发生在摆动相后期,使用抬高策略则是危险的,因为在接近地面时摆动肢体的屈曲会增加不稳定性。因此,被试会使用降低策略,形成一个缩短的步长,如图(b)。(Eng,Winter和Patla,1994)
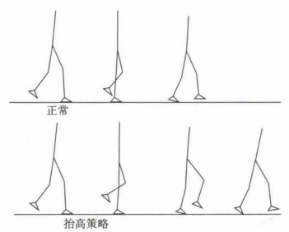
图2(a)
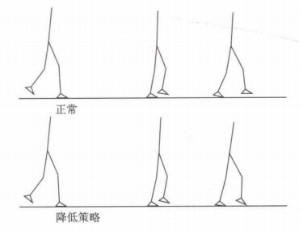
图2(b)
6.预期性平衡控制
步态的预期性平衡控制包括视觉激活的策略,以调节步态来应对环境中的潜在威胁。大多数视觉激活的预期性平衡控制可以在一个步行周期内成功执行。但改变方向例外,它需要提前计划一个步行周期。接下来的部分将讨论关于视觉激活预期性平衡控制的几项研究。
(a)跨越障碍
相对正常行走而言,跨越障碍物行走时需要更多的控制以保持平衡,因为跨越障碍物时可能会发生身体不平衡并导致摔倒。为了确定在跨越不同高度的障碍物时COM的运动,Chou和他的同事(Chou,Kaufman,Brey和Draganich,2001)让年轻成年被试以自己舒适的行走速度行走,并越过高度为自身身高2.5%~15%的障碍物。他们发现,跨越较高的障碍物将导致COM在前后方向和垂直方向运动的范围更大,同时COM和压力中心(COP,压力中心是支撑面受到的全部压力的分布中心)之间的前后距离更大。
之所以决定跨越而不是绕过障碍物,与物体和身体的比例相关。例如当障碍物的尺寸与腿长的比例为1:1时,被试更愿意绕过它(Waren,1988)。这种选择可能与稳定性问题有关,因为被绊住的风险随着跨过物体的高度增加而增加。障碍物的特征也会影响步态该如何改变以避免碰撞障碍物。例如对障碍物易碎性的认识会影响足趾廓清的程度,越易碎的物体足趾廓清越显著(为了避免碰撞物体)(Patla,1997)。
(b)适应地面条件
在不同的地面条件下行走或奔跑时,人类如何调节步态?在Cham和Redfern(2002)的研究中,了解了当被试提前知道可能的危险时(如面对湿滑的地面),该如何调整策略。他们让被试走过干燥的地板(基线条件)或有水的、有肥皂的或有油的地面(四种实验条件)。他们发现,当被试预测到地面是湿滑的时将会减少与地面的摩擦,步行产生的摩擦系数的峰值比基线条件下的要低16%~33%,以减少滑倒的可能性。这是通过减少支撑足的站立持续时间、负重速度、缩短步幅长度以及在足跟着地时使用较慢的角速度来实现的。
(c)适应斜面
行走时通常会遇到有坡度的地面,这是无法避免的。因此,为了使活动能力不受限,有必要调节步态以应对倾斜的地面。研究表明,与在水平地面上行走相比,年轻人在倾斜面或斜坡上行走时会显示更大的关节角运动以及更大的下肢肌肉活动。这些变化在上坡时伴随着步长增加、步频减小,在下坡时步长减小、步频增加。(Kawamura,Tokuhiro和Takechi,1991;Lay et al., 2006)。
(d)转向策略
为了确定健康年轻人在转弯时使用的策略,Hase和Stein(1999)要求被试以舒适的速度行走,并在感受到电刺激时转向特定的方向。结果显示他们使用了两种不同的转向策略,具体使用哪种这取决于在转弯之前他们的哪只脚在前面。例如,右脚在前向右转时,通常将身体绕右脚旋转,称为“扭转转向”。右脚在前向左转时,他们将重量转移到右腿,然后左髋外旋迈出左腿,继续转动,直到右腿向新的方向迈出,称为“迈步转向”。
7.迈步起始(Rajib和Chha,2015)
在日常生活中,迈步是以直立姿势为起点。在迈步起始这个过程中,利用站立平面的摩擦力将COM向侧方移动到支撑腿,然后向前移动到脚掌边缘,从而迈出第一步。为保证COM 的移动方向,腿部肌肉会按照一定的次序产生激活和抑制,并会使COP先向与 COM 相反的方向移动,再向相同的方向移动。有学者将COP的移动轨迹分为前后和左右两个方向分别来分析,结果发现,在前后方向上,COP的移动先向后再向前;在左右方向上,COP先移向摆动腿,再移向支撑腿。COP的移动轨迹如图3所示。
