Point-LIO(一)论文
本文介绍了 Point-LIO:一种具有高带宽和鲁棒性的 Lidar-Imu 里程计,能够估计极为激烈的机器人运动。Point-LIO有两个关键创新。第一个创新是逐点 LIO 框架,该框架在每个LiDAR点测量时更新状态。该框架允许极高频率的里程计输出,显著增加了里程计带宽,从根本上消除了帧内运动畸变。第二个创新是采用随机过程增强的运动学模型,模型将IMU测量作为输出。这个新的建模方法使得在激烈运
Point-LIO: 一个能够应对剧烈运动的激光雷达惯性里程计
注: 如果在没有IMU的情况下使用Point-LIO,将imu_en设置为false,并在yaml文件中尽可能提供一个预定义的重力值,将gravity_init设置为true,并保持use_imu_as_input为0。
1.主要贡献
Point-LIO:一种具有高带宽和鲁棒性的 Lidar-Imu 里程计,能够估计极为激烈的机器人运动。Point-LIO有两个关键创新。
- 提出了一种逐点 LIO框架,该框架在实际采样时间融合激光雷达点,而不会累积到帧中。去除点累积消除了帧内运动失真,并允许以接近点采样率的高里程计输出和建图更新,这进一步使系统能够跟踪非常快的运动;
- 为了进一步提高系统带宽到超出IMU测量范围,用随机过程模型对IMU测量进行建模。将该模型扩展到系统运动学中,并将IMU测量值视为系统输出。即使IMU饱和,随机过程增强的运动学模型也可以平滑估计系统状态(包括角速度和线加速度);
- 将这两个关键技术集成到一个完全紧耦合的LIO系统中,称为Point-LIO。系统使用流形扩展卡尔曼滤波器,通过在其各自的采样时间融合每个LiDAR点或IMU数据来更新系统状态。通过利用系统的稀疏性和线性,所开发的系统甚至在低功耗的基于高级精简指令集(ARM)计算机的微型无人飞行器(UAV)上也能实现实时状态估计;
- 开发的系统在多种挑战性的实际数据集上进行了测试,这些数据集来自一种具有非常小视场(FoV)的新兴固态激光雷达。结果表明,Point-LIO能够有效补偿运动畸变,提供高频率的里程计输出(4–8 kHz)和高带宽(>150Hz)。该系统还能够在极其激烈的运动下(角速度超过75rad/s)进行状态估计,即使在初期后IMU测量已经饱和。此外,在来自多个开源激光雷达数据集的12个序列上的详尽基准对比表明,Point-LIO在准确性和效率方面始终与其他同行系统相当,同时消耗的计算资源较少。最后,展示了该系统在实际无人机(UAV)上的应用。
2.系统框架
其设计理念主要基于:
- LiDAR点是在相应的时间顺序采样的,而不是同时采样的帧;
- IMU数据是系统的测量(输出),而不是输入。
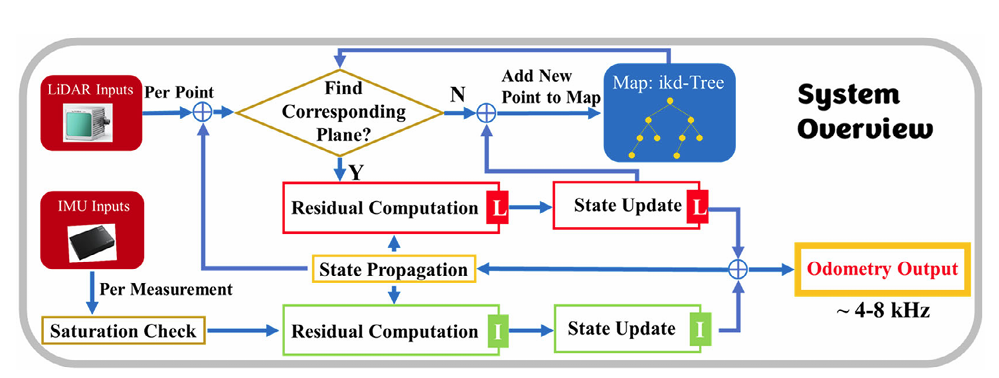
接收到每个测量值(即LiDAR点或IMU数据),就将其在流形扩展卡尔曼滤波器框架中融合。顺序采样的LiDAR点和IMU数据都用于在各自的时间戳更新状态,从而得到极高频率(4-8 kHz)的里程计输出。
具体来说,对于接收到的每个 LiDAR 点,都会从地图中搜索相应的平面。如果该点与由地图中的点拟合的平面匹配,则计算残差以使用流形卡尔曼滤波器更新系统状态。优化后的位姿最终将LiDAR点注册到全局框架中并合并到地图中,之后继续处理下一个测量值(激光雷达点或IMU数据)。否则,如果该点没有匹配的平面,则通过卡尔曼滤波器预测的位姿将其直接添加到地图中。
为了在接纳新注册点的同时快速进行平面对应搜索,我们使用了增量k-d树结构(ikd-Tree),该结构最初是在FAST-LIO2中开发的。对于每个IMU测量,我们分别进行每个通道的饱和检查,已饱和的通道将不用于状态更新。
3.状态估计
3.1符号说明
为了简化解释,我们采用以下符号表示法。
| 符号 | 含义 |
|---|---|
| xkx_kxk | 第 kkk 次测量采样时刻的状态 xxx |
