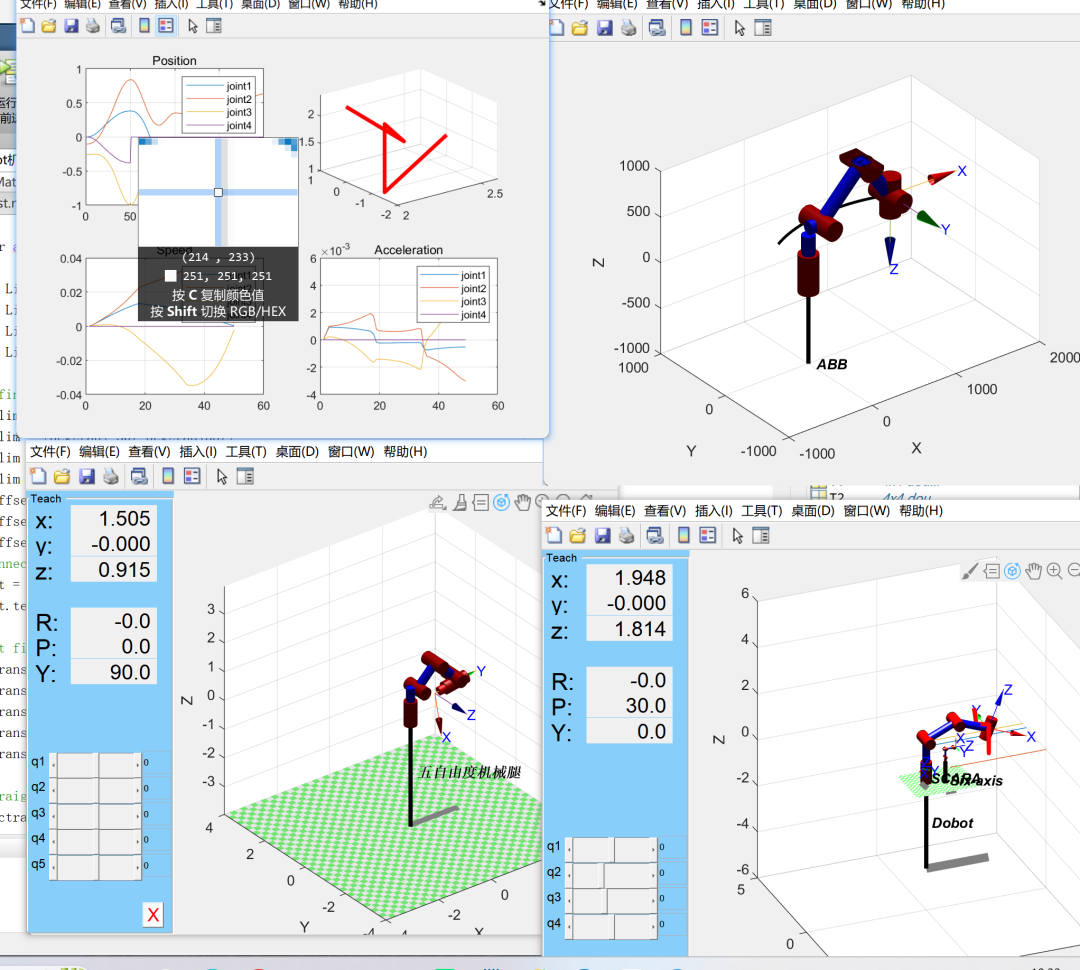
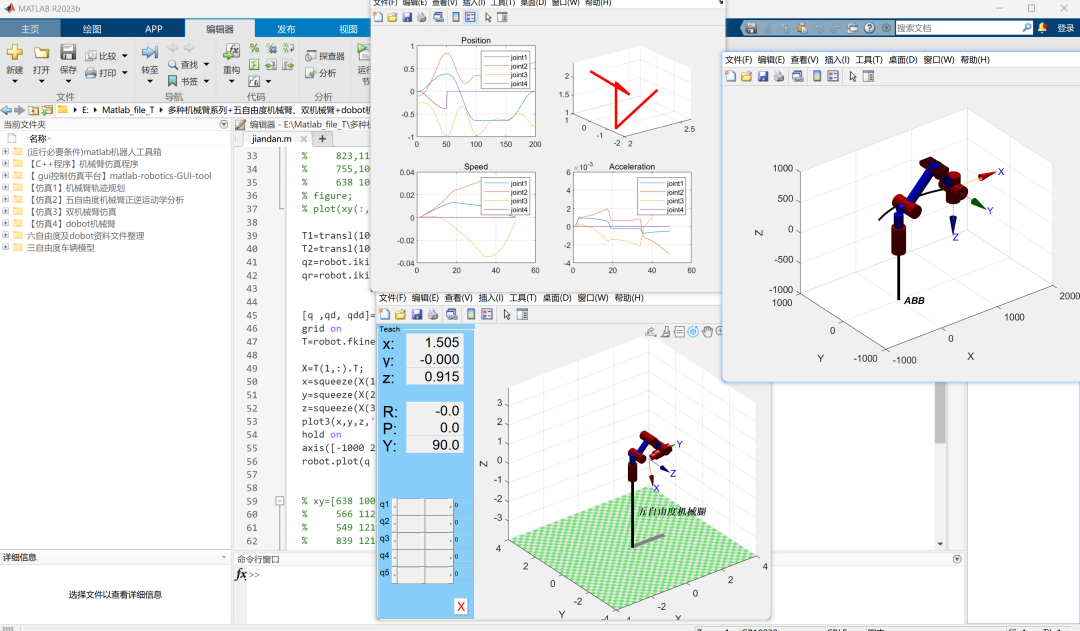
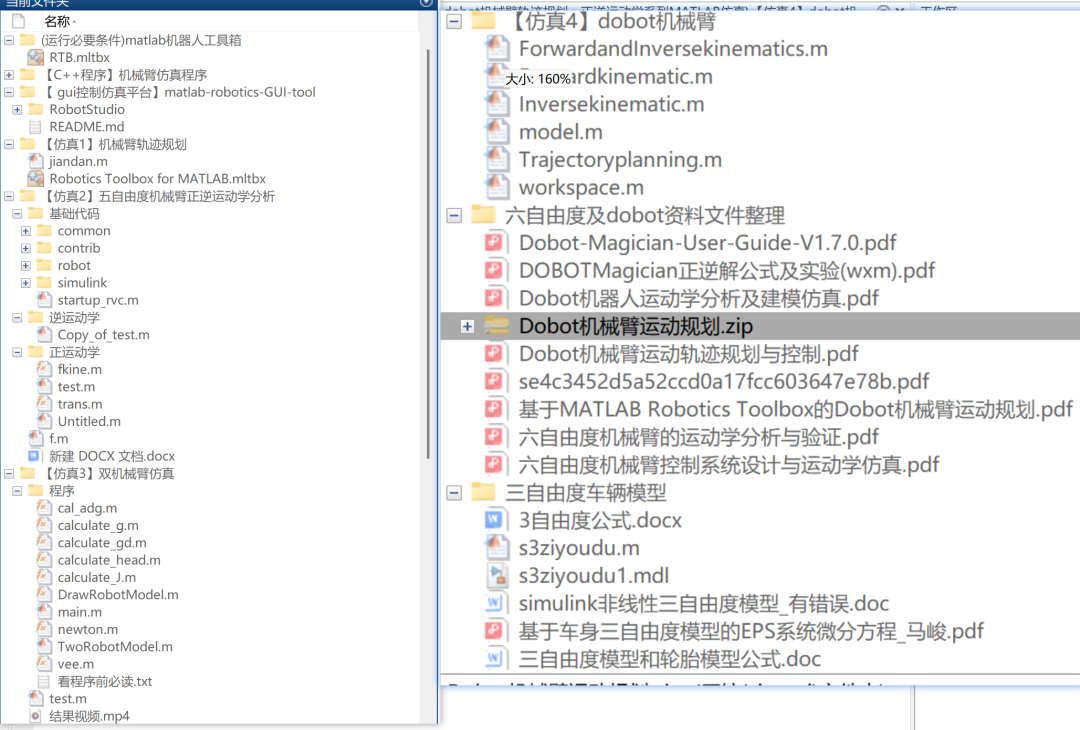
多种机械臂系列+五自由度机械臂、双机械臂+dobot机械臂轨迹规划、正逆运动学系列MATLAB仿真
在现代工业自动化、机器人技术以及智能制造等领域,机械臂作为一种关键设备,广泛应用于物料搬运、装配、焊接、喷涂等多种任务场景。不同类型的机械臂,如五自由度机械臂、双机械臂以及 dobot 机械臂等,各自具有独特的结构和功能特点,以适应多样化的工作需求。轨迹规划和正逆运动学分析是机械臂控制的核心技术。轨迹规划决定了机械臂如何从初始位置移动到目标位置,确保运动的平稳性、高效性以及满足任务的精度要求。正逆
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、背景
在现代工业自动化、机器人技术以及智能制造等领域,机械臂作为一种关键设备,广泛应用于物料搬运、装配、焊接、喷涂等多种任务场景。不同类型的机械臂,如五自由度机械臂、双机械臂以及 dobot 机械臂等,各自具有独特的结构和功能特点,以适应多样化的工作需求。
轨迹规划和正逆运动学分析是机械臂控制的核心技术。轨迹规划决定了机械臂如何从初始位置移动到目标位置,确保运动的平稳性、高效性以及满足任务的精度要求。正逆运动学则是建立机械臂关节空间与操作空间之间的映射关系,为轨迹规划和实时控制提供理论基础。深入理解这些技术的背景和原理,对于机械臂的设计、优化以及实际应用至关重要。
二、原理
(一)多种机械臂结构特点
-
五自由度机械臂:五自由度机械臂通常具有五个可活动关节,这些关节的组合赋予机械臂在三维空间内较为灵活的运动能力。一般包括肩部的旋转关节、肘部的屈伸关节、腕部的旋转和屈伸关节等。这种结构设计使机械臂能够在一定空间范围内进行复杂的姿态调整,适用于一些对操作灵活性要求较高但对空间定位精度要求相对不那么苛刻的任务,如在特定区域内的物料抓取和放置。