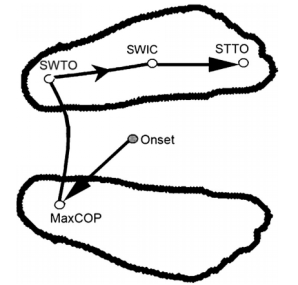
图3
三.步态控制的机制
1.神经系统
在研究移动控制时最常用的3种解剖病理标本是脊髓(切断大脑的下行通道,步态仅受到脊髓影响)、去大脑(去大脑,仅保留脊髓、脑干和小脑参与对步态的控制)和去皮质(去除大脑皮质,仅保留基底核、脑干和脊髓参与对步态的控制)。在这种标本下产生移动行为需要靠外部刺激,刺激可以是电的或药物的。通过这些层次,可研究不同脑区对步行的影响。
(1)脊髓
研究发现,脊髓化(仅保留脊髓)和传入阻滞的猫在跑步机上行走时的肌肉活动与正常的猫类似(Grillner和Zamgger,1979),在这个过程中,中枢模式发生器发挥重要作用(14-6:运动控制的神经系统)。另外,在摆动相用玻璃棒触碰猫爪的顶部,它会激活受刺激腿的屈曲反应,同时对侧腿会伸展。也即抬高摆动腿使之越过障碍物,且对侧腿能提供姿势支撑(Forssberg,Grillner和Rossignol,1977)。在人类中,中枢模式发生器最有说服力的证据来自新生儿,因为婴儿来自大脑的下行通路还没有发育。例如虽然新生儿没有成熟的锥体束,但可以观察到他们有踏步动作。此外新生儿在行走时对干扰有反应(Pang和Yang,2000;2001;2002)。
(2)脑干和小脑
当通过兴奋性刺激激活脊髓的中枢模式发生器时,由于缺乏来自脑干和小脑的调控影响,它们充其量产生歪曲的行走。在调控步行周期上,小脑具有调节活动和纠正错误的作用。已有研究表明,步态的自动控制方面受小脑中间区域的调节,该区域接收来自身体感觉、视觉和前庭觉的输入,并将输出发送至脑干的网状结构。小脑中间区域主要通过肢体的身体感觉输入来调节步态,而外侧小脑则可以在新的环境下以及以视觉引导为主时调节步态(Takakusaki,Tomita和Yano,2008)。小脑也可能改变迈步模式(时间安排与节律控制,14-6:运动控制的神经系统)。例如当动物穿过不平坦的地面时,根据遇到障碍物的视觉线索,腿部必须抬高或降低。这时,移动节律会传达到小脑,然后小脑及时推算以指定下次屈曲(或伸展)何时发生。脑干的作用在于负重和推进。
(3)基底核
当基底核完整保留时,移动行为不需要依赖外部刺激来产生,能启动正常的目标导向行为。
(4)大脑皮质
大脑的不同皮质对步态控制有不同作用。例如,视觉处理包含“什么”和“哪里”两条通路。这些通路帮助我们从不同的视角识别物体和事件,并从以自我为中心的角度处理这些信息,以便于我们可以在空间中有效地移动(11-4:定位与导航)。海马是编码拓扑信息的部位,而顶叶皮质(接收视觉和身体感觉信息)提供三维空间的度量表现。额叶皮质与基底核会在以自我为中心的框架中将这些信息转化为适当的空间定向移动(Paillard,1987;Patla,1997)。
2.感觉系统
在动物中,当所有感官信息都被剥夺时,步态模式往往是非常缓慢和刻板的。动物既不能保持平衡,也不能调整步态模式,使步态真正具有功能性。调节步态的感觉包括身体感觉、视觉和前庭觉。
(1)身体感觉(15-4:身体感觉:本体感觉)
