某大型工厂“十五五”基于Agent的柔性制造排程与黑灯工厂建设方案深度解读(WORD)
面向“十五五”智能制造转型需求,某工厂提出基于多Agent协同调度与人形机器人集群的“黑灯工厂”方案。针对传统自动化在柔性排程、高危作业和资源利用率等方面的痛点,方案构建四大核心模块:1)分布式多Agent柔性排程中枢,采用改进合同网协议实现秒级重调度;2)人形机器人集群,通过3D视觉与力控技术完成复杂上下料;3)工业5G+IIoT毫秒级感知网络;4)数字孪生全息管控系统。关键技术包括基于Acto

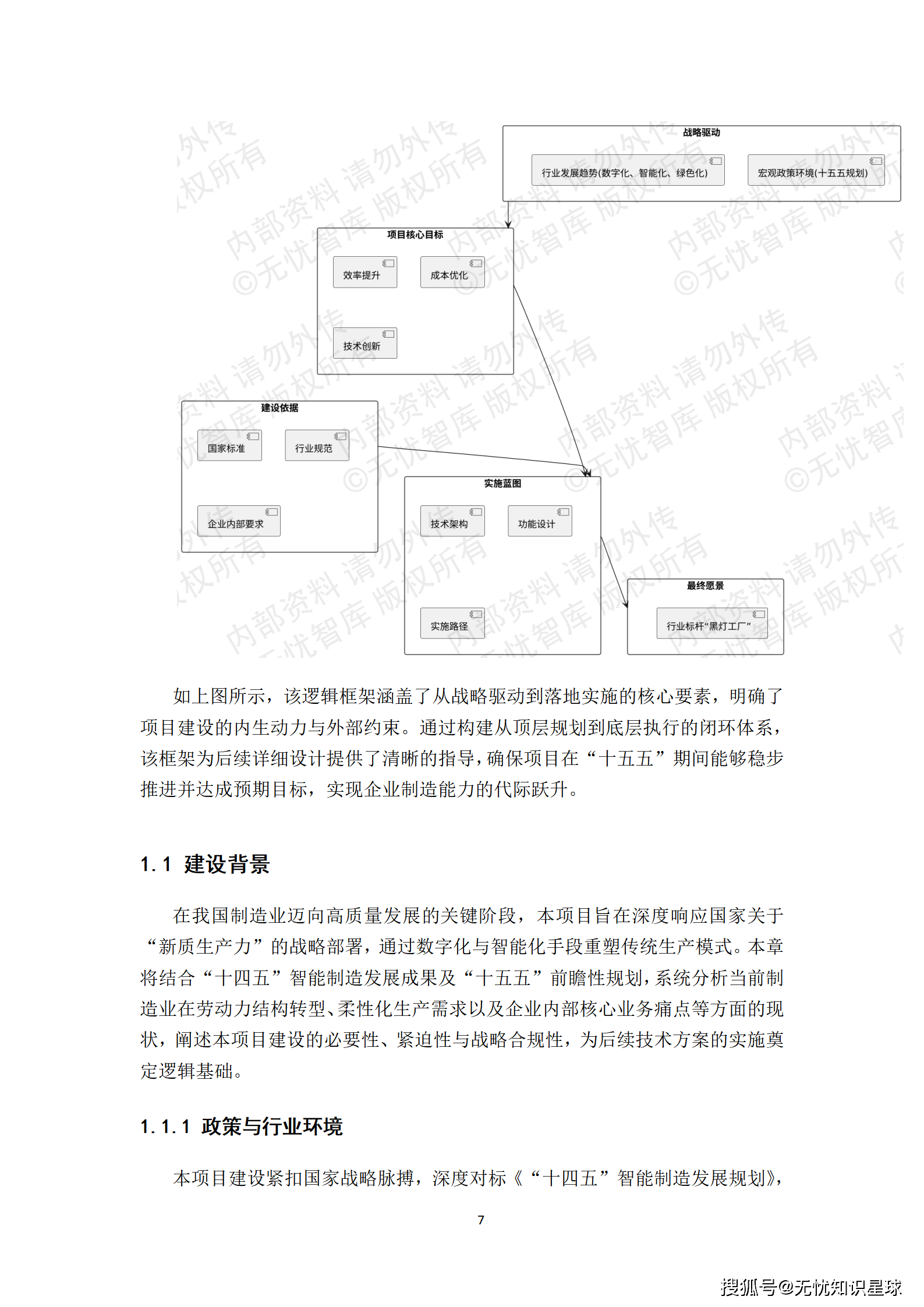
导读:在“十五五”即将来临之际,全球制造业正站在新一轮科技革命与产业变革的交汇点。面对劳动力结构逆转、市场需求碎片化以及传统自动化瓶颈的多重挑战,某大型工厂前瞻性提出了一套基于 多Agent协同调度与 人形机器人集群的“黑灯工厂”建设方案。本文将以CSDN爆文风格,深度拆解这份万字级建设方案,从宏观背景到微观技术实现,从算法架构到硬件选型,全方位揭示未来工厂的演进路径。这不仅是一份技术方案,更是中国制造业向“新质生产力”跃迁的实战蓝图。

一、时代洪流:为何“十五五”是智能制造的决胜窗口?
1.1 政策风口:从“自动化”到“自适应智能”的国家意志
“十四五”收官在即,“十五五”大幕将启。国家层面已明确将**“新质生产力”**作为推动高质量发展的核心引擎。在《“十四五”智能制造发展规划》及《关于推动未来产业创新发展的实施意见》中,“人工智能+制造业”的战略部署被提到了前所未有的高度。
根据**GB/T 39116-2020《智能制造能力成熟度模型》最高等级要求,国家正加速推动制造业从单纯的“自动化”向具备自感知、自学习、自决策能力的“自适应智能”**跨越。本项目正是紧扣这一战略脉搏,旨在通过引入多Agent调度算法与人形机器人等前沿技术,落实工业4.0深度融合与产业链自主可控的指导方针,力争在“十五五”期间打造国家级“灯塔工厂”标杆。