| xxx | 状态 xxx 的真实值 |
| x^,xˉ\hat{x}, \bar{x}x^,xˉ | 传播和更新后的状态 xxx 的值 |
| δx\delta xδx | 真实状态 xxx 与其估计 x^\hat{x}x^ 之间的误差 |
然后是定义的广义加法和广义减法(fast-lio中已经多次接触过)
[Ra]⊕[rb]=[R⊕ra+b]=[R⋅Exp(r)a+b] \left[ \begin{array}{c} R \\ a \end{array} \right] \oplus \left[ \begin{array}{c} r \\ b \end{array} \right] = \left[ \begin{array}{c} R \oplus r \\ a + b \end{array} \right] = \left[ \begin{array}{c} R \cdot \text{Exp}(r) \\ a + b \end{array} \right] [Ra]⊕[rb]=[R⊕ra+b]=[R⋅Exp(r)a+b][R1a]⊖[R2b]=[R1⊖R2a−b]=[Log(R2T⋅R1)a−b](1) \left[ \begin{array}{c} R_1 \\ a \end{array} \right] \ominus \left[ \begin{array}{c} R_2 \\ b \end{array} \right] = \left[ \begin{array}{c} R_1 \ominus R_2 \\ a - b \end{array} \right] = \left[ \begin{array}{c} \text{Log}(R_2^T \cdot R_1) \\ a - b \end{array} \right] \tag{1} [R1a]⊖[R2b]=[R1⊖R2a−b]=[Log(R2T⋅R1)a−b](1)
3.2运动学模型
首先推导出系统模型,该模型由状态转移模型和测量模型组成。
状态转移模型
以 IMU 帧为 body 帧,第一个 IMU 坐标系为全局坐标系,连续运动学模型为
GR˙I=GRI⌊Iω⌋,Gp˙I=GvI,Gv˙I=GRIIa+Gg,Gg˙=0b˙g=nbg,b˙a=nba,Iω˙=wg,Ia˙=wa(2) \begin{array}{l} { }^{G} \dot{\mathbf{R}}_{I}={ }^{G} \mathbf{R}_{I}\left\lfloor{ }^{I} \boldsymbol{\omega}\right\rfloor,{ }^{G} \dot{\mathbf{p}}_{I}={ }^{G} \mathbf{v}_{I},{ }^{G} \dot{\mathbf{v}}_{I}={ }^{G} \mathbf{R}_{I}{ }^{I} \mathbf{a}+{ }^{G} \mathbf{g},{ }^{G} \dot{\mathbf{g}}=\mathbf{0} \\ \dot{\mathbf{b}}_{g}=\mathbf{n}_{\mathrm{b}_{g}}, \dot{\mathbf{b}}_{a}=\mathbf{n}_{\mathrm{b}_{a}},{ }^{I} \dot{\boldsymbol{\omega}}=\mathbf{w}_{g},{ }^{I} \dot{\mathbf{a}}=\mathbf{w}_{a} \end{array} \tag{2} GR˙I=GRI⌊Iω⌋,Gp˙I=GvI,Gv˙I=GRIIa+Gg,Gg˙=0b˙g=nbg,b˙a=nba,Iω˙=wg,Ia˙=wa(2)
其中,
-
GRI,GpI,GvI{ }^{G} \mathbf{R}_{I},{ }^{G} \mathbf{p}_{I},{ }^{G} \mathbf{v}_{I}GRI,GpI,GvI 分别表示全局坐标系中IMU的姿态、位置和速度;