身体感觉有助于步态的实现。比如在支撑相时,牵张反射有助于腿的伸张保持站立;在支撑相结束时,屈肌的肌梭会受到拉伸,刺激屈肌收缩并抑制伸肌,进入摆动相。另外,跑步中牵张反射增益减少,这可能是因为高增益反射性反应会使跑步中的步态不稳定(Stein,1991)。高尔基键器有助于适应步行中地形的改变,比如上楼梯时,当高尔基键器的反馈会随着伸肌的负荷增加而增加,从而增强伸肌运动神经元的激活程度。而在休息时作用正好相反,高尔基键器没受到拉伸而抑制自身肌肉并兴奋拮抗肌。触觉可以使肢体在遇到障碍物时采用适合的动作,比如在摆动相的过程中,使用玻璃棒触碰猫的前爪,会刺激猫的屈曲反射,抬高腿迈过障碍物,而对侧伸肌保持伸直提供支撑。最后,来自肢体的感觉有助于适当的迈步频率。
(2)视觉
视觉有多种途径以反馈的方式调节移动。首先,视觉光流线索可以帮助我们确定移动的速度(Lackner和DeZio,1988)。研究表明,一个人在行走时,如果将经过他的光学流量加倍,100%的人会增加步长。此外,大约一半的人会意识到每一步所用的力量小于正常,然而,其他被试会感知到他们的迈步频率几乎翻了1倍(Lackner和DeZio,1992)。视觉流线索也影响行走时身体相对于重力和环境的对线。例如一个人正在活动平板上跑步,当研究人员只倾斜活动平板周围的房间环境时,这会造成跑步者躯干向房间倾斜的方向倾斜(Lee和Young,1986)。
步态的地面视觉处理时间是与其他任务共享的(如一边注意路面情况,一边注意环境中的目标),因此当我们在平坦的路面上行走时,地形的采样时间(注意路面情况)通常不到我们行走时间的10%。然而,当通过要求被试行走不平坦的地面时,视觉路面监控可达大约30%,并通过地形采样进行步态的预期性平衡控制(Patla,1997;Patla,Adkin,Martin和Holden等人,1996)。
(3)前庭觉
控制移动的一个重要部分是稳定头部,因为它包含控制运动的两个最重要的感受器:前庭和视觉系统。耳石器官、球囊和椭圆囊检测头部相对于重力的角度,视觉系统也为我们提供视觉垂直感。成人似乎通过调整头部以达到头部在矢状面上的稳定性,并因此能凝视(Pozzo,Berthoz和Lefort,1990;Pozzo,Levik和Berthoz,1992)。头部的稳定是很精确的(在几度内),并与前庭眼反射相互协调,这是头部运动时稳定凝视的重要机制。
3.认知系统
步态是需要注意力资源的,且所需的注意资源量根据认知的困难以及姿势或移动任务而变化。
(1)稳态步态(在平整路面行走时)
Lajoie等人(Lajoie,Teasdale,Bard和Fleury,1993)对不同姿势(包括步态)对注意力的要求进行了研究。实验要求年轻人在坐位、站立、行走时(单支撑期与双支撑期)完成一项听觉反应任务。坐位下的反应时间最快,站立和行走任务的速度慢。在步行任务中,单支撑期的反应时间比双支撑期慢。这说明,姿势越难所需注意越多。
Ebersbach等人(Ebersbach,Dimitrijevic和Poew,1995)研究同时进行的任务对步态控制的影响。他们测量单一任务(行走时没有同时进行其他任务)条件下的步态参数(步幅时间、双腿支撑时间)和双重任务条件下的步态参数。其中,双重任务条件的一个任务是行走,另外一个为随机顺序呈现的4个任务,包括:(a)记忆任务(数字回忆广度任务);(b)精细运动任务(行走时不断解开和扣上外套上的纽扣);(c)组合任务(数字回忆和系纽扣任务);(d)手指以5Hz或更快的频率敲击。与单任务相比,唯一能够显著减少步幅时间(增加步频)的双重任务条件是手指敲击。当精细运动和记忆任务与行走同步进行时,被测量的“双支撑时间”显著地受到影响;其他双重任务条件不影响该参数。有趣的是,作者指出执行步态任务确实影响数字回忆任务。在安静站立时,平均数字回忆广度为6.7(6~8),但在行走时减少到5.8(4~8)。在这项研究中,步态参数的变化是相当小的,这表明简单的认知任务并不会对步态的稳定性产生较大影响。
(2)跨越障碍