这不仅仅是一次技术改造,更是一场由传统制造向高端柔性智造的战略转型。对于大型工厂而言,这不仅是响应号召,更是生存之战。
1.2 行业痛点:传统工厂的“至暗时刻”
尽管许多企业已完成了初步的自动化改造,但在迈向高度智能化的过程中,依然面临着**“柔性不足”与“人力瓶颈”**的双重绞杀。
1.2.1 排程逻辑僵化:计划赶不上变化
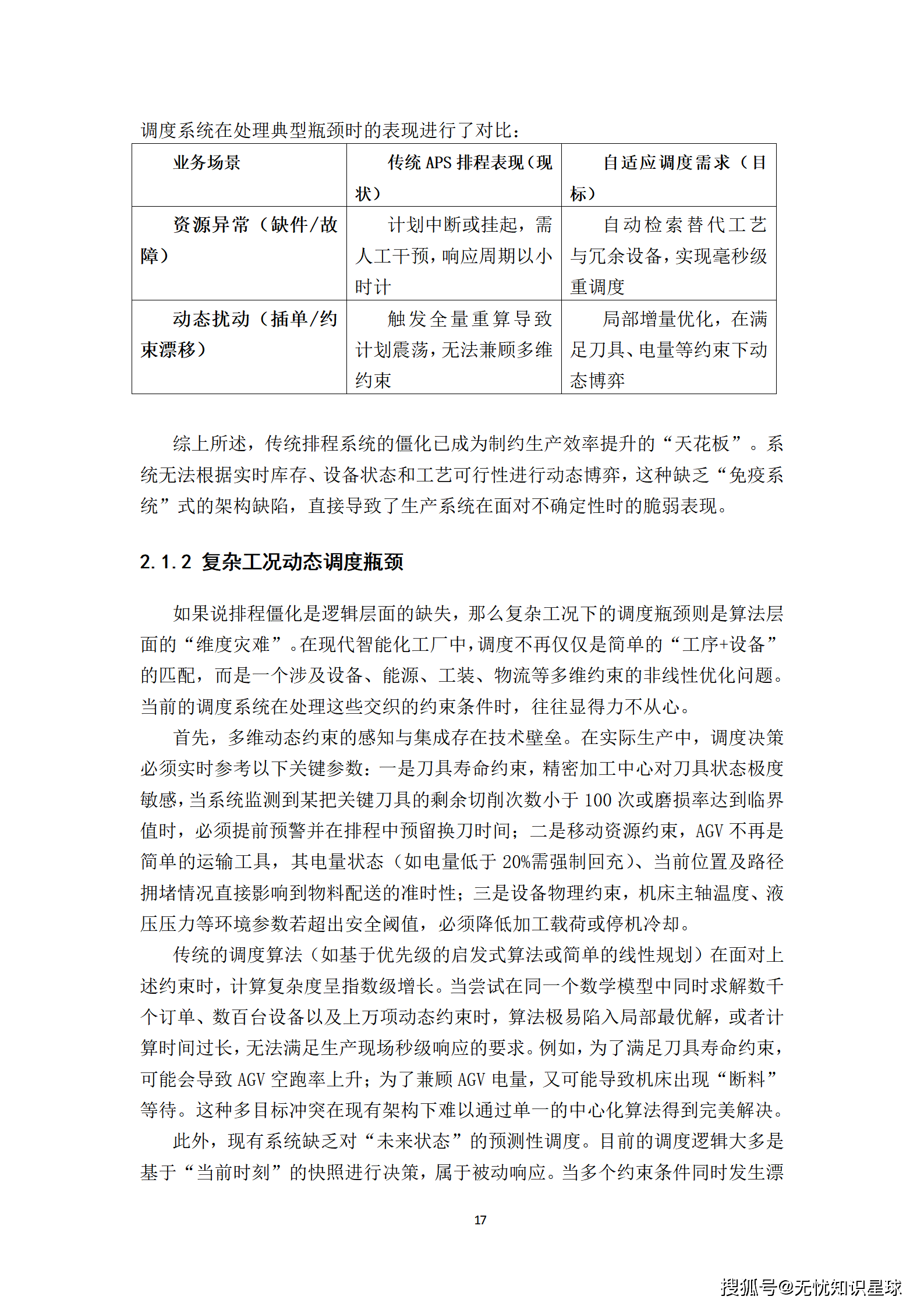
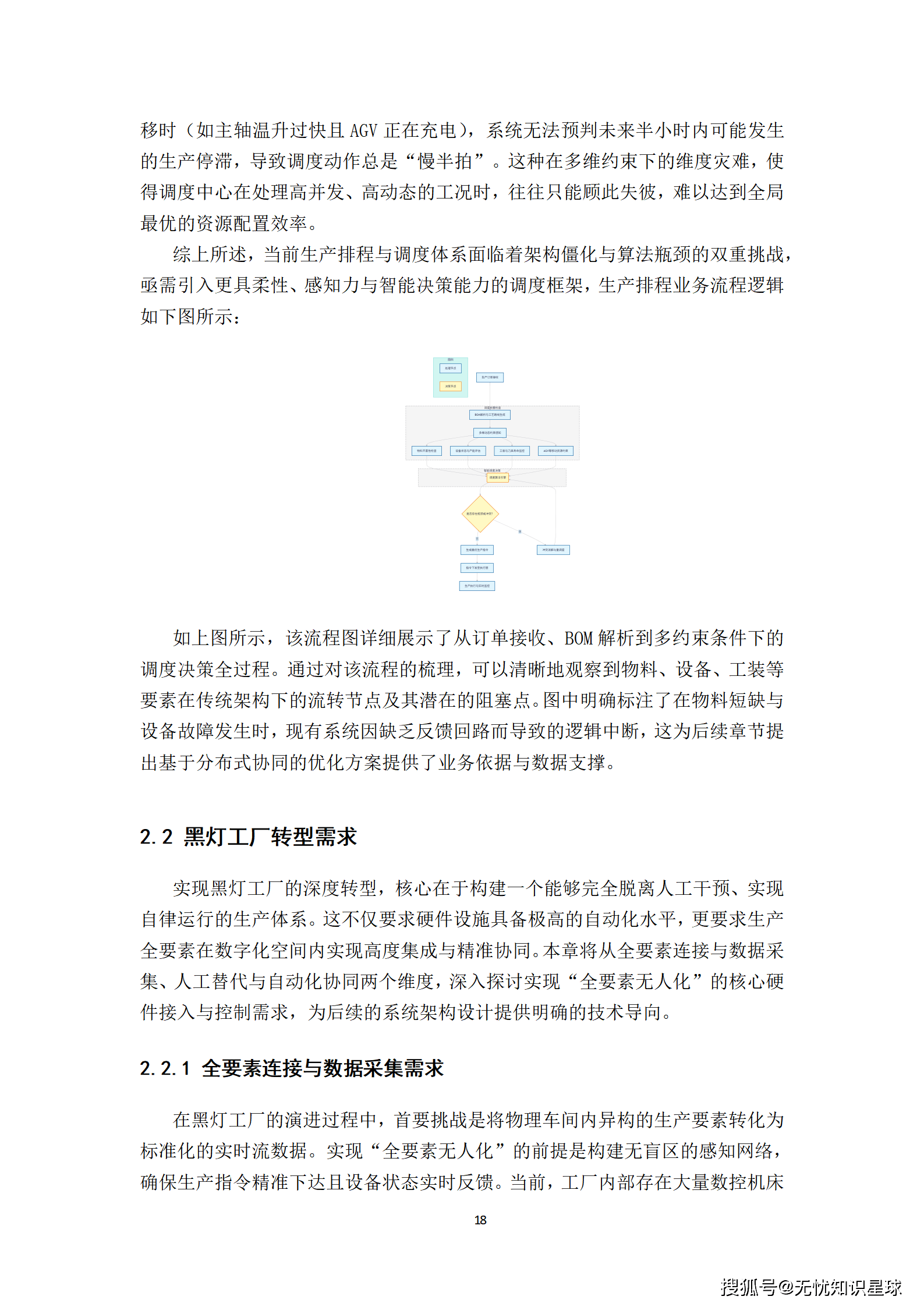
现有的ERP/MES系统多采用集中式APS(高级计划与排程)排程。这种模式在面对突发插单、设备宕机或物料短缺时,显得笨重而迟缓:
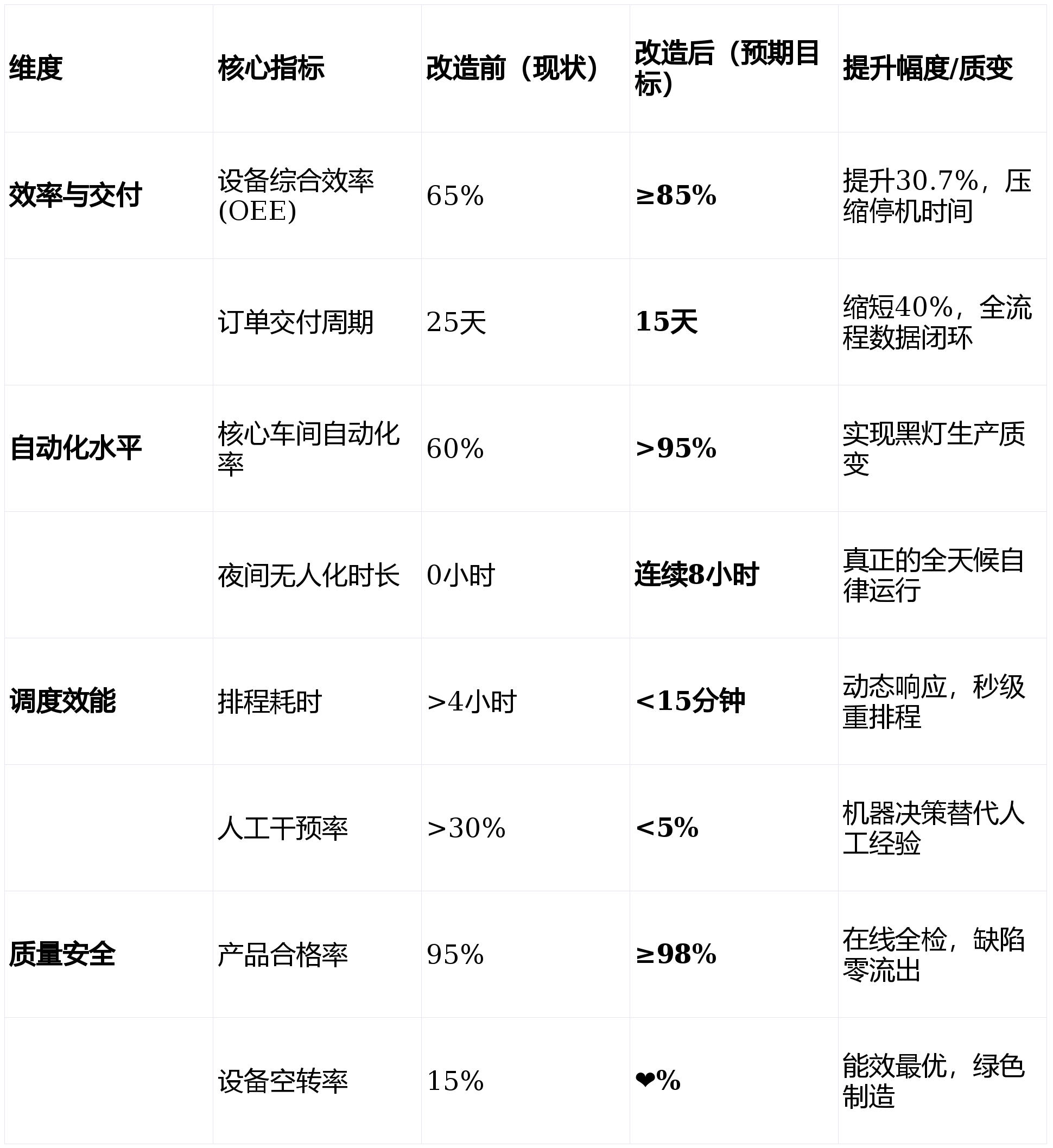
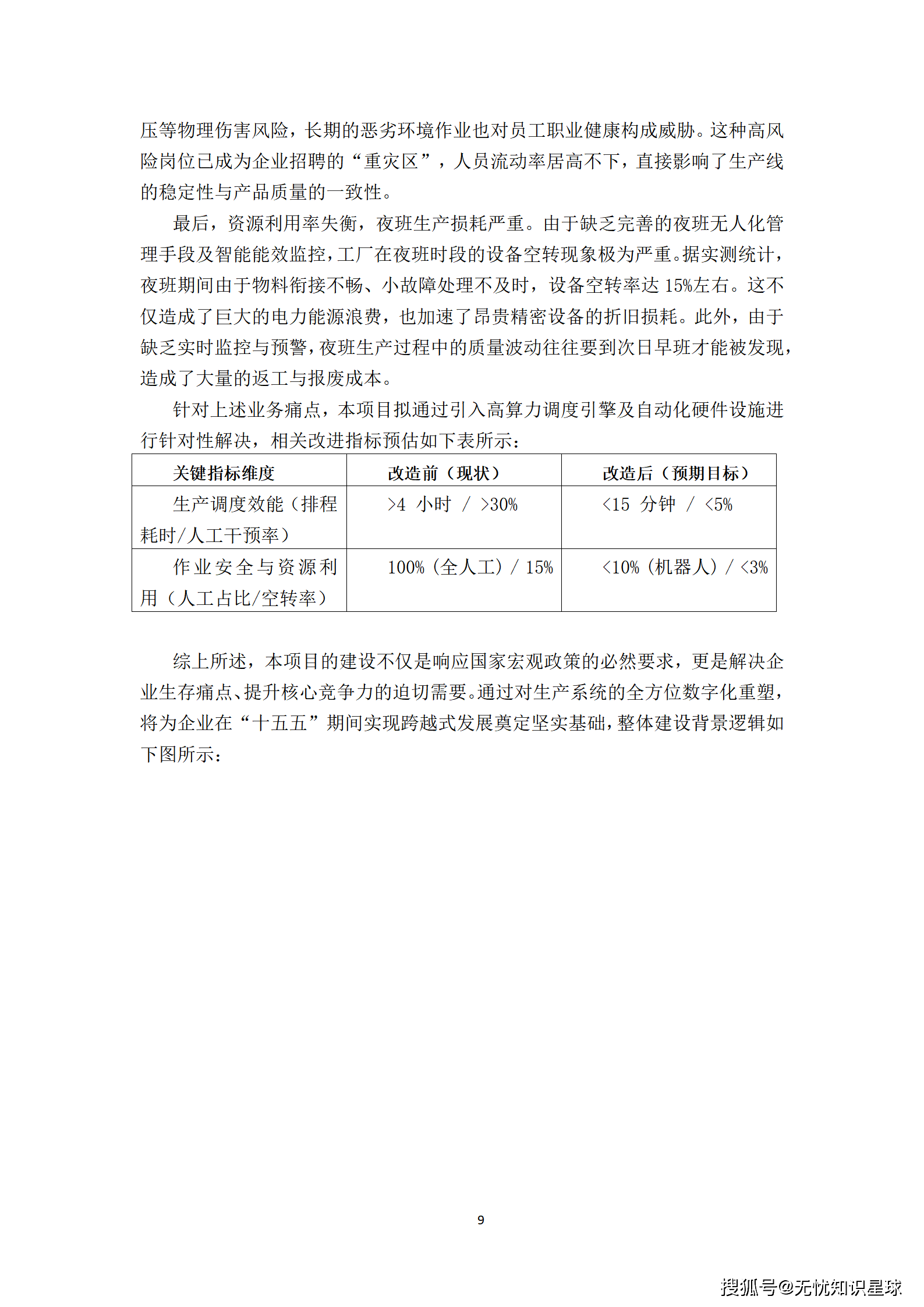
- 计算耗时巨大:单次全量排程耗时往往超过4小时。
- 人工干预率高:一旦计划失效,人工干预率高达30%以上。
- 缺乏适应性:难以应对小批量、多品种的柔性生产需求,导致生产现场频繁出现“计划赶不上变化”的窘境。
1.2.2 生产环境受限:高危岗位的无人化难题
在锻造、高温加工等核心环节,环境温度长期维持在45℃以上,伴随高分贝噪音与金属粉尘。
- 安全风险高:人工上下料存在极高的烫伤、机械挤压风险。
- 招工难留人难:年轻一代对恶劣环境作业的就业意愿持续走低,人员流动率居高不下,直接影响生产线稳定性。
1.2.3 资源利用率低:夜班生产的“黑洞”
由于缺乏真正的无人化作业能力,工厂夜班时段设备空转率高达15%。
- 能耗浪费:巨大的电力能源白白流失。
- 质量失控:缺乏实时监控,质量波动往往次日才能发现,造成大量返工与报废。
1.3 建设必要性:不转型即淘汰
