扫地机器人内螺旋全覆盖路径规划算法解析
内螺旋全覆盖路径规划算法是一种专为扫地机器人设计的智能清扫策略,能够在复杂室内环境中实现高效的区域覆盖。该算法模拟了人类清洁时的逻辑思维——从起点开始,沿着边界以螺旋方式向内推进,确保每个可到达区域都被清扫到。
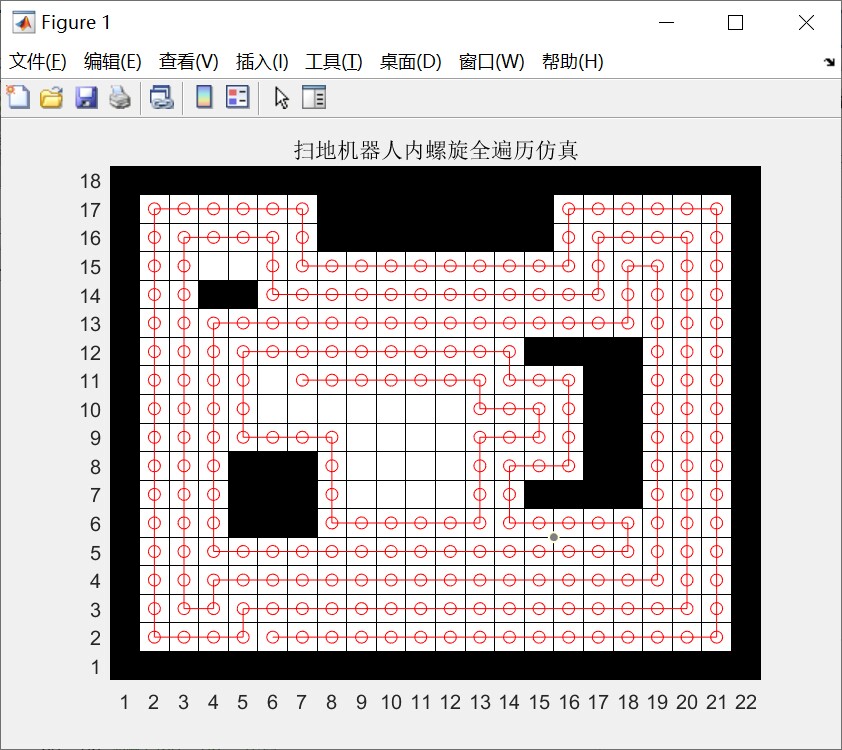
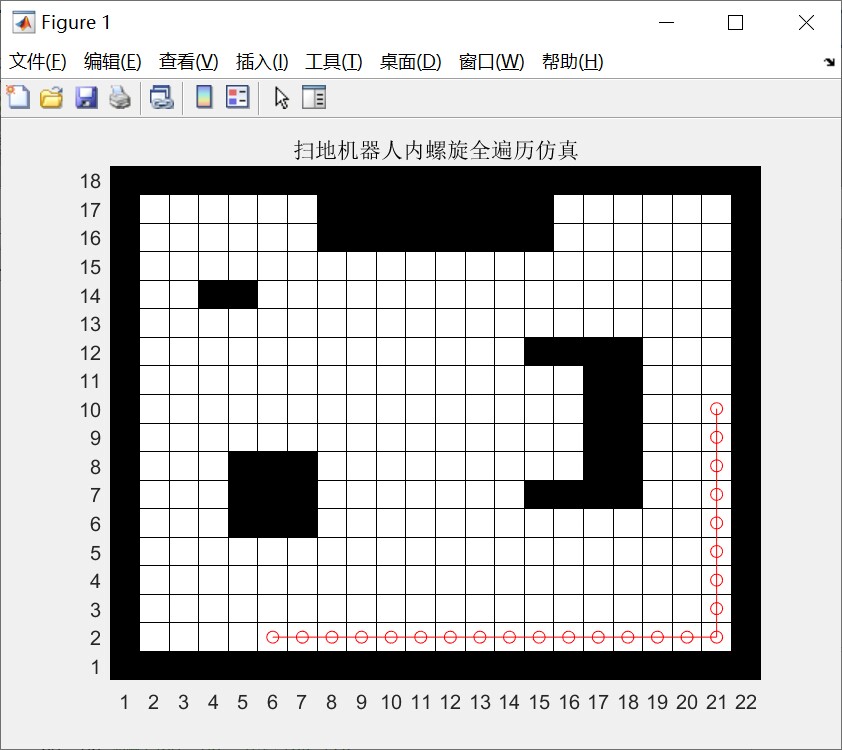
扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现,下列为运行图过程截图 这段代码是一个扫地机器人的仿真程序。程序的主要功能是模拟机器人在一个房间内清扫的过程。下面我将对程序进行详细的分析。 首先,程序创建了一个房间地图,地图的大小为22x18,表示房间的长和宽。地图是一个二维数组,每个元素表示一个栅格,初始值为1,表示可清扫的区域。然后,程序录入了障碍物的位置,将这些位置的栅格值设为0,表示障碍物。 接下来,程序生成了房间的栅格地图,并在图形界面上显示出来。黑色表示障碍物,白色表示可清扫的区域。 程序中定义了一些变量,如起点位置(m,n)、机器人的运动状态、机器人的四种运动方式等。 程序的主循环是一个while循环,条件是finish为1,表示清扫未完成。在循环中,根据机器人的运动状态,判断下一步的动作。如果右侧有空格,则向右转;如果前方有障碍物或已清扫的区域,则向左转;否则向前推进。 当机器人陷入死区或清扫完成时,进入一个内循环。内循环中,机器人会找到距当前位置最近的待清扫栅格,并规划出最短路径。机器人以当前位置为中心,一层一层往外扩散,查找栅格值为1的栅格位置。通过检查上下行和左右列,找到最近的待清扫栅格的位置。 如果没有找到待清扫栅格,则说明机器人已完成清扫,程序结束。否则,机器人根据最短路径移动到目标位置,并将目标位置的栅格值设为2,表示已清扫。 最后,程序在图形界面上显示机器人的移动路径,并通过pause函数暂停0.05秒,以便观察清扫过程。 需要注意的是,程序中还有一部分注释掉的代码,这部分代码是使用A*算法寻找最短路径的部分。根据程序的逻辑,当机器人陷入死区或清扫完成时,会调用这部分代码进行路径规划。但是由于注释掉了,所以实际上并没有使用A*算法。 这个程序主要是为了模拟扫地机器人在房间内清扫的过程。它涉及到的知识点包括二维数组的使用、条件判断、循环、图形界面的显示等。通过这个程序,可以了解到机器人在清扫过程中的运动策略和路径规划的思路。
算法概述