-
双机械臂:双机械臂系统由两个独立的机械臂组成,它们可以协同工作。双机械臂能够完成一些单机械臂难以实现的任务,例如共同搬运大型或不规则形状的物体、进行更复杂的装配操作等。两个机械臂之间需要精确的协调和同步,以确保任务的顺利执行。这种协同工作要求对双机械臂的轨迹规划和控制算法提出了更高的要求,不仅要考虑单个机械臂的运动,还要考虑两个机械臂之间的相互作用和避障问题。
-
dobot 机械臂:dobot 机械臂是一种常见的桌面型机械臂,具有结构紧凑、成本较低、易于编程等特点。它通常具备多个自由度,能够实现平面或空间内的基本运动。由于其体积小巧、操作简便,广泛应用于教育、科研以及一些小型生产制造场景,如小型零件的装配、3D 打印辅助操作等。
(二)轨迹规划原理
-
规划目标:轨迹规划的主要目标是在满足机械臂运动学和动力学约束的前提下,生成一条从初始位置到目标位置的最优运动轨迹。这里的 “最优” 可以根据具体任务需求来定义,例如最短运动时间、最小能量消耗、最小冲击等。在实际应用中,通常需要综合考虑多个因素来确定最优轨迹。
-
规划方法:常见的轨迹规划方法包括基于几何的方法和基于优化的方法。基于几何的方法,如直线插补和圆弧插补,简单直观,适用于一些对轨迹精度要求不高的场景。直线插补是在初始点和目标点之间通过线性计算生成一系列中间点,机械臂沿着这些点依次运动,形成直线轨迹;圆弧插补则是用于生成圆弧轨迹。基于优化的方法则更加复杂和灵活,它通过建立目标函数(如运动时间、能量消耗等)和约束条件(如关节角度限制、速度限制、加速度限制等),利用优化算法(如遗传算法、粒子群算法等)求解最优的轨迹参数。这种方法能够更好地满足复杂任务对机械臂运动性能的要求。
(三)正运动学原理
-