本项目的建设已不再是“锦上添花”,而是企业生存与发展的必然选择。
- 合规红线:随着《安全生产法》深化落实,实现危险岗位“机械化换人、自动化减人”已成为监管红线。
- 市场倒逼:订单碎片化要求生产线具备极高的自适应能力,否则将因无法快速响应市场而流失核心客户。
- 技术代差:工业4.0已进入多Agent协同与具身智能时代。若不进行前瞻性布局,企业将在“十五五”期间陷入技术代差,丧失行业领先地位。
二、顶层设计:构建“十五五”智能制造新范式
2.1 总体建设目标:量化指标背后的野心
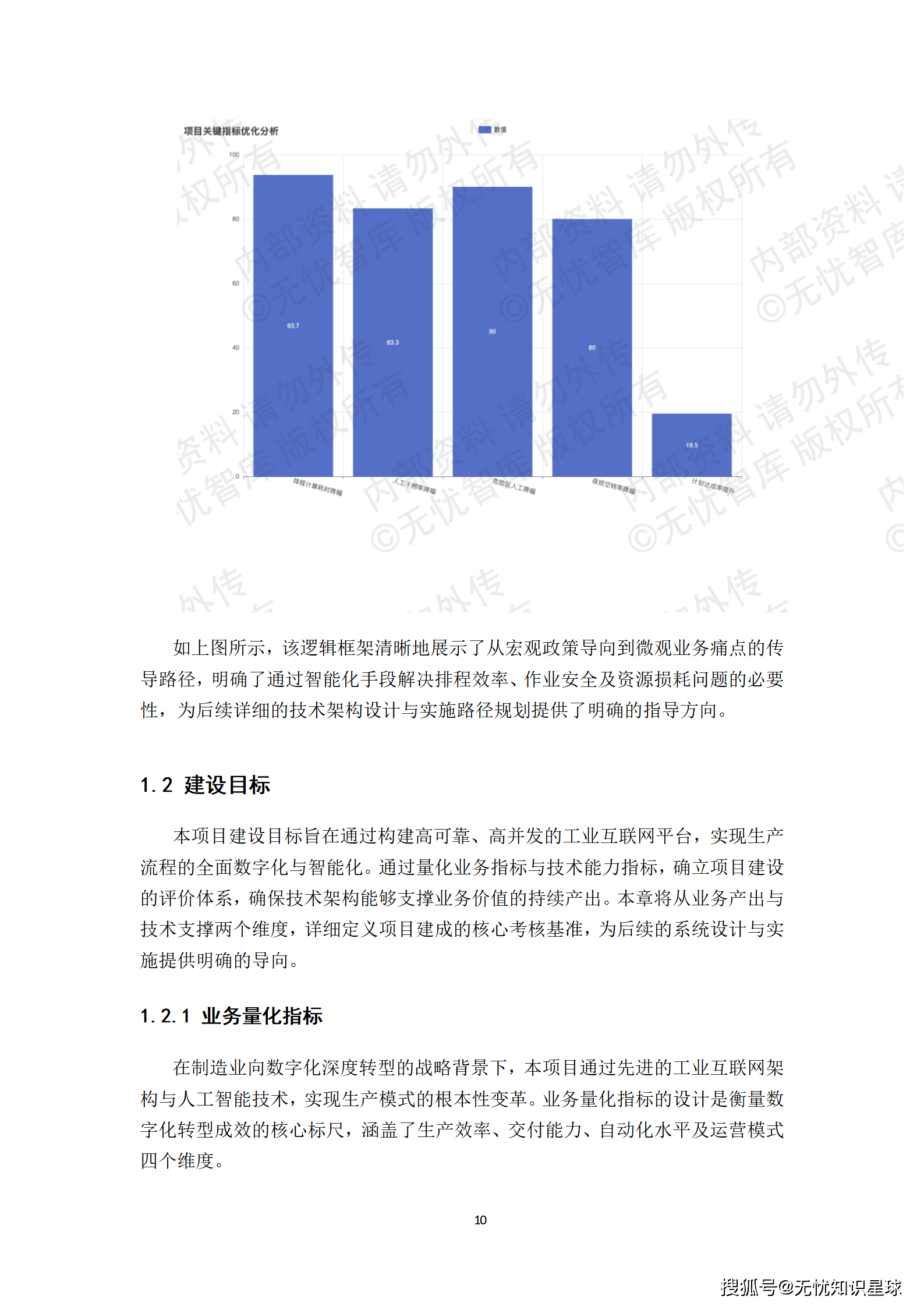
本项目设定了极具挑战性的量化目标,旨在通过数字化与智能化手段重塑传统生产模式。
2.2 核心建设内容:四大模块驱动转型
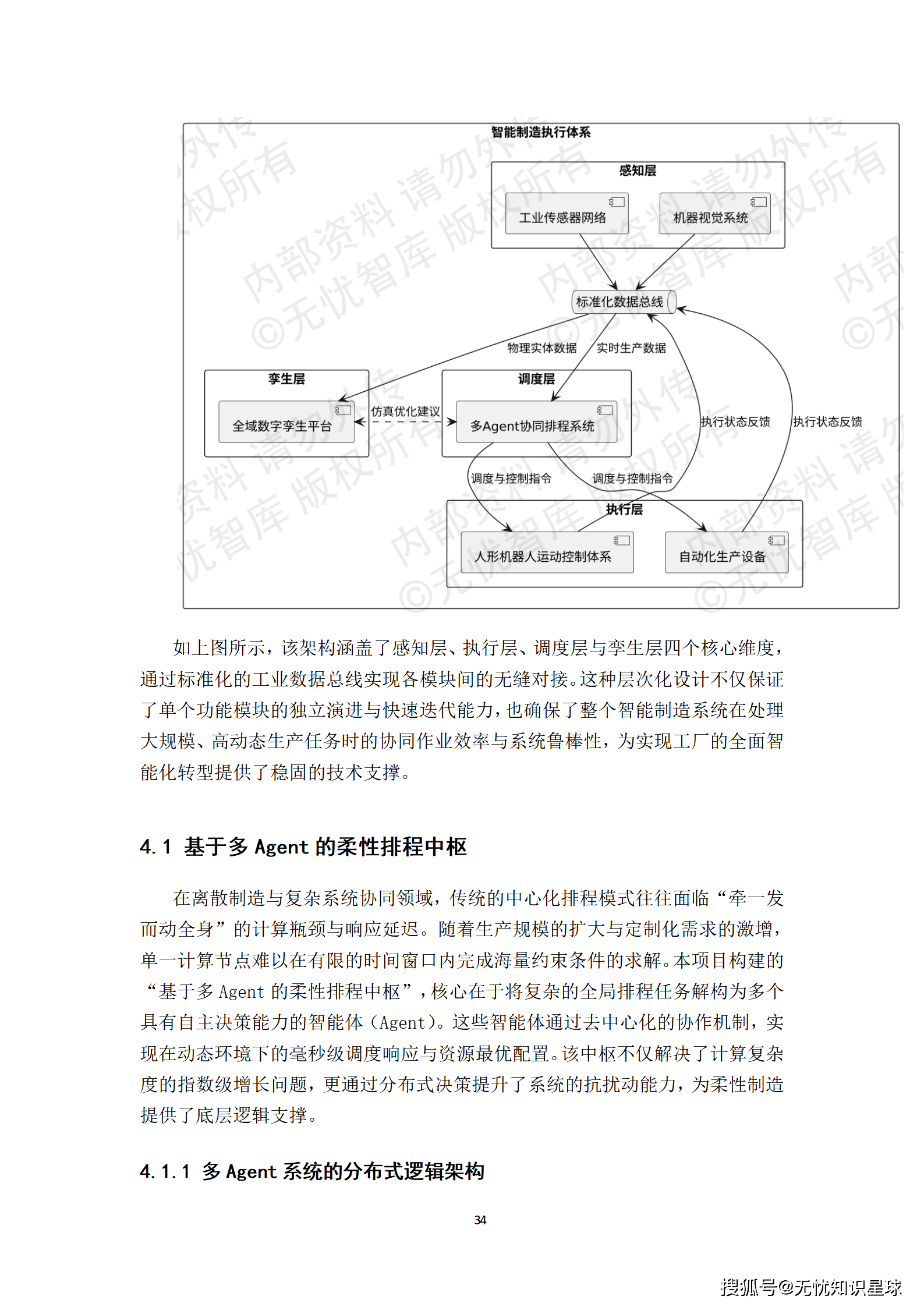
项目核心涵盖四大模块,构建了从大脑到肢体的完整智能体系:
- 基于多Agent的柔性排程中枢:
- 采用去中心化架构,将生产单元抽象为具有自主决策能力的智能体(Agent)。实现复杂工况下的自组织调度与秒级重排程,彻底解决传统集中式算法的“维度灾难”。
- 黑灯工厂无人化作业体系:
- 部署具备视觉伺服能力的人形机器人与AGV集群。利用3D视觉与力控技术,实现散乱毛坯件的精准抓取与精密上下料,填补传统机械臂在复杂工序中的灵活性空白。
- 工业5G+IIoT感知平台:
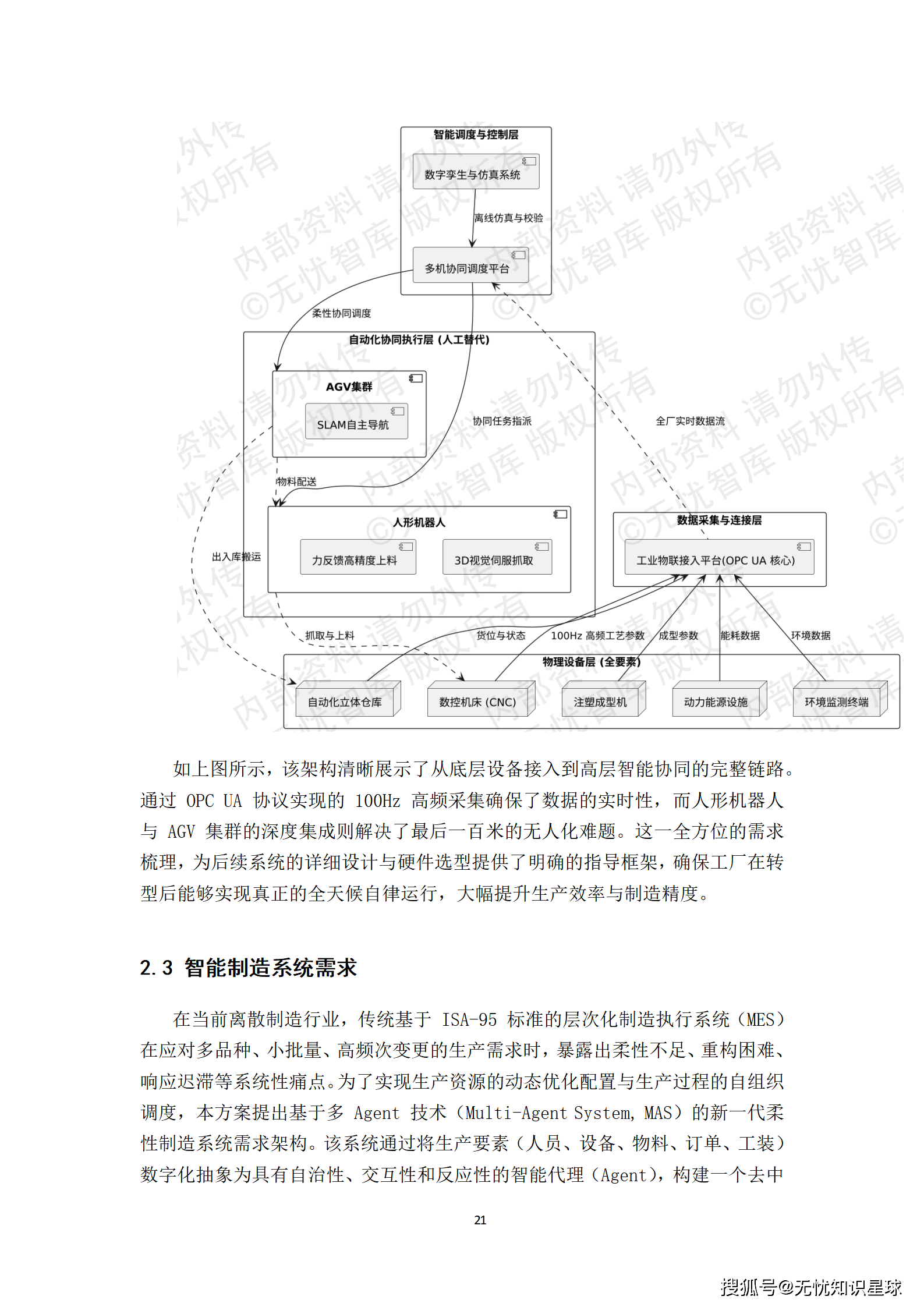
- 构建无盲区的感知网络,实现全要素数据的毫秒级采集(100Hz)与边缘侧实时控制。通过OPC UA协议统一异构设备接口,消除数据孤岛。
- 数字孪生全息管控系统:
- 构建物理车间与虚拟空间的实时映射(延迟<100ms)。支持生产过程的预测性维护、能耗自适应管理及“时光胶囊”故障追溯,实现从“经验驱动”向“数据驱动”的转型。