内螺旋全覆盖路径规划算法是一种专为扫地机器人设计的智能清扫策略,能够在复杂室内环境中实现高效的区域覆盖。该算法模拟了人类清洁时的逻辑思维——从起点开始,沿着边界以螺旋方式向内推进,确保每个可到达区域都被清扫到。
核心设计理念
该算法的核心思想基于“靠右行走”原则,机器人始终优先考虑右侧的可行走空间,通过系统的方向转换机制,在房间内形成自然的内螺旋覆盖路径。当遇到障碍物或已清扫区域时,算法会智能调整方向,确保覆盖的连续性。
环境建模与初始化
栅格地图构建
算法采用栅格法表示环境,将房间划分为均匀的网格单元:
0表示障碍物或墙壁1表示待清洁区域2表示已清洁区域
房间尺寸通过roomlength和roomwidth参数定义,障碍物位置通过obst数组指定,为算法提供了清晰的物理环境信息。
运动状态机设计
机器人运动被抽象为四种基本状态,形成一个完整的状态循环:
1. 横向右运动 (row_right)
- 优先检测右侧空间,如有未清扫区域则转向
- 前方遇到障碍或已清扫区域时左转
- 否则继续向前推进
2. 竖向上运动 (columns_up)
- 检测逻辑与横向运动相似,但方向调整为垂直
- 保持靠右行走的核心原则
3. 横向左运动 (row_left)
- 逆向水平移动时的状态转换
- 确保在边界处的合理转向
4. 竖向下运动 (columns_down)
- 垂直方向的下行运动处理
- 完成一个完整的方向循环
死区处理机制
算法最具创新性的部分是其智能死区处理能力。当机器人检测到陷入局部死区(四周无可清扫区域但全局仍有未覆盖区域)时,会启动分层搜索策略:
分层扩散搜索
- 初始搜索层:从当前位置开始,以层级h=1向外扩展
- 范围界定:计算搜索边界(r1, r2, c1, c2),考虑房间物理限制
- 优先级搜索:采用从中间向两边的检查顺序,提高搜索效率
- 动态扩展:如当前层未找到目标,自动扩展到下一层继续搜索
终止条件判断
当搜索达到房间物理边界且未发现待清扫区域时,算法判定清扫任务完成,优雅退出主循环。
可视化与实时监控
算法集成了实时可视化功能,通过MATLAB的图形界面:
- 动态显示机器人运动轨迹
- 使用不同颜色区分障碍物、已清扫和待清扫区域
- 提供0.05秒的步进暂停,便于观察算法执行过程
算法优势与特点
- 高覆盖率:内螺旋模式确保系统性的区域覆盖
- 障碍物适应:能够智能绕行各种形状的障碍物
- 死区恢复:具备从局部最优解中逃脱的能力
- 路径优化:减少重复路径,提高清扫效率
- 实时性:计算复杂度适中,适合嵌入式系统实现
应用场景扩展