-
Gg{ }^{G} \mathbf{g}Gg 是全局坐标系中的重力矢量;
-
bgb_gbg 和 bab_aba 是由高斯噪声驱动的随机游走IMU偏置,分别记为 nb∼N(0,Qb)n_b \sim \mathcal{N}(0, Q_b)nb∼N(0,Qb) 和 na∼N(0,Qb)n_a \sim \mathcal{N}(0, Q_b)na∼N(0,Qb);
-
符号 ⌊a⌋\left\lfloor{ }^{} \boldsymbol{a}\right\rfloor⌊a⌋ 表示 a∈R3a\in \mathbb{R}^3a∈R3 中的反对称矩阵;
-
Iω{}^{I}\mathbf{\omega}Iω 和 Ia{}^{I}\mathbf{a}Ia 分别表示IMU在自身坐标系的角速度和加速度。(也就是测量值)
连续模型(2) 随后在每个测量步骤 kkk 处进行离散化。设 Δtk\Delta t_kΔtk 为当前的测量间隔,它是上一个测量(IMU数据或激光雷达点)与当前测量(IMU数据或激光雷达点)之间的时间差。通过假设输入在间隔 Δtk\Delta t_kΔtk 内保持恒定,连续模型被离散化,得到:
xk+1=xk⊞(Δtk f(xk,wk))(3) x_{k+1} = x_k \boxplus \left(\Delta t_k\, f(x_k, w_k)\right) \tag{3} xk+1=xk⊞(Δtkf(xk,wk))(3)
状态量 xxx,函数fff,以及噪声www 定义为:
M≜SO(3)×R21dim(M)=24 \mathcal{M}\triangleq SO(3)\times\mathbb{R}^{21} \operatorname{dim}(\mathcal{M})=24 M≜SO(3)×R21dim(M)=24x≜[GRIGpIGvIbgbaGgIωIa] \mathbf{x}\triangleq\left[\begin{array}{llllllll}{}^{G}\mathbf{R}_{I} & {}^{G}\mathbf{p}_{I} & {}^{G}\mathbf{v}_{I} & \mathbf{b}_{g} & \mathbf{b}_{a} & {}^{G}\mathbf{g} & {}^{I}{\omega} & {}^{I}\mathbf{a}\end{array}\right] x≜[GRIGpIGvIbgbaGgIωIa]w≜[nbgnbawgwa]≈N(0,Q) \mathbf{w}\triangleq\left[\begin{array}{llll}\mathbf{n}_{b_{g}} & \mathbf{n}_{b_{a}} & \mathbf{w}_{g} & \mathbf{w}_{a}\end{array}\right]\approx\mathcal{N}(\mathbf{0},\mathcal{Q}) w≜[nbgnbawgwa]≈N(0,Q)f(x,w)≜[IωGvIGRIIa+Ggnbgnba03×1wgwa](4) \mathbf{f}(\mathbf{x}, \mathbf{w}) \triangleq \left[ \begin{array}{llllllll} {}^{I} \boldsymbol{\omega} & {}^{G} \mathbf{v}_I & {}^{G} \mathbf{R}_I {}^{I} \mathbf{a} + {}^{G} \mathbf{g} & \mathbf{n}_{b_g} & \mathbf{n}_{b_a} & \mathbf{0}_{3 \times 1} & \mathbf{w}_g & \mathbf{w}_a \end{array} \right] \tag{4} f(x,w)≜[IωGvIGRIIa+Ggnbgnba03×1wgwa](4)