Chen和他的同事(Chen,Schultz,Ashton-Miller和Giordani等人,1996)研究分散注意力对跨越障碍的影响。在这项研究中,要求被试在人行道末端的红灯亮起时走过人行道并跨过一个虚拟物体(一条光带)。在一些试验中,他们被要求在跨越障碍的同时执行一项其他任务,包括发出声音的反应。作者测量单一任务和双重任务条件下接触障碍物的情况。结果表明,当注意力被分散时,接触障碍物的情况会增多。另外,Brown等人(2005)发现,年轻人在跨越前期比在跨越障碍期更加注意步态。
跨越障碍物是需要注意力的资源的,但它在何种程度上影响姿势与认知任务的执行?Siu等人(Siu,Catena,Chou和van Donkelaar等人,2008)比较年轻人在跨越障碍物时与稳态行走或坐位时(三种实验条件),能够对听觉Stroop任务(单词的高与低,音调的高与低)(9-16:视觉特征整合)做出准确反应的程度。他们发现随着姿势任务难度的增加,年轻人在听觉Stroop任务中的反应时间受到影响,但步态没有差异。这证实了先前的研究结果,姿势任务需要注意力,且为了保证姿势会减少对其他任务的执行。
然而,行走时完成更复杂的认知任务,如使用手机,确实会产生受伤的风险(Nasar和Troyer,2013)。即与上述研究相反,在这种条件下注意分配并不以姿势控制为主,使用手机在这种条件下获得优先级。因此,姿势和步态控制的优先次序是任务依赖的且可调节的。
四.爬楼梯
与步行相似,爬楼梯分为2个时相,支撑相持续全周期的约64%,摆动相持续全周期的36%。此外,走楼梯的每个时相都可被进一步细分,以反映每个时相需要达到的目标。
1.上楼梯
上楼梯时,支撑相被细分为承重期、身体上提期和向前持续推进期,而摆动相被细分为足廓清期和足放置期。
在支撑相,承重期始于足的中部到前部。膝和踝的伸肌活动产生身体上提,主要是股外侧肌和比目鱼肌的向心收缩。最后,在站立相向前持续推进期,踝关节产生向前和抬升的力量。对于上楼梯时的平衡控制,最大的不稳定性来自对侧足趾离地,此时同侧腿承受全身体重而髋、膝和踝关节均屈曲(McFadyen和Winter,1988)。
爬楼梯的摆动相类似于水平步态,包括足廓清和适当地摆放足,以便于下一个站立相可以承重。足廓清是通过激活胫骨前肌背伸足和激活腘绳肌屈膝来实现的。通过激活摆动腿的髋屈肌以及对侧站立腿的运动使摆动腿向上和向前活动。最后足的摆放由髋伸肌和踝背伸肌控制(McFadyen和Winter,1988)。
2.下楼梯
上楼梯是通过股直肌、股外侧肌、比目鱼肌和腓肠肌内侧头的向心收缩来完成的。相反,下楼梯是通过这些肌肉的离心收缩来实现的,这是为了抵抗重力控制身体。下楼梯的支撑相被分为承重期、向前持续推进期和控制性下降期,而摆动相有两个阶段,腿部拉动期和足准备放置期(McFadyen和Winter,1988)。
承重期的特点是通过小腿三头肌、腹直肌、股外侧肌的离心收缩来吸收踝关节和膝关节的能量。这一时期的能量吸收是至关重要的,因为当摆动肢体初次接触楼梯时,记录到的地面反应力是体重的2倍。激活腓肠肌先于接触楼梯起到缓冲着陆的作用(Craik,Cozzens和Freedman,1982)。
向前持续推进期反映身体的向前运动,并先于控制性下降期。身体的下降主要由股四头肌的离心收缩控制,并且在较小程度上受到比目鱼肌的离心收缩控制。
在摆动相,由于髋屈肌的激活,腿部被拉过去。然而,在摆动相中期,髋关节和膝关节的屈曲被逆转,3个关节都伸展以准备足部放置。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 18
18 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)