三、核心技术解密:多Agent柔性排程中枢
这是整个方案的“大脑”,也是解决传统排程僵化问题的关键所在。
3.1 为什么选择多Agent(MAS)?
传统集中式排程在面对数千个订单、数百台设备以及上万项动态约束(刀具寿命、AGV电量、主轴温度等)时,计算复杂度呈指数级增长,极易陷入局部最优或计算超时。
多Agent系统(Multi-Agent System, MAS)通过将全局任务解构为多个具有自治性、交互性和反应性的智能代理,实现了:
- 去中心化决策:决策权下放到最接近生产现场的单元,缩短决策链条。
- 分布式协同:通过群体智能涌现,实现全局相对最优。
- 高鲁棒性:局部故障不会导致全局瘫痪,系统具备自愈能力。
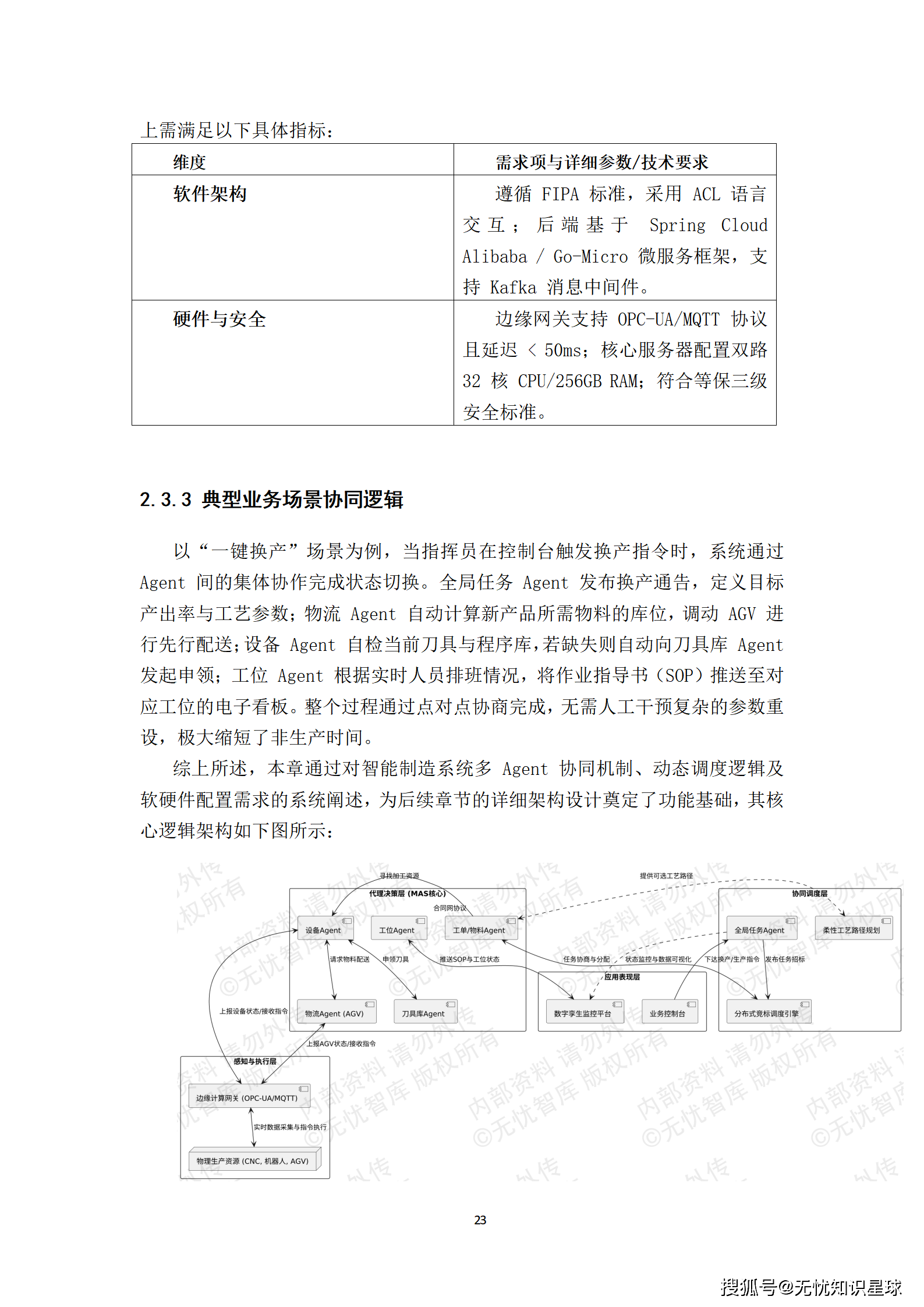
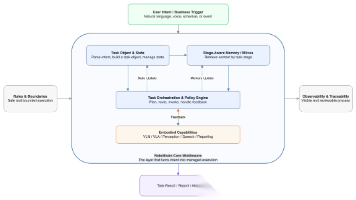
3.2 分布式逻辑架构:四大智能体角色
系统由四类核心Agent组成,通过消息传递实现群体智能:
- 任务Agent(Task Agent):
- 角色:代表每一个待处理的业务订单或生产工单。
- 持有信息:工艺路线、交付期限、质量标准、优先级。
- 核心逻辑:“寻找最优执行者”。主动发起招标,在资源池中筛选最匹配的加工单元。
- 资源Agent(Resource Agent):
- 角色:代表生产设备、人力工位或计算节点。
- 持有信息:实时负荷、维护周期、加工精度、刀具寿命、能耗状态。
- 核心逻辑:“最大化资源价值”。根据自身状态参与竞标,返回预期完成时间与成本。
- 物料Agent(Material Agent):
- 角色:负责供应链的实时匹配。
- 核心逻辑:确保任务执行时的物料齐套性。若缺料,自动触发补货或切换替代BOM,避免排程失效。
- 协调Agent(Coordinator Agent):
- 角色:系统的“仲裁者”。
