BLDC无刷直流电机转速电流双闭环调速系统的Simulink仿真之旅
BLDC无刷直流电机仿真设计simulink 转速电流双闭环 调速系统 matlab simulink仿真 有整理好的文档,资料很详细,可以直接用,有参考资料,
最近在研究BLDC无刷直流电机,这小家伙可真是电机领域的一颗璀璨明珠,凭借着效率高、寿命长、调速性能好等优点,在好多地方都能看到它的身影,像电动汽车、无人机还有工业机器人啥的。今天就跟大家唠唠用Matlab Simulink对它的转速电流双闭环调速系统进行仿真设计。
咱手里有整理好的详细文档和参考资料,这就好比有了寻宝地图,心里踏实多了。
为啥要双闭环调速系统
在深入Simulink仿真前,咱先得明白为啥要用转速电流双闭环调速系统。简单来说,单闭环调速系统能调速,但面对负载变化、电网电压波动时,性能就有点捉襟见肘了。双闭环调速系统呢,就像是给电机配上了两个聪明的小助手,一个管转速(转速环),一个管电流(电流环)。转速环保证电机能按照我们期望的速度稳定运行,电流环则保护电机,避免电流过大把电机烧坏,还能在启动、制动的时候让电机快速响应。
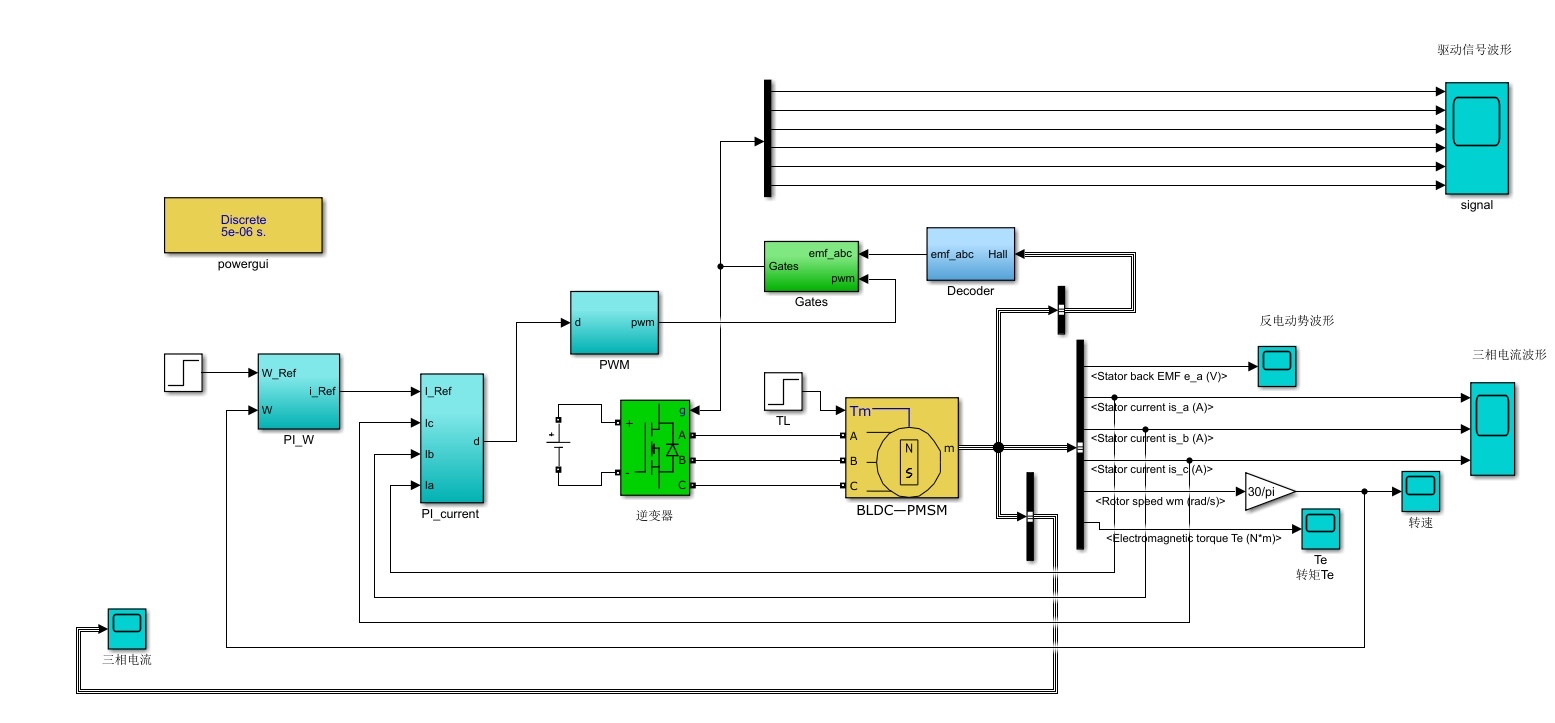
Simulink模型搭建
电机模型部分
首先在Simulink里搭建BLDC电机模型。咱可以从Simscape Electrical库中拖出相关的电机模块,比如“BLDC Motor”模块。这个模块就像是电机的虚拟替身,它需要一些关键参数来定义电机的特性,像定子电阻、电感、磁极对数、转动惯量等等。
% 假设我们定义电机参数
R = 0.5; % 定子电阻
Ld = 0.001; % d轴电感
Lq = 0.001; % q轴电感
p = 4; % 磁极对数
J = 0.001; % 转动惯量这些参数得根据实际电机来确定,它们直接影响着电机仿真的准确性。把这些参数填到“BLDC Motor”模块对应的参数框里,电机模型这一块就算搭好了一半。
双闭环控制部分
接下来是转速电流双闭环控制部分。转速环的输入是我们期望的转速(可以用一个“Step”模块来模拟给定转速),输出是电流的给定值。这里转速环一般用PI调节器来实现,在Simulink里拖出“PI Controller”模块。
% 转速环PI参数