坐标变换:正运动学是研究如何根据机械臂各关节的角度来确定末端执行器在空间中的位置和姿态。这一过程基于坐标变换原理,通过建立各个关节坐标系之间的关系,将关节空间的变量(关节角度)转换为操作空间的变量(位置和姿态)。通常使用齐次变换矩阵来描述坐标系之间的平移和旋转关系。对于一个具有 n 个关节的机械臂,从基坐标系到末端执行器坐标系的变换可以通过 n 个齐次变换矩阵依次相乘得到,即 T0n=T01T12⋯T(n−1)n,其中 Tij 表示从第 i 个关节坐标系到第 j 个关节坐标系的齐次变换矩阵。通过这种方式,可以精确计算出末端执行器在空间中的位置和姿态。
(四)逆运动学原理
-
求解关节角度:逆运动学则是正运动学的逆过程,即已知末端执行器在空间中的目标位置和姿态,求解机械臂各关节所需的角度。逆运动学问题通常比正运动学问题更复杂,因为对于给定的末端位置和姿态,可能存在多个解(多解性),或者在某些情况下无解(运动学奇异)。求解逆运动学的方法有多种,如解析法和数值法。解析法通过对机械臂的运动学方程进行数学推导,直接求解关节角度,这种方法适用于结构相对简单的机械臂,能够得到精确解,但推导过程可能较为复杂。数值法如牛顿 - 拉夫逊迭代法等,通过迭代计算逐步逼近满足目标位置和姿态的关节角度,这种方法适用于各种复杂结构的机械臂,但计算量较大,并且可能存在收敛性问题。在实际应用中,需要根据机械臂的具体结构和任务需求选择合适的逆运动学求解方法。
多种机械臂系列通过轨迹规划和正逆运动学分析等核心技术,实现了在不同任务场景下的高效、精确操作。这些技术的不断发展和完善,推动了机械臂在工业生产、科学研究以及日常生活等各个领域的广泛应用和创新发展。
⛳️ 运行结果
🔗 参考文献
🍅往期回顾扫扫下方二维码

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献170条内容
已为社区贡献170条内容

所有评论(0)