- 核心逻辑:监控全局冲突,维护黑板系统(Blackboard System),处理Agent间的逻辑僵局,防止死锁。
3.3 核心算法:改进的合同网协议(CNP)
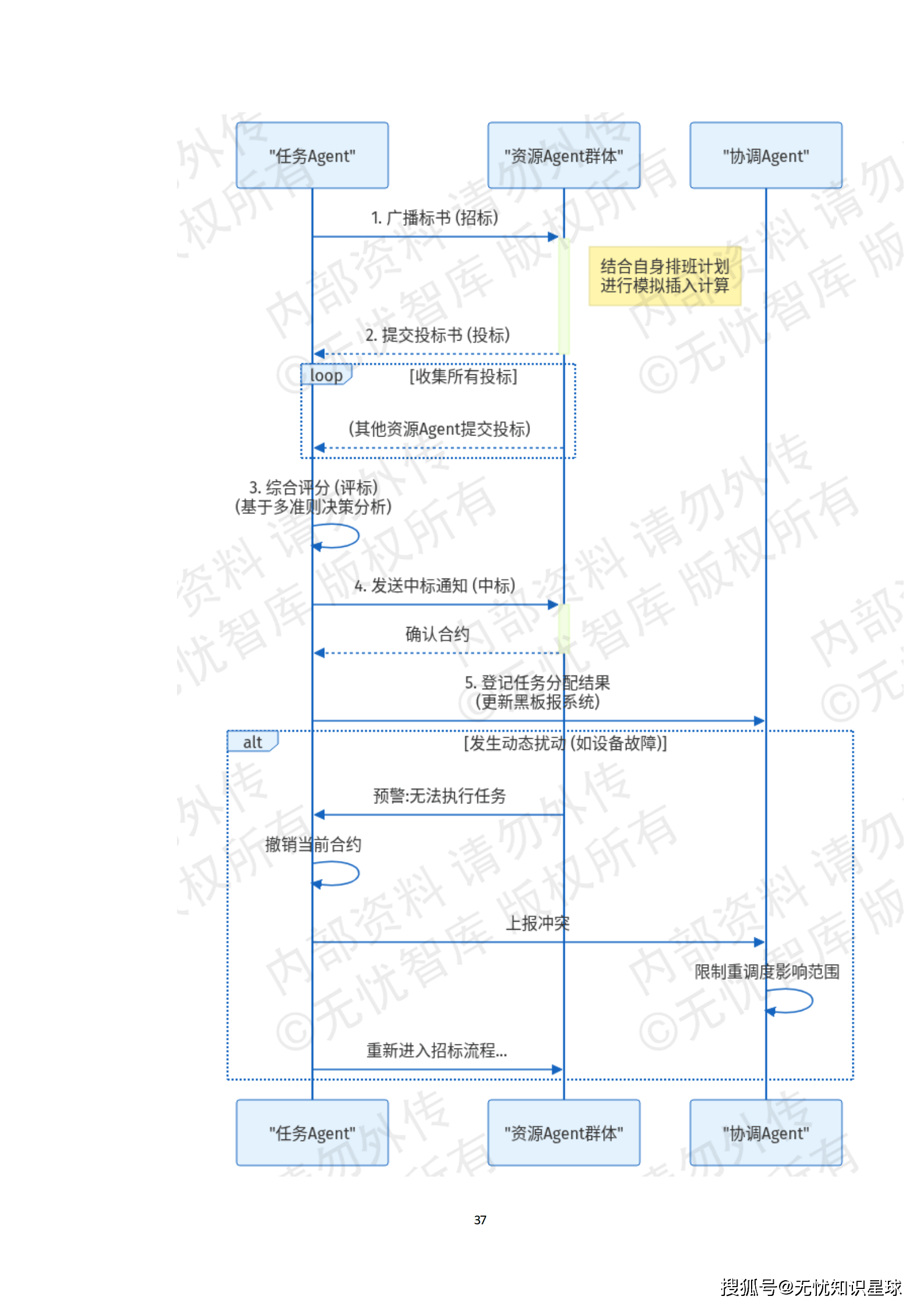
引擎内部基于**改进的合同网协议(Contract Net Protocol, CNP)**实现资源分配,模拟市场经济中的招标过程:
- 招标阶段:任务Agent向潜在的资源Agent群体广播标书(包含加工参数、时间窗口、优先级)。
- 投标阶段:资源Agent接收标书后,结合自身排班计划进行模拟插入计算。若满足条件,返回投标书(包含预期完成时间、成本、可靠性指标)。此处采用启发式搜索算法,在局部解空间内快速寻找可行方案。
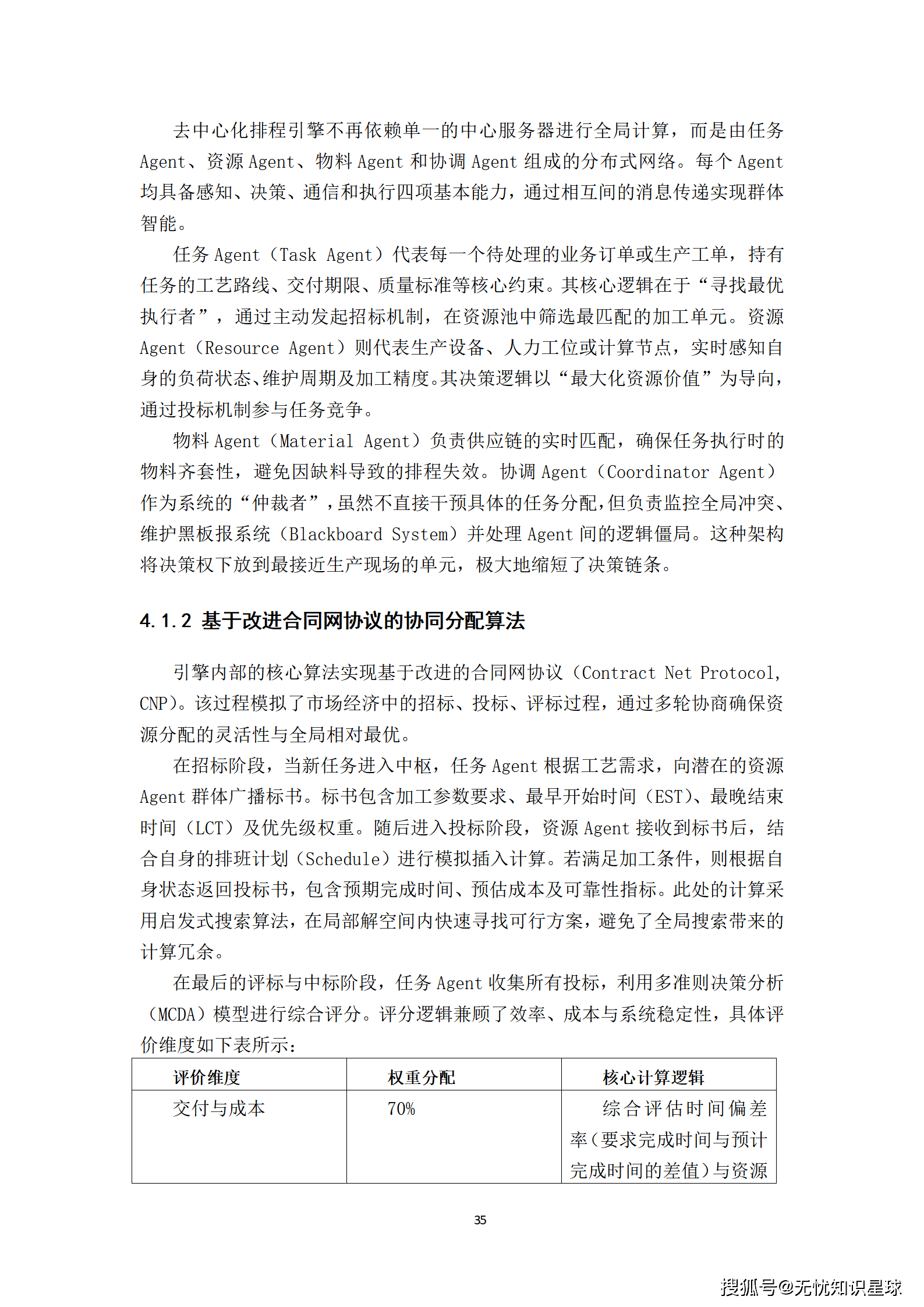
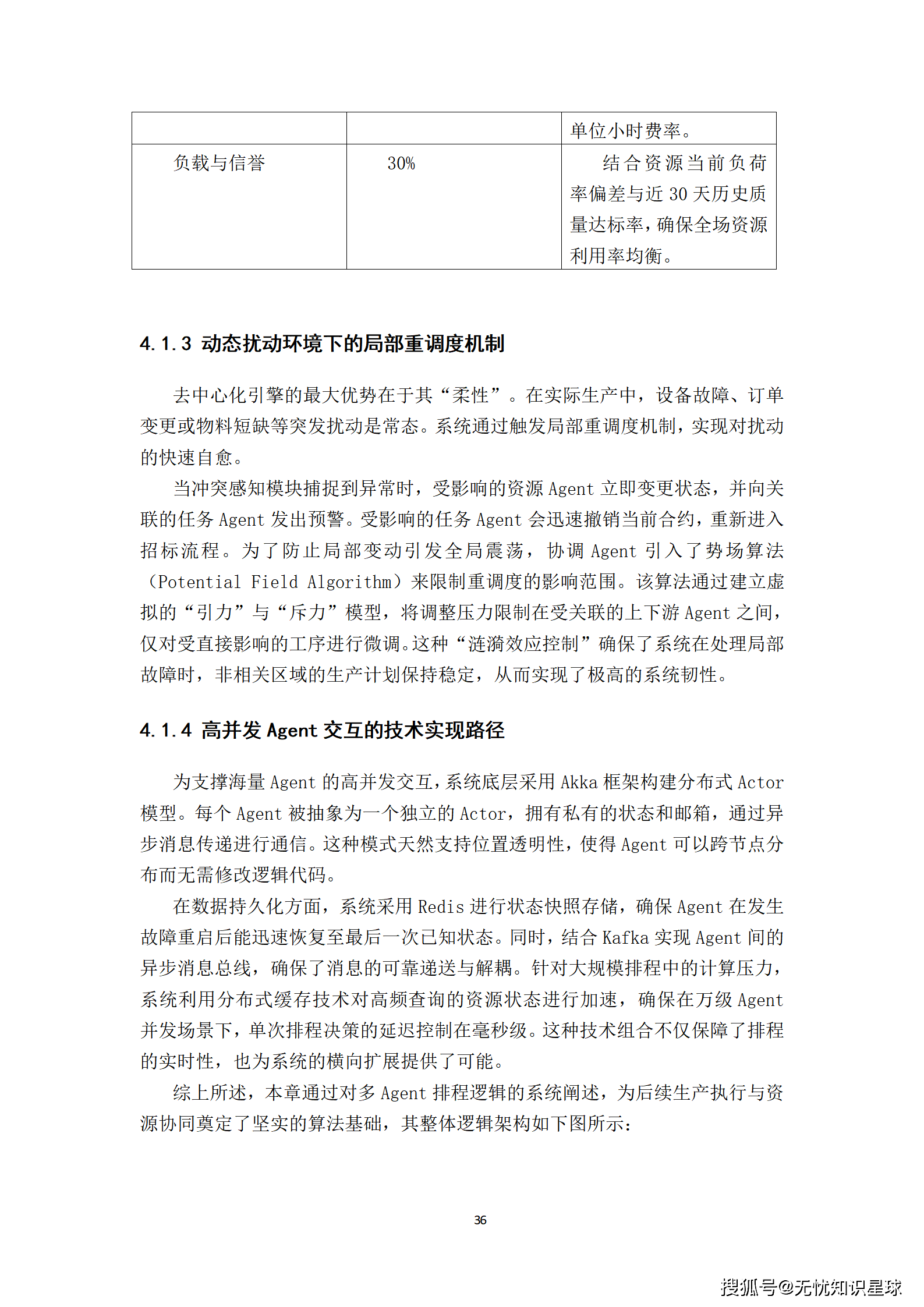
- 评标与中标:任务Agent利用**多准则决策分析(MCDA)**模型进行综合评分。交付与成本(70%权重):评估时间偏差率与资源费率。负载与信誉(30%权重):结合当前负荷率与历史质量达标率,确保全场资源均衡。
3.4 动态扰动下的局部重调度机制
这是体现“柔性”的关键。当发生设备故障或紧急插单时:
- 冲突感知:受影响的资源Agent立即变更状态并预警。
- 局部重招标:受影响的任务Agent撤销当前合约,重新发起招标。
- 涟漪效应控制:协调Agent引入势场算法(Potential Field Algorithm),建立虚拟的“引力”与“斥力”模型,将调整压力限制在受关联的上下游Agent之间。
- 结果:仅对受影响工序进行微调,非相关区域计划保持稳定,实现毫秒级自愈,避免全局震荡。
3.5 技术实现:高并发Actor模型
为支撑海量Agent的高并发交互,底层采用Akka框架构建分布式Actor模型:
- 异步消息传递:每个Agent作为独立Actor,拥有私有状态和邮箱,通过异步消息通信,天然支持位置透明性。
- 状态快照:利用Redis进行状态快照存储,确保故障重启后迅速恢复。
- 消息总线:结合Kafka实现可靠递送与解耦,确保万级Agent并发场景下,单次排程决策延迟控制在毫秒级。
四、黑灯工厂实战:人形机器人与异构设备协同
这是方案的“肢体”,解决了最后一百米的无人化难题。
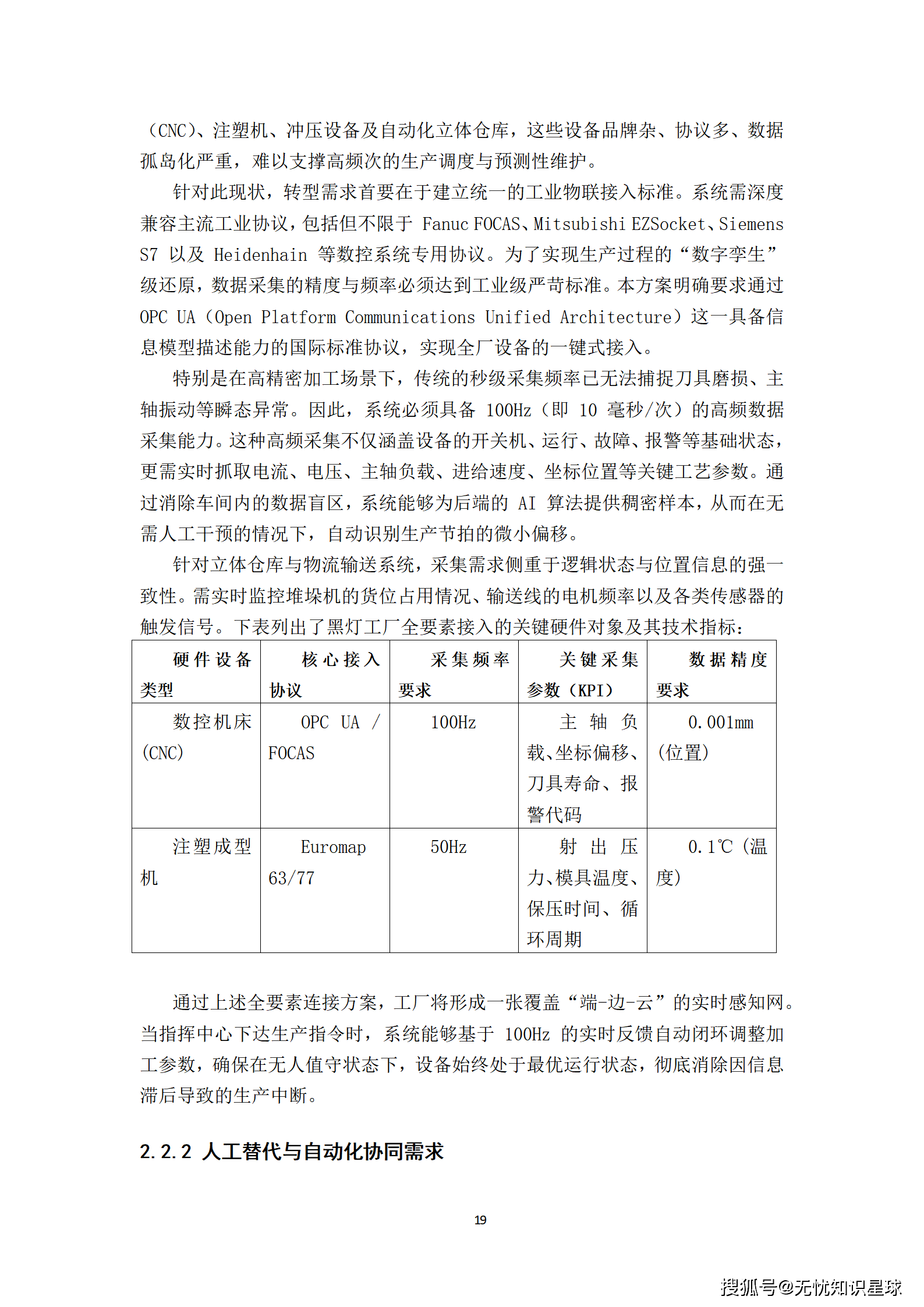
4.1 全要素连接:100Hz高频数据采集
实现“全要素无人化”的前提是构建无盲区的感知网络。
- 统一接入标准:深度兼容Fanuc FOCAS、Siemens S7等专用协议,并通过OPC UA实现一键式接入。
- 高频采集:针对高精密加工,采集频率提升至100Hz(10ms/次)。实时抓取主轴负载、坐标偏移、刀具寿命等关键参数,捕捉瞬态异常。
- 数据精度:位置精度达0.001mm,温度精度达0.1℃,为AI算法提供稠密样本。
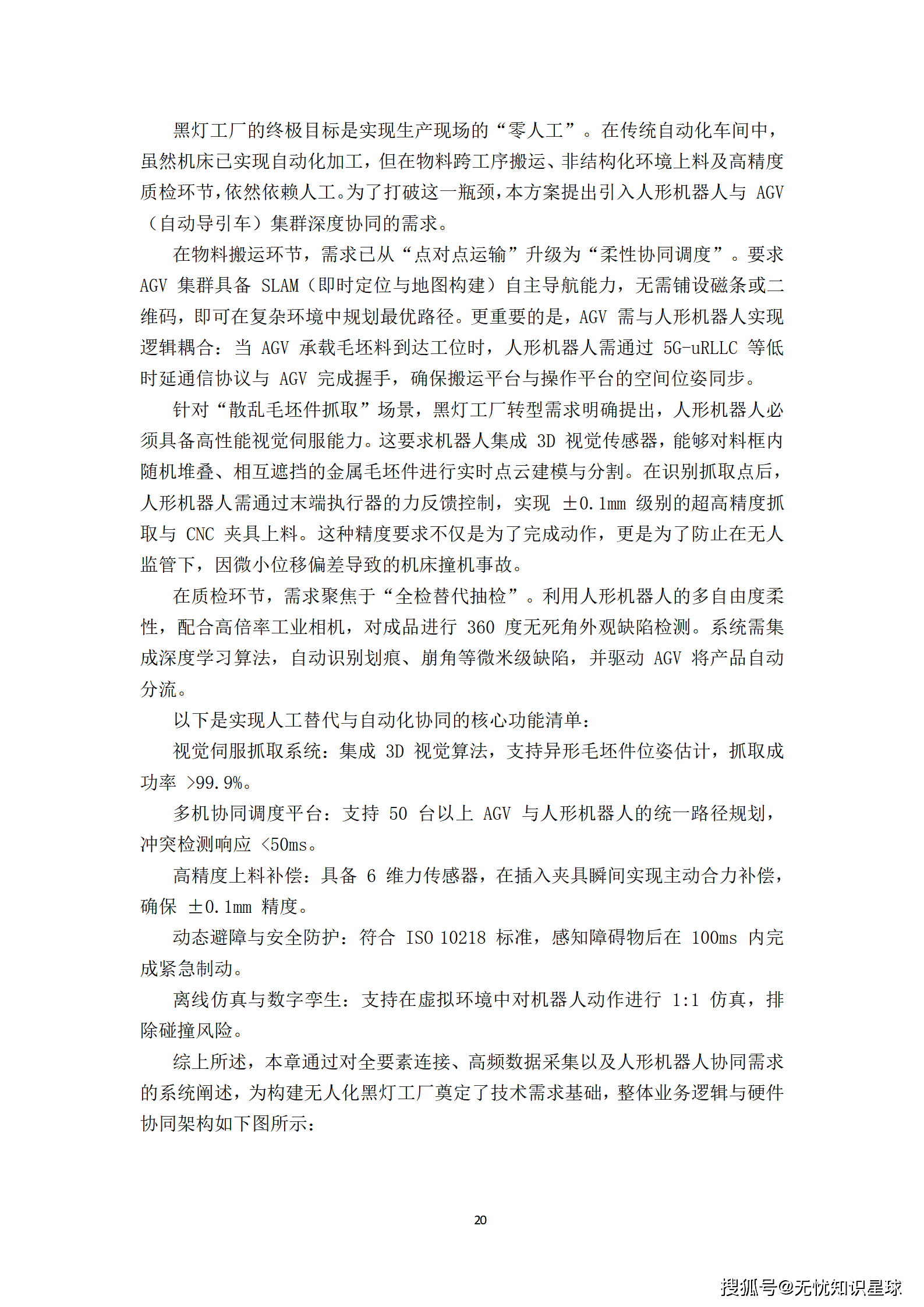
4.2 人形机器人:具身智能的终极形态
传统机械臂在应对散乱毛坯件抓取、非结构化环境上料时显得力不从心。本项目引入人形机器人,具备以下核心能力:
4.2.1 视觉伺服抓取系统
- 3D视觉建模:集成3D视觉传感器,对料框内随机堆叠、相互遮挡的金属毛坯件进行实时点云建模与分割。
- 高精度抓取:通过末端执行器的力反馈控制,实现±0.1mm级别的超高精度抓取与CNC夹具上料,防止撞机。
- 成功率:抓取成功率>99.9%。
4.2.2 多机协同调度
- 动态握手:AGV承载毛坯料到达工位时,人形机器人通过5G-uRLLC低时延通信与AGV完成握手,确保空间位姿同步。
- 路径规划:支持50台以上AGV与人形机器人的统一路径规划,冲突检测响应**<50ms**。