Kp_speed = 10;
Ki_speed = 100;把这两个参数设置到“PI Controller”模块里,它就会根据当前转速和给定转速的差值,通过比例积分运算,输出合适的电流给定值。
BLDC无刷直流电机仿真设计simulink 转速电流双闭环 调速系统 matlab simulink仿真 有整理好的文档,资料很详细,可以直接用,有参考资料,
电流环的输入是转速环输出的电流给定值和实际反馈的电流值,输出则是控制电机的电压。同样电流环也用PI调节器,拖出另一个“PI Controller”模块。
% 电流环PI参数
Kp_current = 1;
Ki_current = 10;设置好电流环的PI参数,电流环也就搭建好了。把各个模块按照双闭环的逻辑连接起来,从给定转速到转速环,再到电流环,最后连接到电机模型,这样整个双闭环调速系统的Simulink模型就基本搭建完成了。
仿真与结果分析
搭建好模型后,就可以设置仿真参数开始仿真啦。设置好仿真时间,比如0 - 5秒,选择合适的求解器(一般默认的ode45就挺好用)。
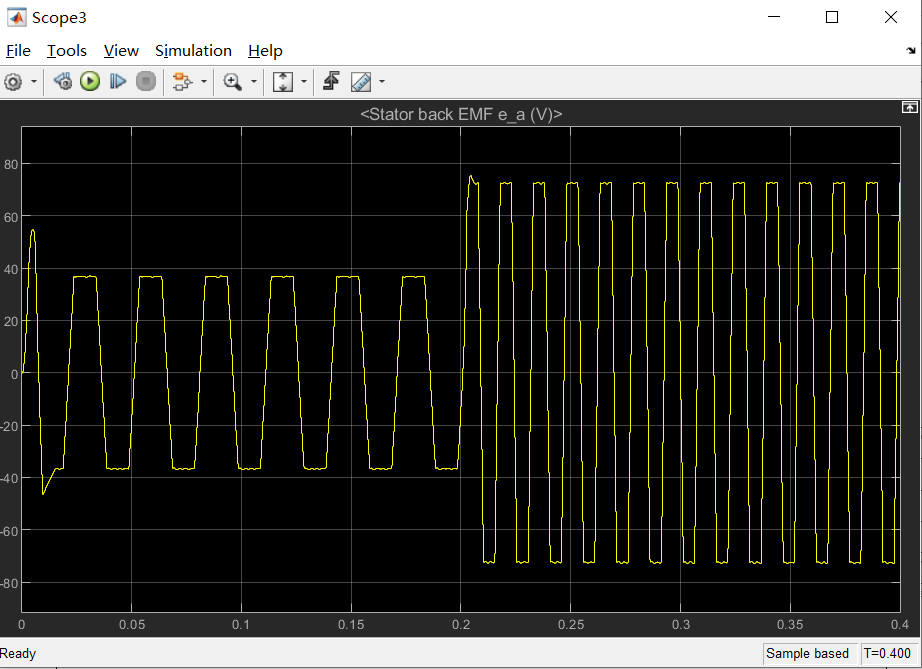
