IoT DevOps实战:基于设备影子(Shadow)的万级机器人梯控集群自动化运维架构
得益于 MQTT 的 QoS 1 级别和设备影子机制,即使设备在地下室断网 3 天,只要 4G 信号恢复,设备会立即拉取最新的 Shadow 文档。:运维人员只需在云端修改“期望配置(Desired)”,无论设备当前是否在线,一旦联网,它会自动同步并反馈“当前配置(Reported)”,最终实现状态一致(Eventual Consistency)。当开发人员提交新的梯控逻辑代码时,流水线自动触发测
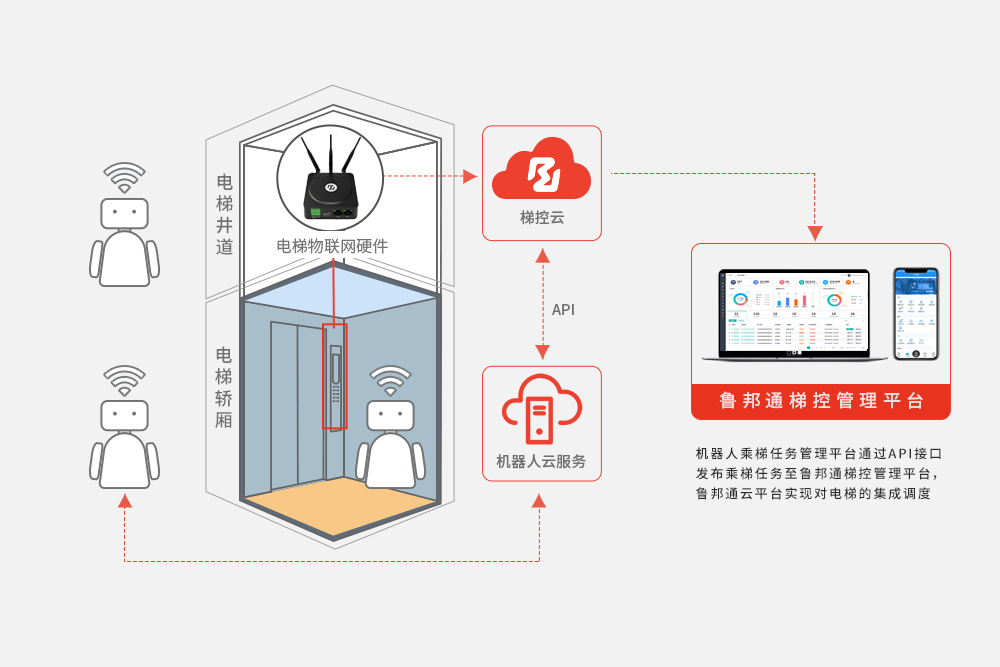
摘要: 当机器人梯控设备数量突破 10,000 台,传统的“SSH/VPN 单点登录”维护模式将成为运维灾难。如何确保分布在不同网络环境下的电梯网关配置一致性?如何实现固件的灰度发布(Canary Release)与回滚?本文将从架构设计角度,探讨一种基于“期望状态(Desired) vs 报告状态(Reported)”的自动化运维模型。我们将利用 鲁邦通 EC6200机器人梯控产品 对 Python 与 MQTT 的原生支持,构建一套 Infrastructure as Code(基础设施即代码)的垂直交通管理系统。
导语: 在 DevOps 领域,管理成千上万个 Docker 容器已是常态。但在物理世界,管理分散在全国楼宇井道内的机器人梯控网关却依然原始。网络抖动、IP 变动、固件版本碎片化是架构师必须面对的挑战。本文将展示如何利用 鲁邦通梯控管理平台 与边缘计算网关,将物理设备抽象为可编程的数字对象。
打破物理边界:利用数字孪生与边缘计算重构垂直交通运维体系

一、 架构演进:从“管道式”到“声明式”管理
在设计大规模 IoT 运维系统时,我们经历了三个阶段的演进:
- V1.0 隧道穿透时代(典型代表:传统 PLC + VPN)
- 架构:通过 OpenVPN 或蒲公英等组网工具,打通 PC 到现场 PLC 的通道。
- 痛点:这是“宠物模式”运维。工程师必须知道每台设备的 IP,逐一登录配置。一旦 VPN 掉线,运维即中断。且存在极大的内网安全隐患。
- V2.0 指令下发时代(典型代表:TCP 长连接)
- 架构:设备连接中心服务器,服务器推送 Hex 码流指令。
- 痛点:缺乏状态保持。如果下发指令时设备离线,指令丢失。设备上线后状态未知。
- V3.0 声明式影子时代(典型代表:鲁邦通 EC6200 + MQTT)
- 架构:EC6200机器人梯控产品 采用“设备影子(Device Shadow)”机制。
- 优势:运维人员只需在云端修改“期望配置(Desired)”,无论设备当前是否在线,一旦联网,它会自动同步并反馈“当前配置(Reported)”,最终实现状态一致(Eventual Consistency)。
二、 核心技术:MQTT Topic 设计与 JSON 协议规范
为了实现精细化管理,我们利用 EC6200机器人梯控产品 的 MQTT 客户端定义了以下 Topic 结构:
1. 配置下发 Topic (Subscribe):$robustel/elevator/{device_sn}/config/delta
- Payload 示例:
JSON
{
"version": "v2.1.0",