注:Point-LIO代码中的get_f_output 对应此处的 f(x,w)。get_f_input 对应Fast-LIO的 f(x,u,w)
观测模型
该系统有两个测量值,一个 LiDAR 点或一个 IMU 数据(包括角速度和加速度测量值)。这两个测量值通常在不同时间被系统采样和接收,因此我们分别对它们进行建模。
假设 LiDAR 坐标系与 IMU 坐标系重合或已预先校准了外部参数 (外参标定),则LIDAR点 Ipmk{ }^{I} \mathbf{p}_{\mathrm{m}_{k}}Ipmk 等于在IMU 坐标系 Ipkgt{ }^{I} \mathbf{p}_{k}^{\mathrm{gt}}Ipkgt的真实位置,受到高斯噪声的影响
Ipmk=Ipkgt+nLk(5) { }^{I} \mathbf{p}_{\mathrm{m}_{k}}={ }^{I} \mathbf{p}_{k}^{\mathrm{gt}}+\mathbf{n}_{\mathrm{L}_{k}} \tag{5} Ipmk=Ipkgt+nLk(5)
在使用真实(未知)IMU 位姿 GTIk=(GRIk,GpIk){ }^{G} \mathbf{T}_{\mathrm{I}_{k}} = ({ }^{G} \mathbf{R}_{\mathrm{I}_{k}},{ }^{G} \mathbf{p}_{\mathrm{I}_{k}})GTIk=(GRIk,GpIk) 投影到全局坐标系,该真实点应恰好位于地图中的局部小平面块上(图2),即:
0=GukT(GTIk(Ipmk−nLk)−Gqk)⏟hL(xk,Ipmk,nLk)(6) 0=\underbrace{^{G}\mathbf{u}_{k}^{T}\left(^{G}\mathbf{T}_{I_{k}}\left(^{I}\mathbf{p}_{\mathrm{m}_{k}}-\mathbf{n}_{\mathrm{L}_{k}}\right)-^{G}\mathbf{q}_{k}\right)}_{\mathbf{h}_{\mathrm{L}}\left(\mathbf{x}_{k},{}^{I}\mathbf{p}_{\mathrm{m}_{k}},\mathbf{n}_{\mathrm{L}_{k}}\right)} \tag{6} 0=hL(xk,Ipmk,nLk)
GukT(GTIk(Ipmk−nLk)−Gqk)(6)
其中,Guk{ }^{G} \mathbf{u}_{\mathrm{}_{k}}Guk 是相应平面的法向量,Gqk{ }^{G} \mathbf{q}_{\mathrm{}_{k}}Gqk 是平面上的任意点。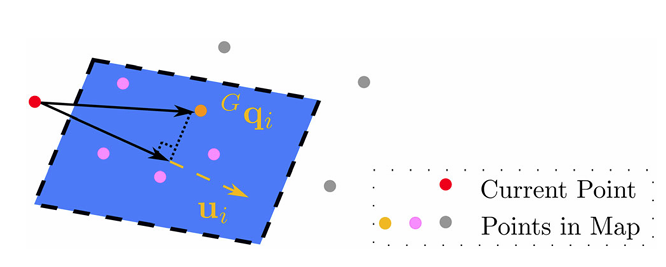
IMU测量由角速度测量Iωm{ }^{I} \mathbf{\omega }_{\mathrm{}_{m}}Iωm 和 加速度测量Iam{ }^{I} \mathbf{a}_{\mathrm{}_{m}}Iam 组成:
[IωmkIamk]=[Iωk+bgk+ngkIak+bak+nak]⏟hI(xk,nIk) \left[\begin{array}{c} { }^{I} \boldsymbol{\omega}_{\mathrm{m}_{k}} \\ { }^{I} \mathbf{a}_{\mathrm{m}_{k}} \end{array}\right]=\underbrace{\left[\begin{array}{c} { }^{I} \boldsymbol{\omega}_{k}+\mathbf{b}_{\mathrm{g}_{k}}+\mathbf{n}_{\mathrm{g}_{k}} \\ { }^{I} \mathbf{a}_{k}+\mathbf{b}_{\mathrm{a}_{k}}+\mathbf{n}_{\mathrm{a}_{k}} \end{array}\right]}_{\mathbf{h}_{I}\left(\mathbf{x}_{k}, \mathbf{n}_{I_{k}}\right)} [IωmkIamk]=hI(xk,nIk)