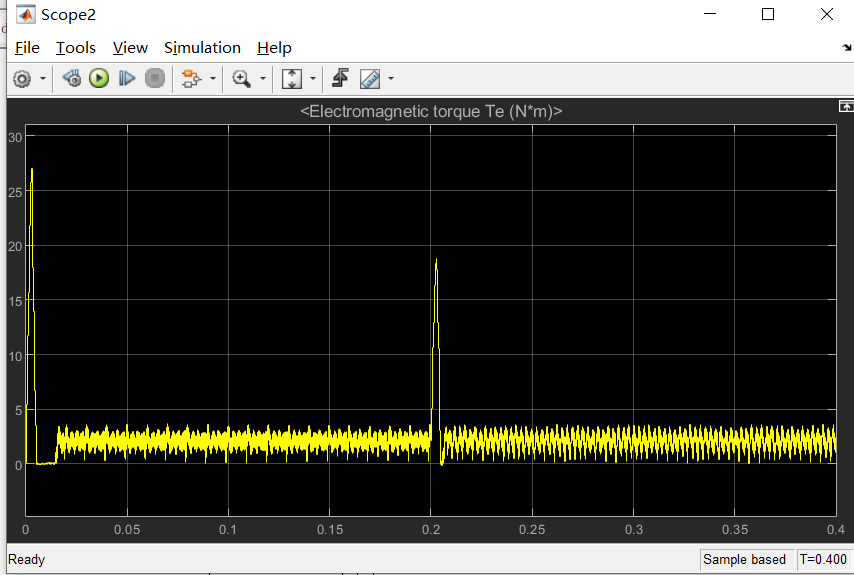
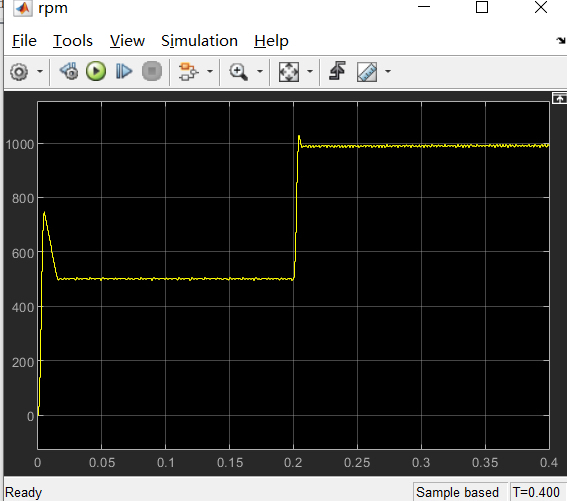
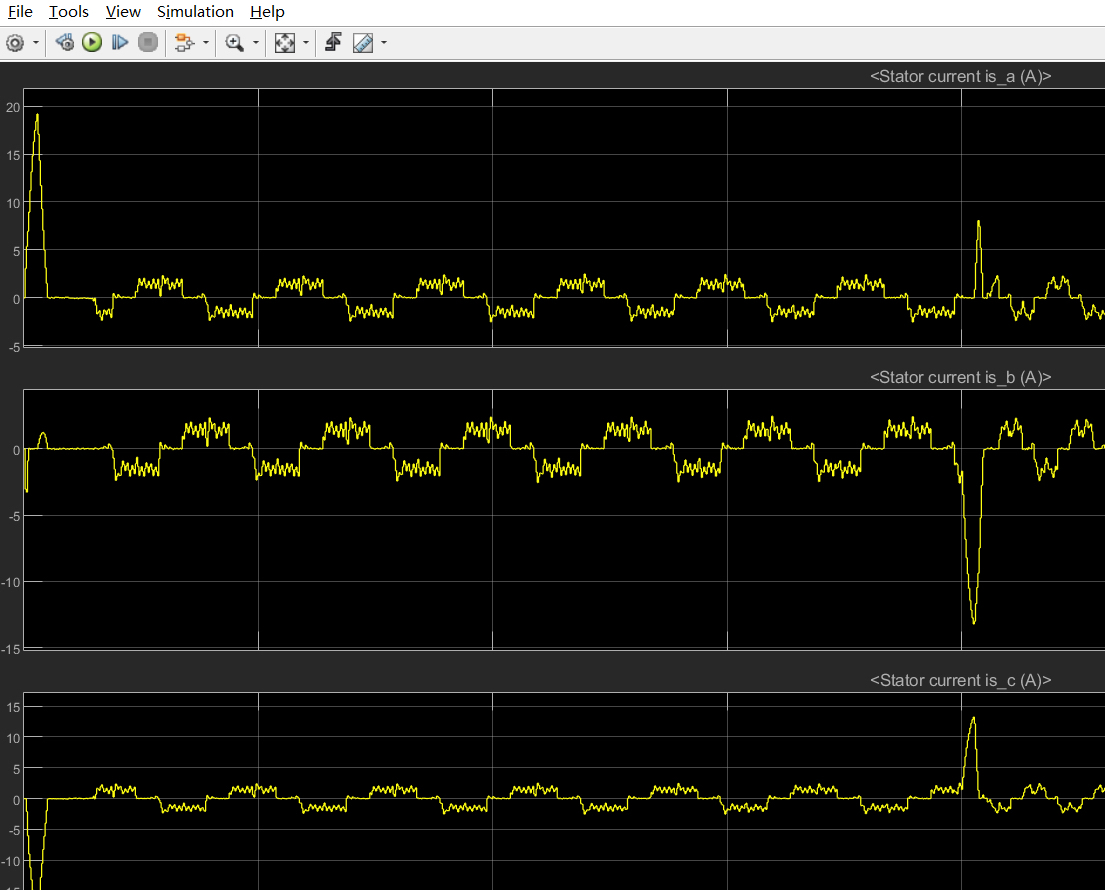
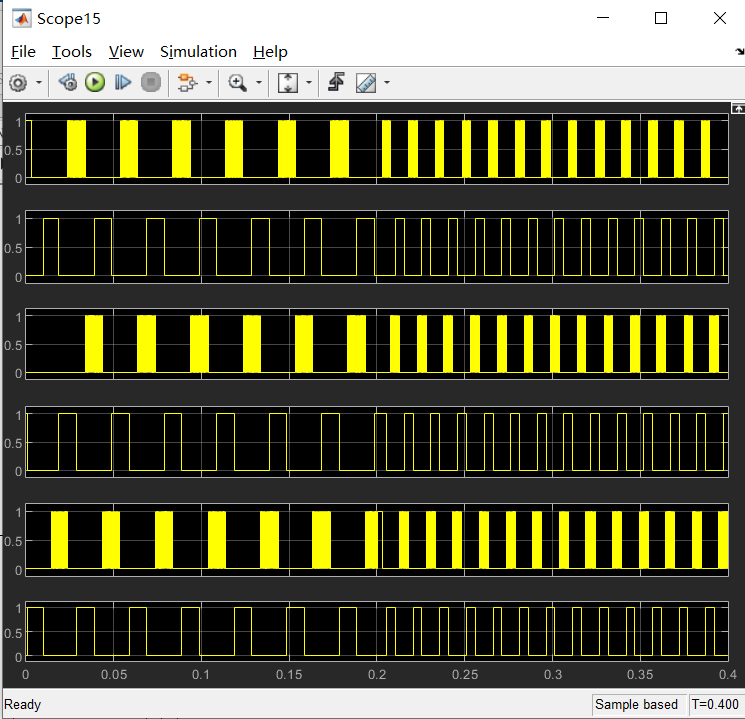
仿真结束后,我们可以观察转速和电流的波形。如果转速能快速稳定到给定值,而且在负载变化时波动较小,说明转速环工作良好。电流波形在启动时会有一个峰值,随后稳定在一个合适的值,这表明电流环有效地限制了启动电流,并且能根据负载变化调整电流。
通过这次基于Matlab Simulink的BLDC无刷直流电机转速电流双闭环调速系统的仿真设计,我们对电机的控制有了更直观的认识,也能通过调整参数不断优化系统性能。手里的详细资料和参考文档帮了大忙,让整个过程顺利不少。希望这篇博文能给同样在研究这一块的小伙伴们一些启发。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)