虽然该算法专为扫地机器人设计,但其核心思想可广泛应用于:
- 农业喷洒机器人
- 安保巡逻机器人
- 工业检测设备
- 无人机区域勘察
该内螺旋全覆盖算法通过巧妙的状态机设计和分层搜索策略,实现了在复杂环境中的智能路径规划,为自主移动机器人的全覆盖任务提供了可靠的技术解决方案。
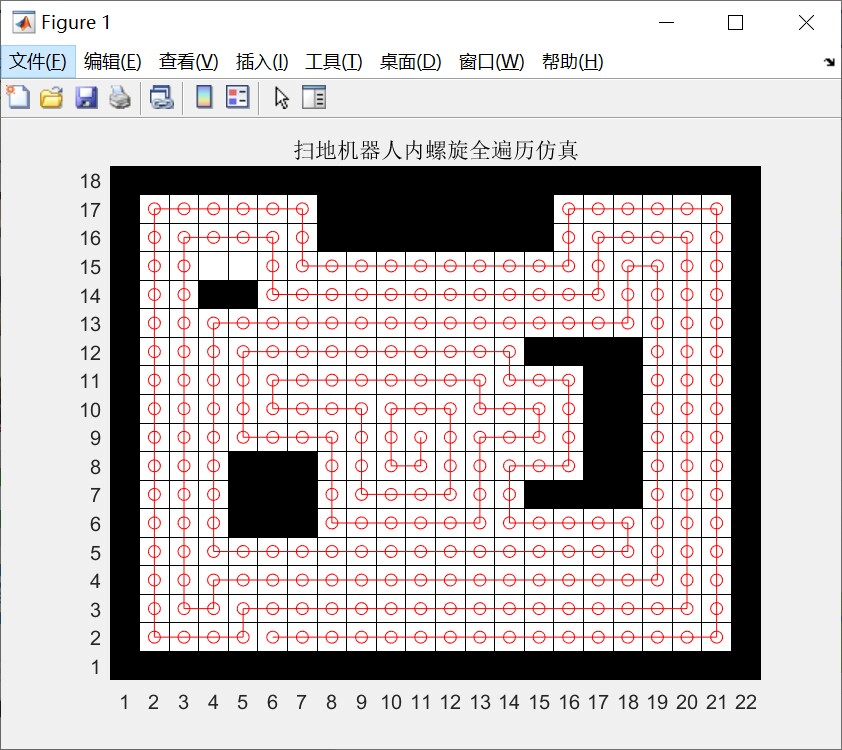
扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现,下列为运行图过程截图 这段代码是一个扫地机器人的仿真程序。程序的主要功能是模拟机器人在一个房间内清扫的过程。下面我将对程序进行详细的分析。 首先,程序创建了一个房间地图,地图的大小为22x18,表示房间的长和宽。地图是一个二维数组,每个元素表示一个栅格,初始值为1,表示可清扫的区域。然后,程序录入了障碍物的位置,将这些位置的栅格值设为0,表示障碍物。 接下来,程序生成了房间的栅格地图,并在图形界面上显示出来。黑色表示障碍物,白色表示可清扫的区域。 程序中定义了一些变量,如起点位置(m,n)、机器人的运动状态、机器人的四种运动方式等。 程序的主循环是一个while循环,条件是finish为1,表示清扫未完成。在循环中,根据机器人的运动状态,判断下一步的动作。如果右侧有空格,则向右转;如果前方有障碍物或已清扫的区域,则向左转;否则向前推进。 当机器人陷入死区或清扫完成时,进入一个内循环。内循环中,机器人会找到距当前位置最近的待清扫栅格,并规划出最短路径。机器人以当前位置为中心,一层一层往外扩散,查找栅格值为1的栅格位置。通过检查上下行和左右列,找到最近的待清扫栅格的位置。 如果没有找到待清扫栅格,则说明机器人已完成清扫,程序结束。否则,机器人根据最短路径移动到目标位置,并将目标位置的栅格值设为2,表示已清扫。 最后,程序在图形界面上显示机器人的移动路径,并通过pause函数暂停0.05秒,以便观察清扫过程。 需要注意的是,程序中还有一部分注释掉的代码,这部分代码是使用A*算法寻找最短路径的部分。根据程序的逻辑,当机器人陷入死区或清扫完成时,会调用这部分代码进行路径规划。但是由于注释掉了,所以实际上并没有使用A*算法。 这个程序主要是为了模拟扫地机器人在房间内清扫的过程。它涉及到的知识点包括二维数组的使用、条件判断、循环、图形界面的显示等。通过这个程序,可以了解到机器人在清扫过程中的运动策略和路径规划的思路。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)