[Iωk+bgk+ngkIak+bak+nak]
综上所述, 系统的观测模型可以用以下紧凑的形式表示
0=hL(xk,Ipmk,nLk) 0 = \mathbf{h}_L(\mathbf{x}_k, {}^I \mathbf{p}_{\mathrm{m}_k}, \mathbf{n}_{L_k}) 0=hL(xk,Ipmk,nLk)[IωmkIamk]=hI(xk,nIk)(8) \begin{bmatrix} {}^I \boldsymbol{\omega}_{\mathrm{m}_k} \\ {}^I \mathbf{a}_{\mathrm{m}_k} \end{bmatrix} = \mathbf{h}_I(\mathbf{x}_k, \mathbf{n}_{I_k}) \tag{8} [IωmkIamk]=hI(xk,nIk)(8)
3.3扩展卡尔曼滤波器
紧耦合的 EKF 用于 Point-LIO 的状态估计
状态传播
假设我们已经接收到直到步骤 k 的测量,并且在该时间步的更新状态为 xkˉ\bar{x_k}xkˉ ,同时更新了协方差矩阵PkP_kPk .从步骤 k 到下一个测量步骤 k+1 的状态传播直接遵循状态转移模型(方程 (3)),并设置 wkw_kwk=0
x^k+1=x‾k⊞(Δtkf(x‾k,0))(9) \hat{\mathbf{x}}_{k+1}=\overline{\mathbf{x}}_{k} \boxplus\left(\Delta t_{k} \mathbf{f}\left(\overline{\mathbf{x}}_{k}, \mathbf{0}\right)\right) \tag{9} x^k+1=xk⊞(Δtkf(xk,0))(9)
协方差传播如下:
P^k+1=FxkP‾kFxkT+FwkQkFwkT(10) \hat{\mathbf{P}}_{k+1}=\mathbf{F}_{\mathbf{x}_{k}} \overline{\mathbf{P}}_{k} \mathbf{F}_{\mathbf{x}_{k}}^{T}+\mathbf{F}_{\mathbf{w}_{k}} \mathcal{Q}_{k} \mathbf{F}_{\mathbf{w}_{k}}^{T} \tag{10} P^k+1=FxkPkFxkT+FwkQkFwkT(10)
残差计算
LiDAR 测量: 使用从卡尔曼传播(方程(9))得到的预测位姿 GT^Ik+1=(GR^Ik+1,Gp^Ik+1){ }^{G} \hat{\mathbf{T}}_{I_{k+1}}=\left({ }^{G} \hat{\mathbf{R}}_{I_{k+1}},{ }^{G} \hat{\mathbf{p}}_{I_{k+1}}\right)GT^Ik+1=(GR^Ik+1,Gp^Ik+1) ,将测量得到的LIDAR点投影到全局坐标系Gp^k+1=GR^Ik+1Ipmk+1+Gp^Ik+1{ }^G \hat{\mathbf{p}}_{k+1}={ }^G \hat{\mathbf{R}}_{I_{k+1}}{ }^I \mathbf{p}_{m_{k+1}}+{ }^G \hat{\mathbf{p}}_{I_{k+1}}Gp^k+1=GR^Ik+1Ipmk+1+Gp^Ik+1 ,并在由 kd-Tree 组成的地图中搜索其最近的五个点。
然后使用找到的最近邻点来拟合具有法向量和质心的局部小平面(如测量模型中所示,参见方程(6)和图2)。如果这五个最近点不在平面路径上(即,任何点距离平面大于 0.1 米),当前的 LiDAR 测量会直接合并到地图中,而无需残差计算或状态更新。否则,如果局部平面成功拟合,则根据方程(8)计算残差