- 动态避障:符合ISO 10218标准,感知障碍物后在100ms内完成紧急制动。
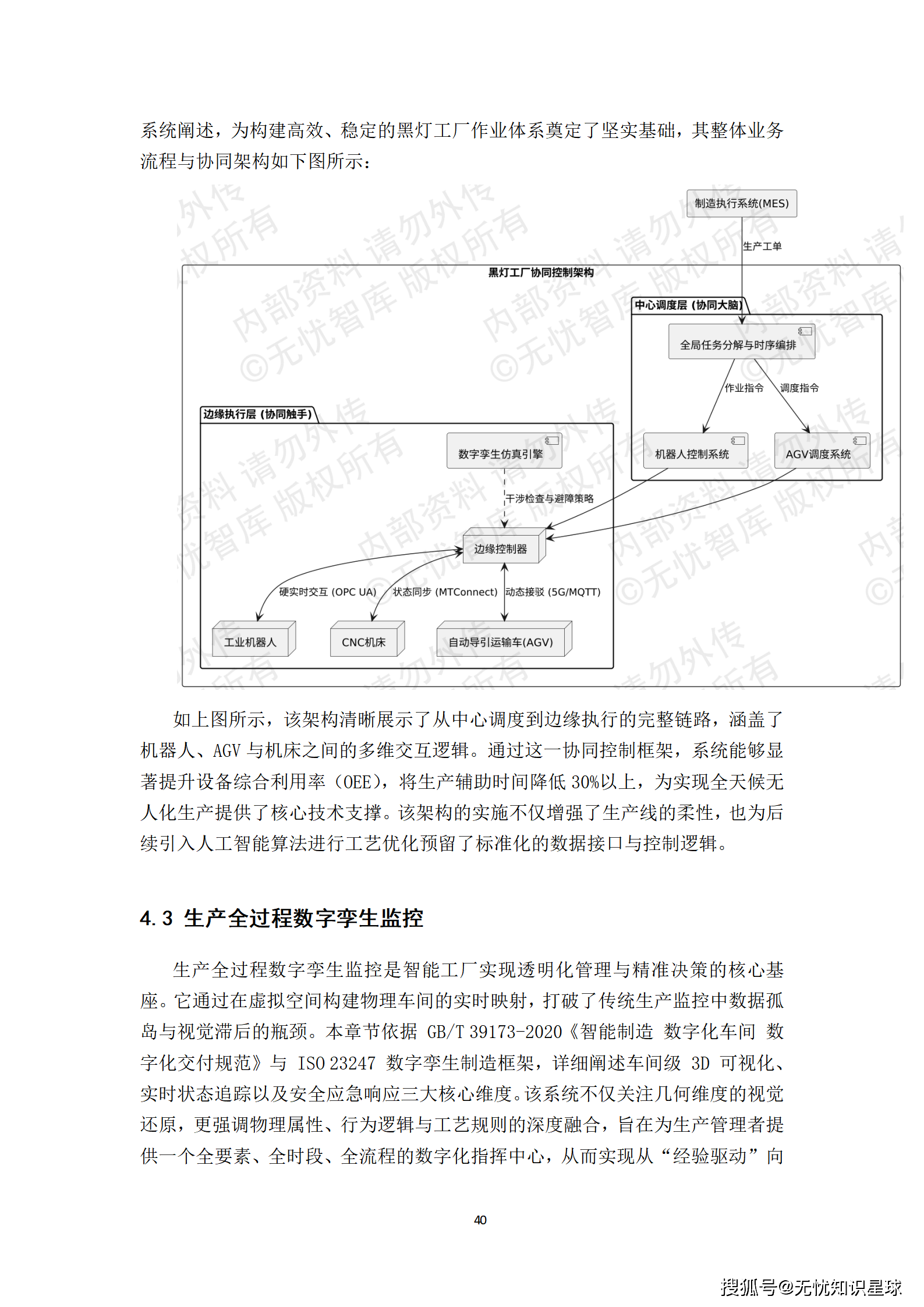
4.3 异构设备协同:中心调度+边缘执行
针对机器人、AGV、CNC等多品牌设备共存现状,采用分层协同架构:
- 中心调度层:作为“协同大脑”,负责全局任务分解与时序编排。
- 边缘执行层:通过TSN(时间敏感网络)或EtherCAT实现硬实时交互。例如,机床加工完成信号发出后,边缘控制器在毫秒级内触发机器人抓取。
- 设备抽象层(DAL):将复杂底层协议封装为统一业务原语,屏蔽硬件差异,支持OPC UA/VDA 5050等标准。
4.4 异常处理与自愈机制
在无人值守环境下,系统设计了三级异常响应:
- 感知级自愈:AGV路径受阻,自动重规划路径。
- 逻辑级保护:机器人抓取失败,自动重试并隔离不良品,通知AGV运送新毛坯。
- 系统级熔断:重大安全冲突时,执行“受控停机”并云端预警。
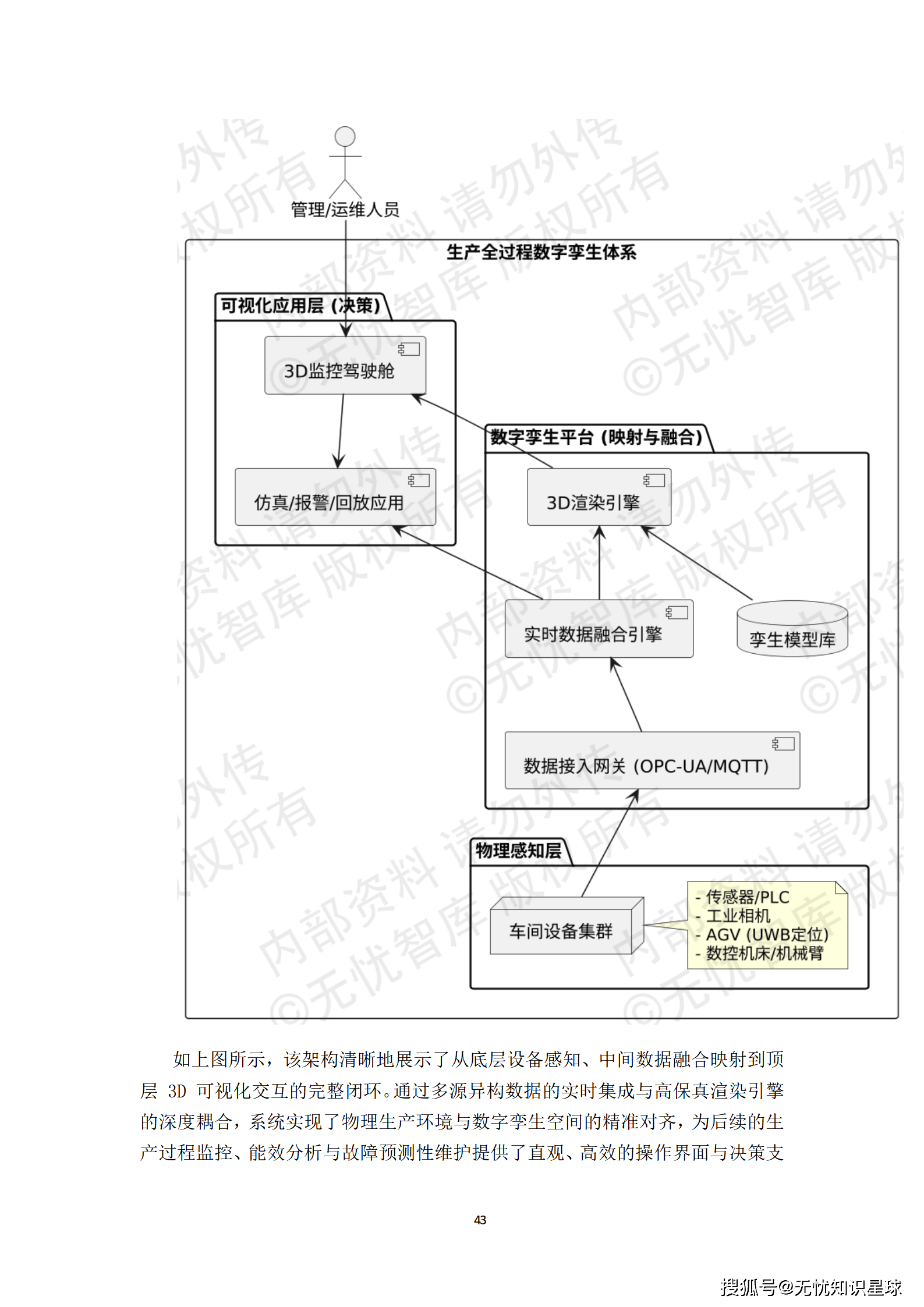
五、数字孪生与自适应管理:工厂的“镜像世界”
5.1 车间级高保真3D建模
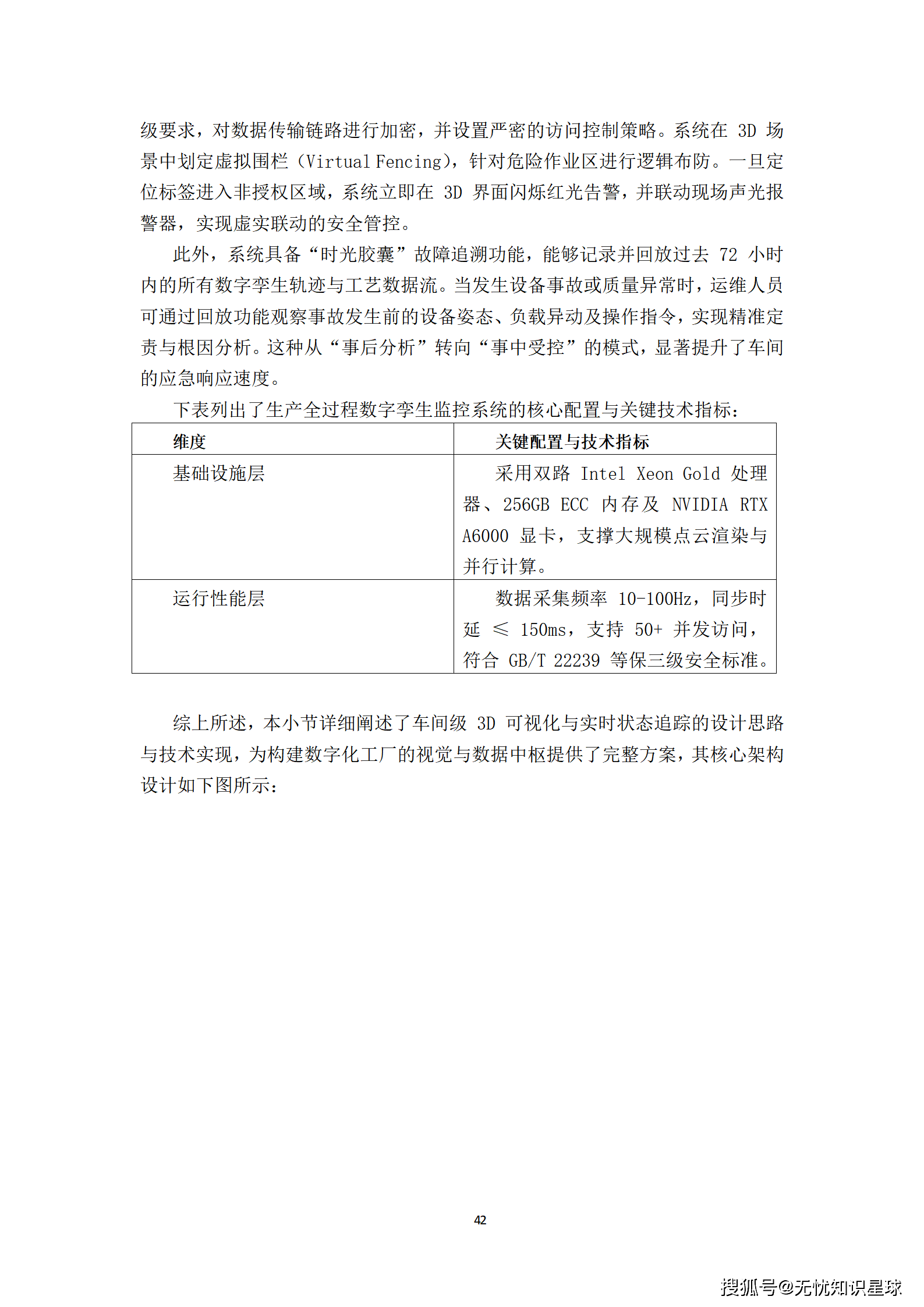
- 分级建模策略(LOD 100-500):建筑结构采用轻量化静态建模,核心设备建立高精度动态参数模型。
- 实时映射:利用Unreal Engine 5或Unity 3D,将物理设备的实时位姿、工艺参数与3D模型绑定,端到端延迟**<100ms**。
- 多维视角:支持“上帝视角”全场概览、“第一人称”虚拟巡检及“设备聚焦”单机细节。
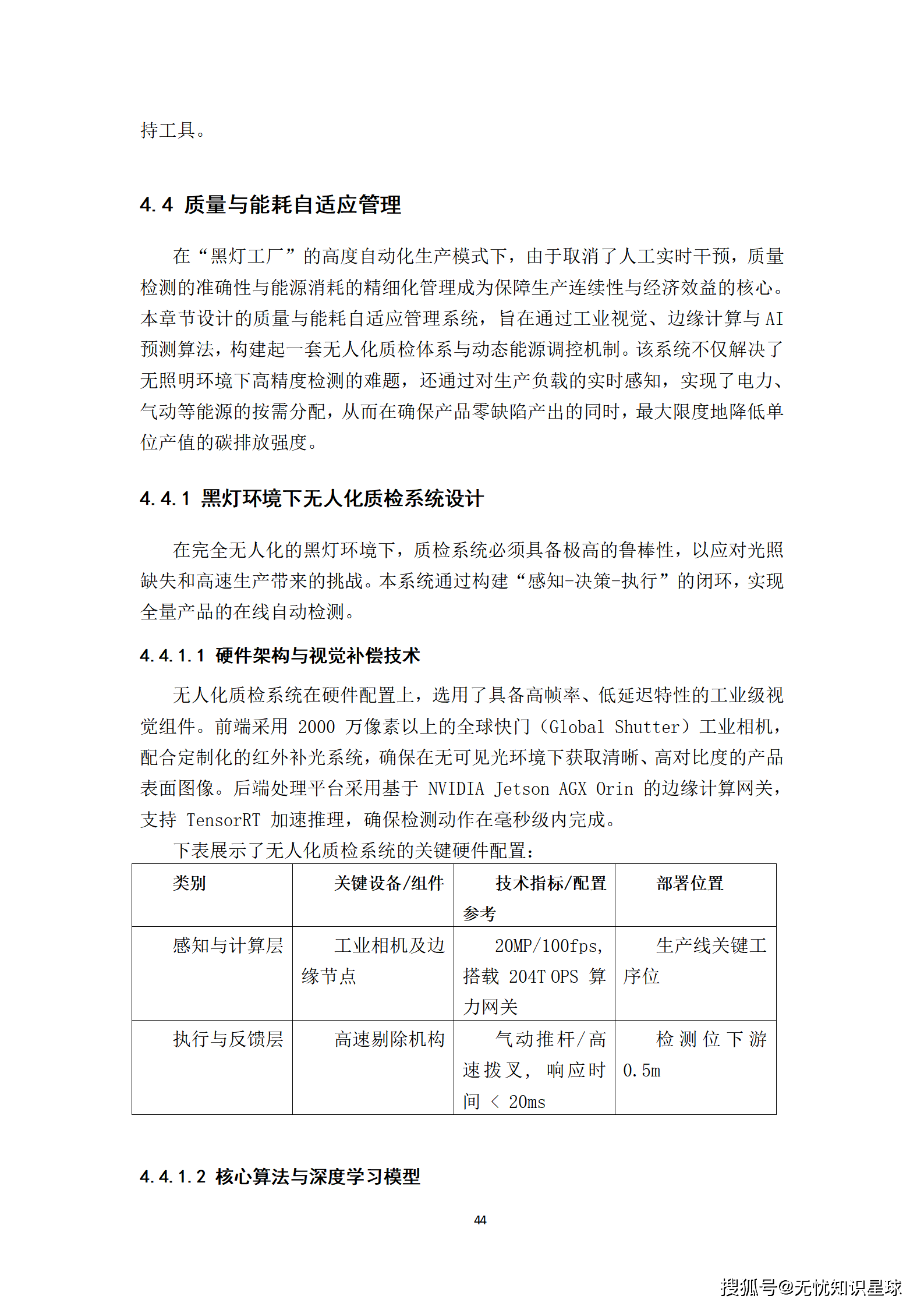
5.2 黑灯环境下的无人化质检
- 硬件配置:2000万像素全球快门工业相机 + 红外补光 + NVIDIA Jetson AGX Orin边缘计算网关。