"timestamp": 1715068800,
"desired": {
"floor_mapping": {
"floor_1": "0x01",
"floor_5": "0x10"
},
"heartbeat_interval": 60
}
}2. 状态上报 Topic (Publish):$robustel/elevator/{device_sn}/status/update
- 用途:设备应用配置成功后,上报当前生效的版本号与配置 Hash 值,供云端审计。
三、 代码实战:构建闭环运维体系
本节将展示如何通过 Python 实现云端下发与边缘端执行的完整闭环。
1. 云端:批量配置灰度发布脚本(DevOps侧) 运维人员不应直接操作数据库,而应通过 API 脚本进行批量操作。以下脚本实现了对指定“区域(Region)”设备的灰度更新:
Python
import requests
import json
import time
# 鲁邦通梯控管理平台 API (模拟)
API_BASE = "https://api.robustel.net/v2"
API_TOKEN = "eyJhbGciOiJIUzI1..."
def canary_release_config(tag, config_payload, batch_size=50):
"""
灰度发布策略:
1. 获取带有特定标签(如 'region:shanghai')的设备列表
2. 分批次下发配置影子
3. 监控更新成功率,若失败率 > 5% 自动熔断
"""
headers = {"Authorization": f"Bearer {API_TOKEN}"}
# Step 1: 获取设备列表
devices = requests.get(
f"{API_BASE}/devices?tag={tag}", headers=headers
).json().get('data', [])
print(f"[INFO] Found {len(devices)} devices with tag: {tag}")
# Step 2: 分批执行
for i in range(0, len(devices), batch_size):
batch = devices[i:i+batch_size]
device_ids = [d['id'] for d in batch]
print(f"[DEPLOY] Pushing config to batch {i//batch_size + 1}...")
resp = requests.post(
f"{API_BASE}/shadow/update",
headers=headers,
json={
"device_ids": device_ids,
"shadow": {"desired": config_payload}
}
)
if resp.status_code != 200:
print(f"[ALARM] Batch failed! Stopping deployment. Error: {resp.text}")
break
# 模拟观察期
time.sleep(5)
print("[INFO] Deployment finished.")