rLk+1=0−hL(x^k+1,Ipmk+1,0)=hL(xk+1,Ipmk+1,nLk+1)−hL(x^k+1,Ipmk+1,0)≈HLk+1δxk+1+DLk+1nLk+1(12) \begin{aligned} \mathbf{r}_{\mathrm{L}_{k+1}} & =0-\mathbf{h}_{\mathrm{L}}\left(\hat{\mathbf{x}}_{k+1},{ }^I \mathbf{p}_{\mathrm{m}_{k+1}}, \mathbf{0}\right) \\ & =\mathbf{h}_{\mathrm{L}}\left(\mathbf{x}_{k+1},{ }^I \mathbf{p}_{\mathrm{m}_{k+1}}, \mathbf{n}_{\mathrm{L}_{k+1}}\right)-\mathbf{h}_{\mathrm{L}}\left(\hat{\mathbf{x}}_{k+1},{ }^I \mathbf{p}_{\mathrm{m}_{k+1}}, \mathbf{0}\right) \\ & \approx \mathbf{H}_{\mathrm{L}_{k+1}} \delta \mathbf{x}_{k+1}+\mathbf{D}_{\mathrm{L}_{k+1}} \mathbf{n}_{\mathrm{L}_{k+1}} \end{aligned} \tag{12} rLk+1=0−hL(x^k+1,Ipmk+1,0)=hL(xk+1,Ipmk+1,nLk+1)−hL(x^k+1,Ipmk+1,0)≈HLk+1δxk+1+DLk+1nLk+1(12)
IMU 测量:对于 IMU 测量,我们首先通过检查当前测量值与额定测量范围之间的差距来评估 IMU 的任何通道是否饱和。如果间隙太小,则丢弃该通道的IMU测量而不更新状态。然后,收集来自不饱和 IMU 通道的加速度和角速度测量值,以根据等式(7)计算 IMU 残差
rIk+1=[Iωmk+1Iamk+1]T−hI(x^k+1,0)=hI(xk+1,nIk+1)−hI(x^k+1,0)=HIk+1δxk+1+DIk+1nIk+1(14) \begin{aligned} \mathbf{r}_{I_{k+1}} & =\left[\begin{array}{c} { }^I \boldsymbol{\omega}_{\mathrm{m}_{k+1}} \\ { }^I \mathbf{a}_{\mathrm{m}_{k+1}} \end{array}\right]^T-\mathbf{h}_I\left(\hat{\mathbf{x}}_{k+1}, \mathbf{0}\right) \\ & =\mathbf{h}_I\left(\mathbf{x}_{k+1}, \mathbf{n}_{I_{k+1}}\right)-\mathbf{h}_I\left(\hat{\mathbf{x}}_{k+1}, \mathbf{0}\right) \\ & =\mathbf{H}_{I_{k+1}} \delta \mathbf{x}_{k+1}+\mathbf{D}_{I_{k+1}} \mathbf{n}_{I_{k+1}} \end{aligned} \tag{14} rIk+1=[Iωmk+1Iamk+1]T−hI(x^k+1,0)=hI(xk+1,nIk+1)−hI(x^k+1,0)=HIk+1δxk+1+DIk+1nIk+1(14)
状态更新
更新后的状态与协方差矩阵一起用于下一个测量的传播,状态估计整体过程在算法1中进行了总结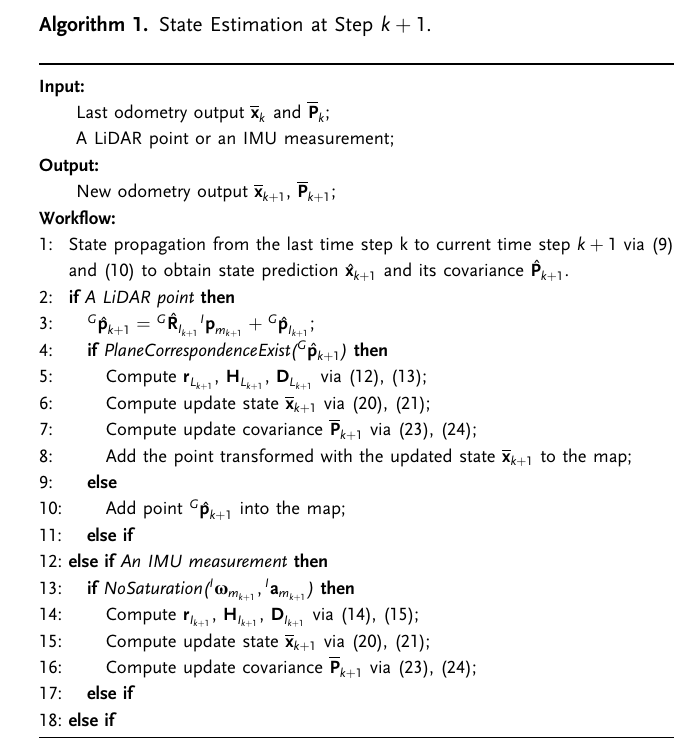

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)