# 执行灰度发布:将心跳改为 30秒
new_conf = {"heartbeat_interval": 30, "log_level": "DEBUG"}
# canary_release_config("pilot_project_A", new_conf)2. 边缘端:配置监听与热加载脚本(设备侧)EC6200机器人梯控产品 内置 RobustOS Pro 系统(基于 Linux),支持 Python 运行环境。以下代码运行在网关本地,负责监听配置变更并应用到底层梯控程序:
Python
# 运行在 EC6200 网关内部
import paho.mqtt.client as mqtt
import json
import subprocess
DEVICE_SN = "ROBU_ELEV_001"
BROKER = "127.0.0.1" # 本地 MQTT 桥接
def on_message(client, userdata, msg):
"""
收到云端配置 Delta 后的回调处理
"""
try:
payload = json.loads(msg.payload.decode())
desired_conf = payload.get('desired')
print(f"[EDGE] Received config update: {desired_conf}")
# 1. 校验配置合法性
if not validate_config(desired_conf):
report_status("REJECTED", "Invalid config format")
return
# 2. 应用配置 (例如写入本地配置文件)
with open('/app/elevator/config.json', 'w') as f:
json.dump(desired_conf, f)
# 3. 重载梯控服务 (SIGHUP 热加载)
subprocess.run(["killall", "-HUP", "elevator_daemon"])
# 4. 上报成功状态
report_status("APPLIED", payload.get('version'))
except Exception as e:
print(f"[ERROR] Config apply failed: {e}")
report_status("ERROR", str(e))
def report_status(status, detail):
topic = f"$robustel/elevator/{DEVICE_SN}/status/update"
data = json.dumps({"config_state": status, "detail": detail})
client.publish(topic, data)
client = mqtt.Client()
client.on_message = on_message
client.connect(BROKER, 1883, 60)
client.subscribe(f"$robustel/elevator/{DEVICE_SN}/config/delta")
client.loop_forever()四、 方案的工程化优势
- 断网续传与一致性保障 得益于 MQTT 的 QoS 1 级别和设备影子机制,即使设备在地下室断网 3 天,只要 4G 信号恢复,设备会立即拉取最新的 Shadow 文档。运维人员无需关心设备当前是否在线,只需关注“最终一致性”。
- 安全隔离(Security) 相比于 VPN 方案直接暴露内网端口,EC6200机器人梯控产品 仅通过出站连接(Outbound Connection)连接 鲁邦通梯控管理平台。本地防火墙默认拒绝所有入站请求,彻底杜绝了公网扫描攻击风险。
- 可观测性(Observability) 通过 API 集成,我们可以将 10,000 台设备的状态数据(CPU、内存、信号强度 RSRP)导入 Prometheus + Grafana。当某区域出现大规模信号衰减或 CPU 异常升高时,系统会自动触发 PagerDuty 告警。
五、 常见问题解答 (FAQ)
问题 1、批量升级固件时,带宽不够怎么办?
回答 1、支持错峰下载。 平台支持设定随机延迟(Random Jitter),例如让 1000 台设备在 02:00-04:00 之间随机时间点开始下载固件,避免瞬时流量拥塞导致基站过载。
问题 2、如何防止配置错误导致设备失联?
回答 2、支持配置回滚(Rollback)。 边缘端脚本具备“看门狗”机制。如果新配置应用后 5 分钟内无法连接云端,设备会自动恢复到上一个已知良好的配置版本(Last Known Good Configuration)。
问题 3、可以对接企业自有的 CI/CD 流水线吗?
回答 3、完全支持。 鲁邦通 提供的 RESTful API 可以直接集成到 Jenkins 或 GitLab CI 中。当开发人员提交新的梯控逻辑代码时,流水线自动触发测试环境的设备更新,实现硬件开发的 Agile 敏捷迭代。
结论: 在工业物联网时代,运维能力决定了产品的生命周期。鲁邦通 通过将 DevOps 理念引入垂直交通领域,利用 EC6200机器人梯控产品 强大的边缘计算能力与 鲁邦通梯控管理平台 的开放生态,真正实现了机器人梯控设备的自动化、规模化管理。对于架构师而言,这不仅仅是省钱,更是技术尊严的体现。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)