- 双重校验算法:传统视觉(OpenCV)测尺寸 + 深度学习(YOLOv8/Transformer)检缺陷。
- 闭环管控:检测到不合格品,<20ms内触发剔除机构。连续3个次品自动触发“生产自锁”并告警。
- 指标:综合检出率(TAR)≥99.9%,误报率(FAR)≤0.05%。
5.3 能源动态调控与自适应优化
- 多级调控策略:照明自适应:无任务时自动切断非必要照明。设备待机:工序间隙超阈值,自动下发“深度待机”指令。环境温控:根据无人员散热特点,动态调节空调风机,预计降低暖通能耗15%。
- AI预测与削峰填谷:利用LSTM预测用电负荷,结合分时电价(TOU),在低谷期安排满负荷生产,高峰期限制非紧急功率。
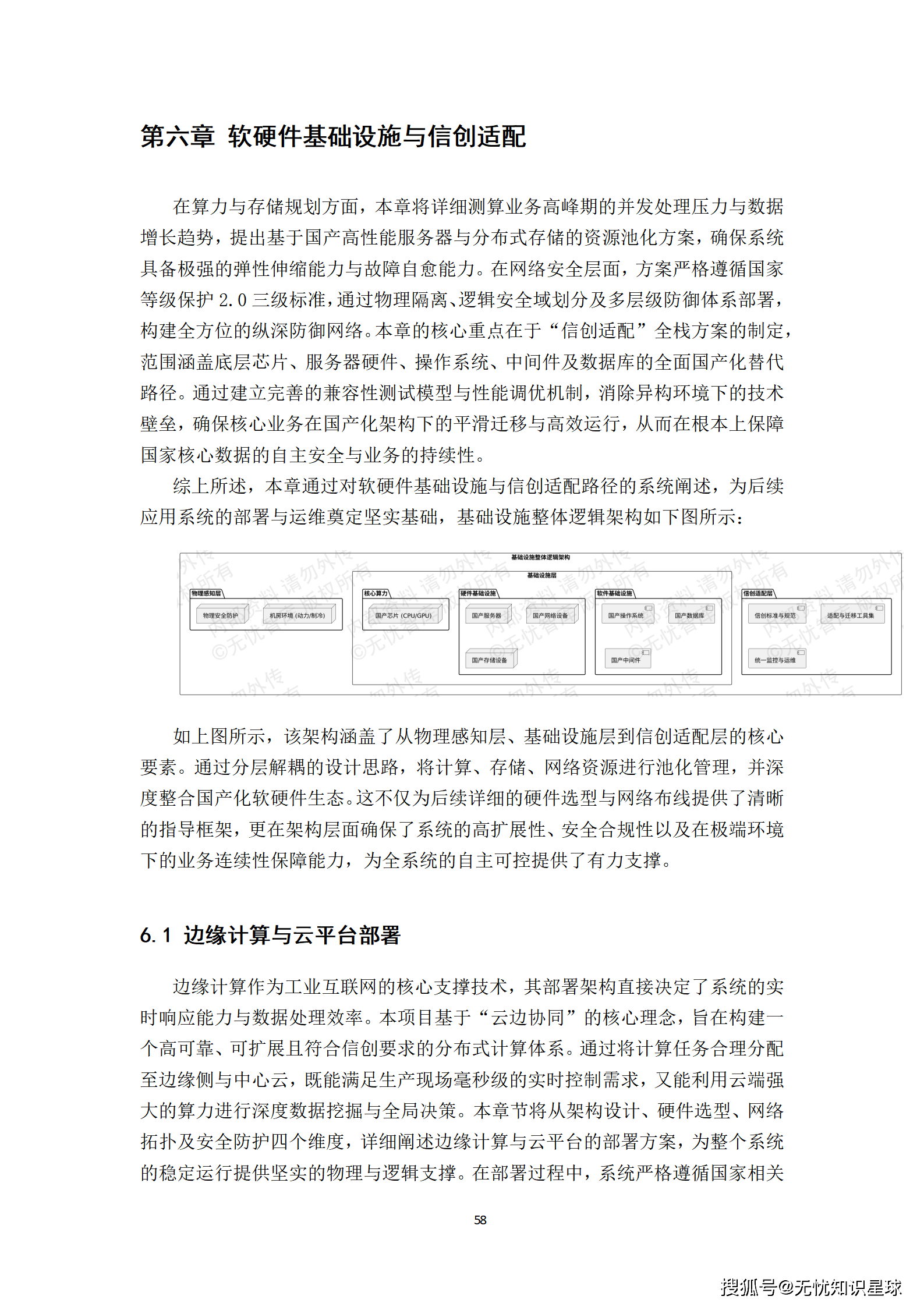
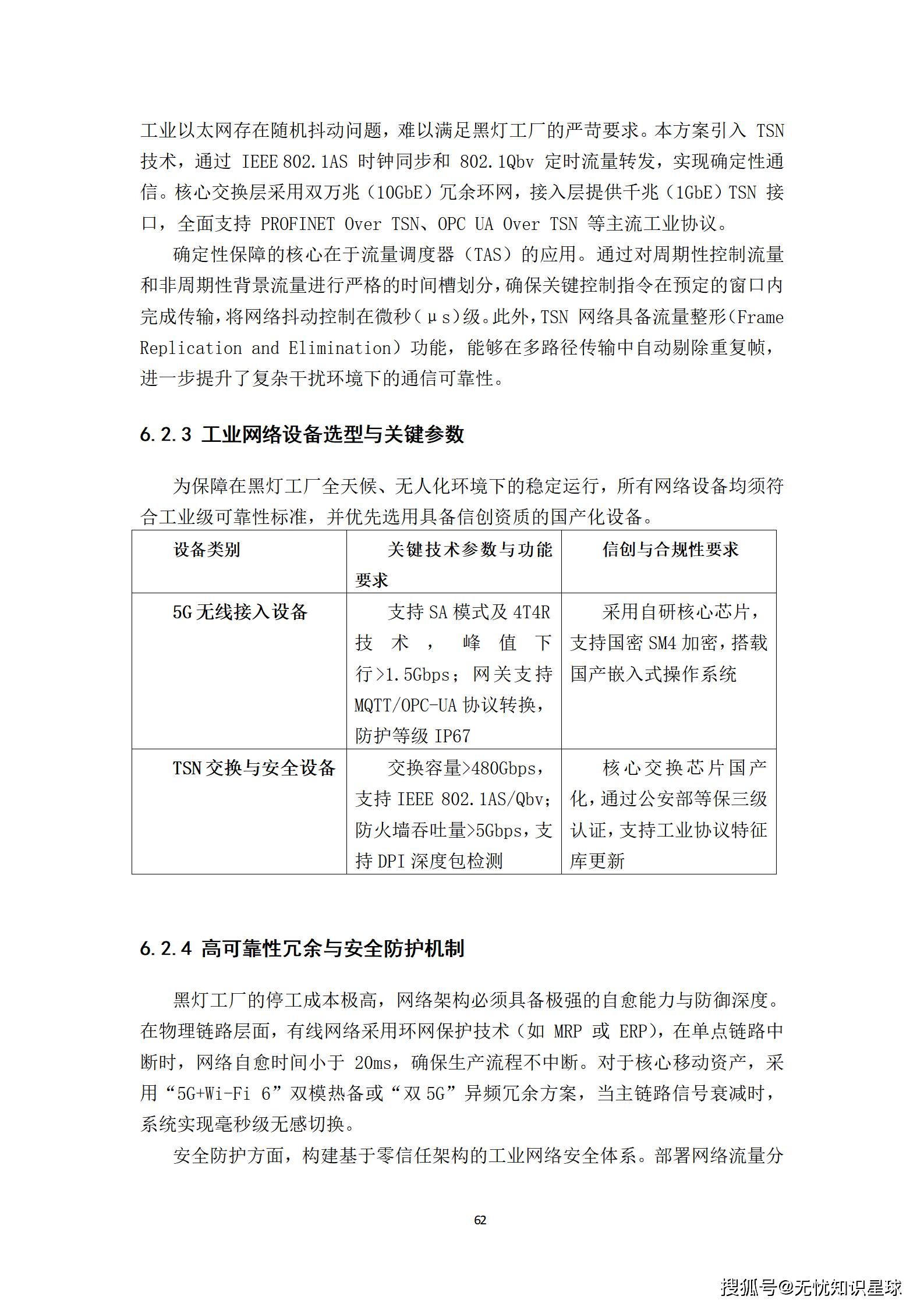
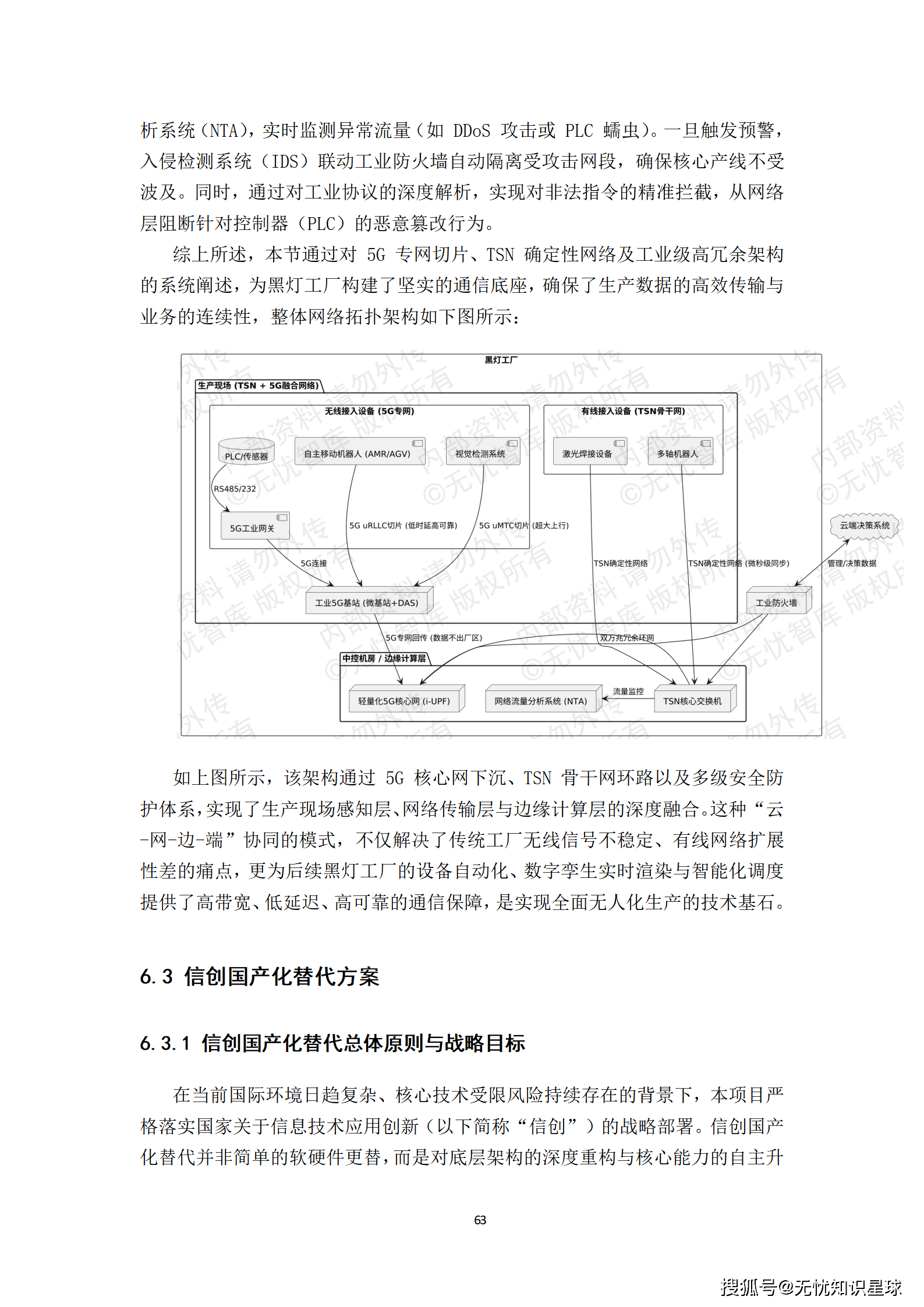
六、数据底座与信创适配:自主可控的坚实基石
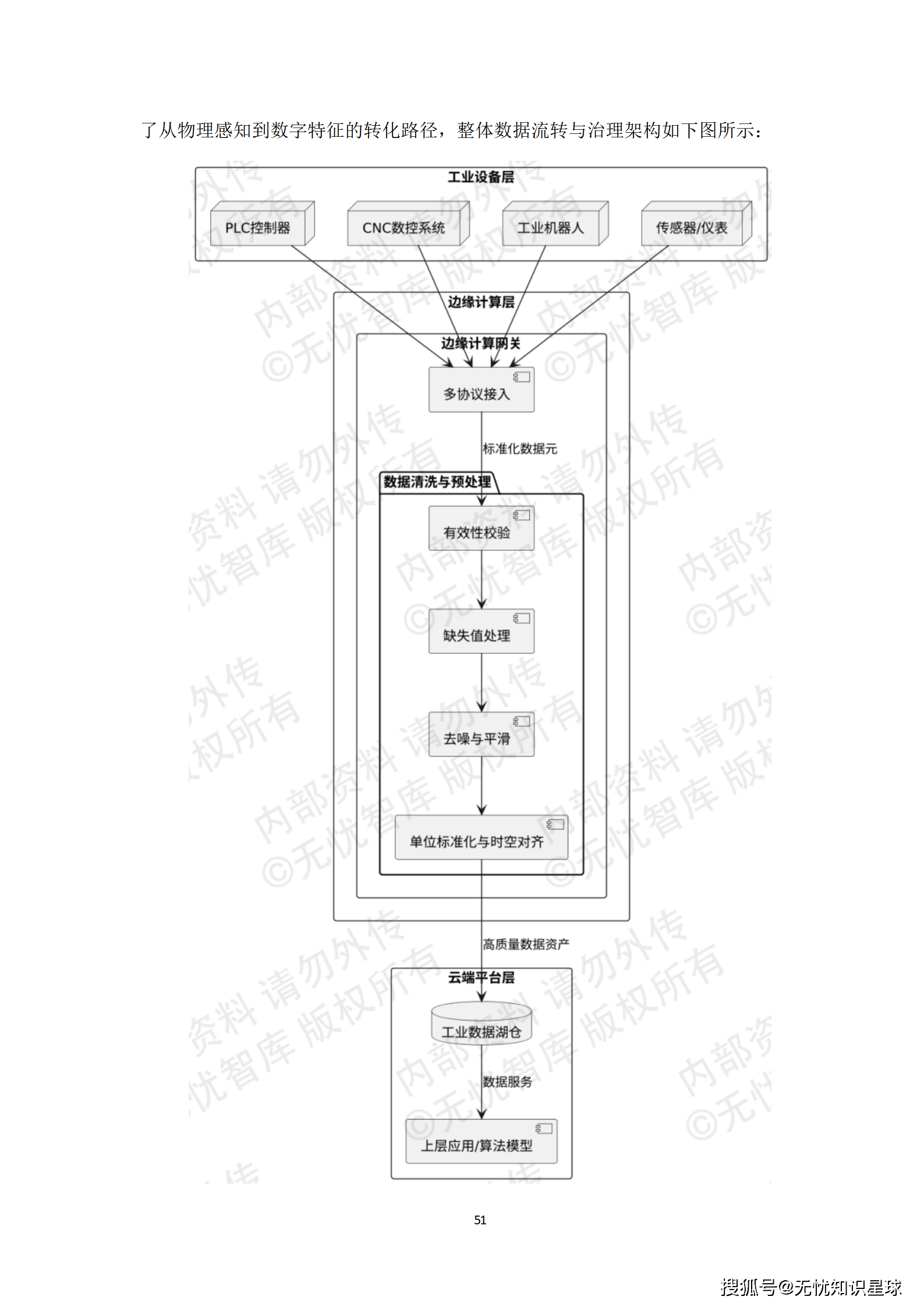
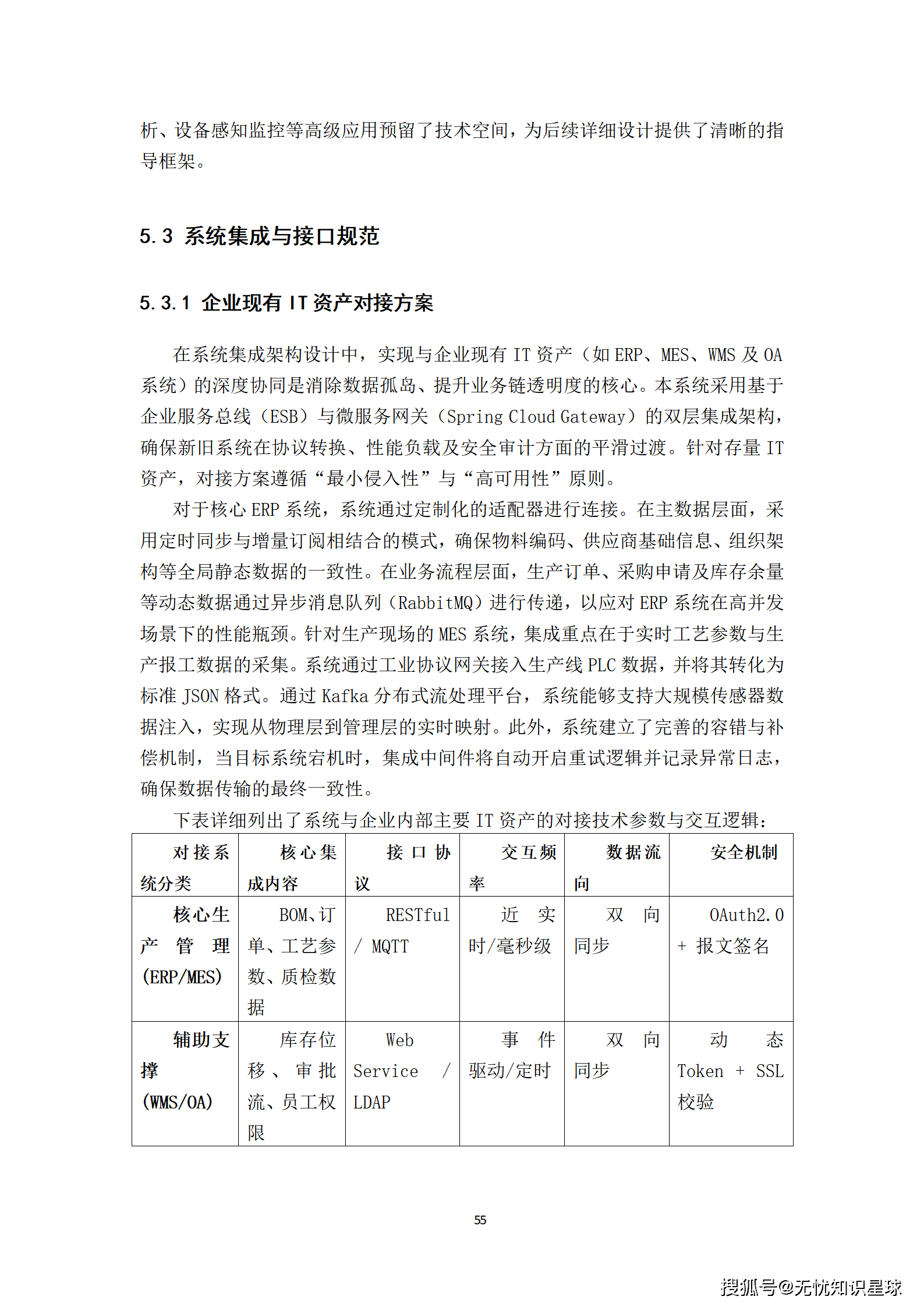
6.1 工业数据采集与治理
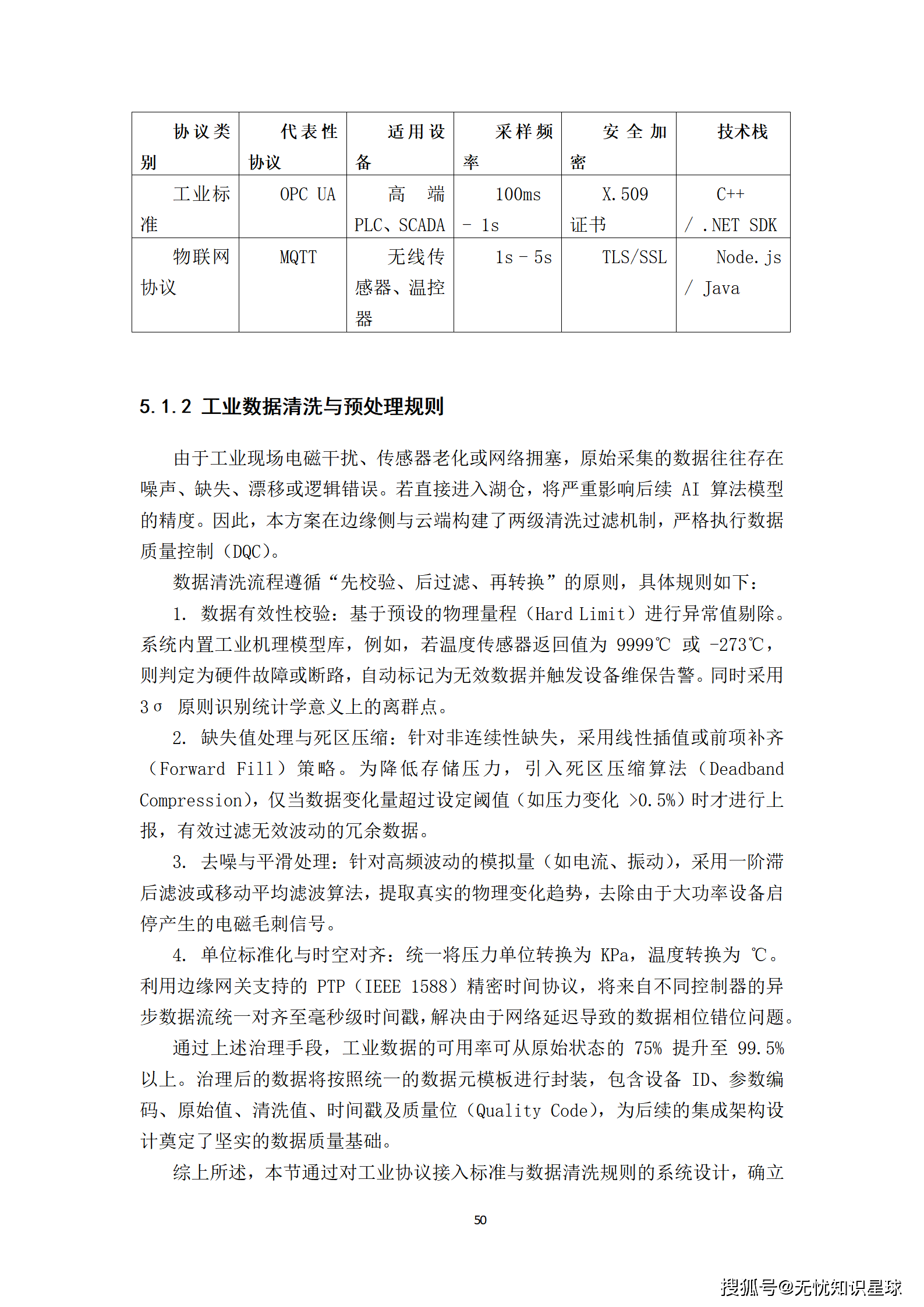
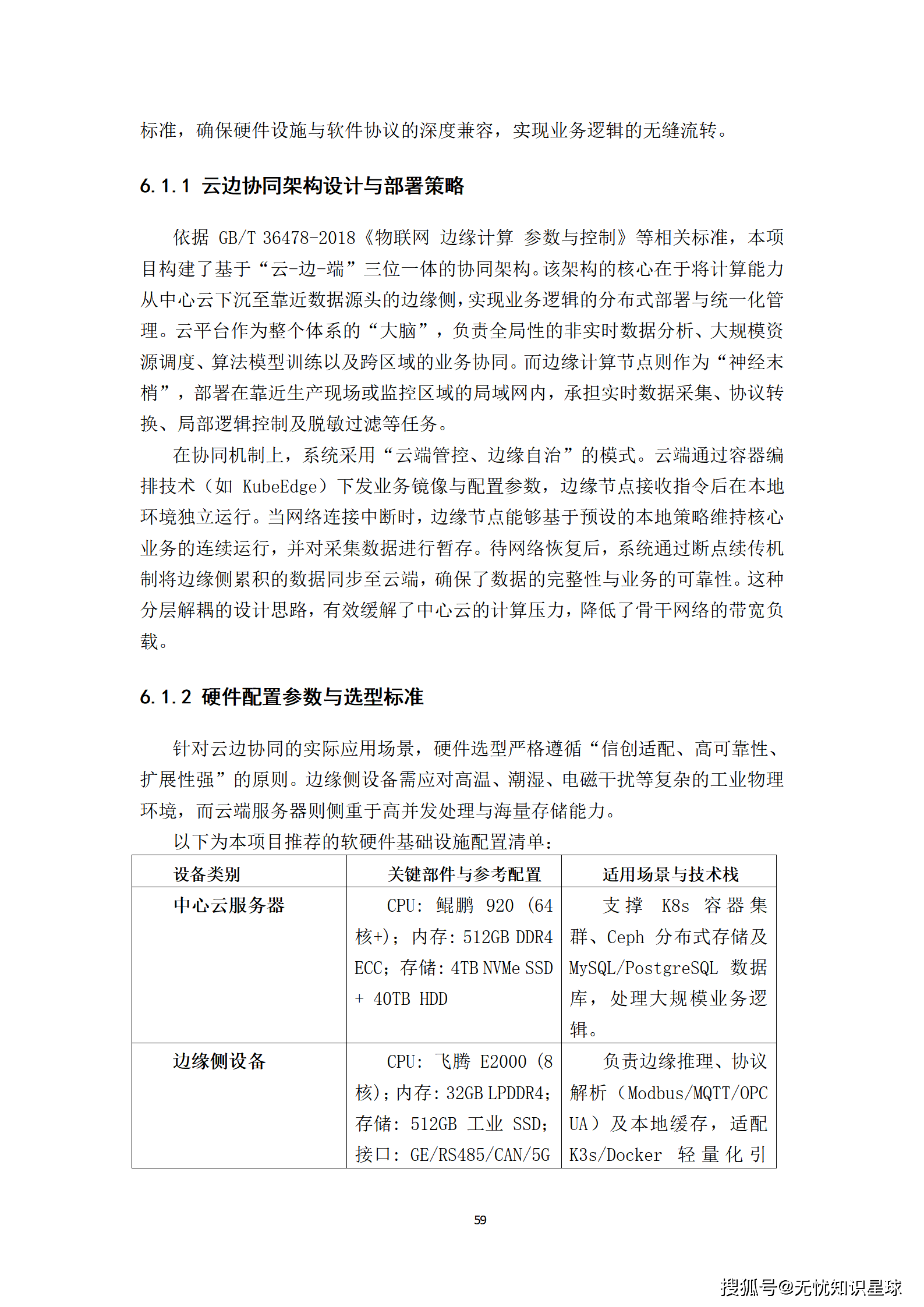
- 边缘采集:部署高性能边缘网关(Intel Atom/飞腾E2000),支持Modbus、MQTT、OPC UA等协议。
- 数据清洗:执行有效性校验(3σ原则)、缺失值插补、死区压缩及去噪平滑,数据可用率从75%提升至99.5%。
- 时空对齐:利用PTP(IEEE 1588)精密时间协议,将异步数据流统一对齐至毫秒级。
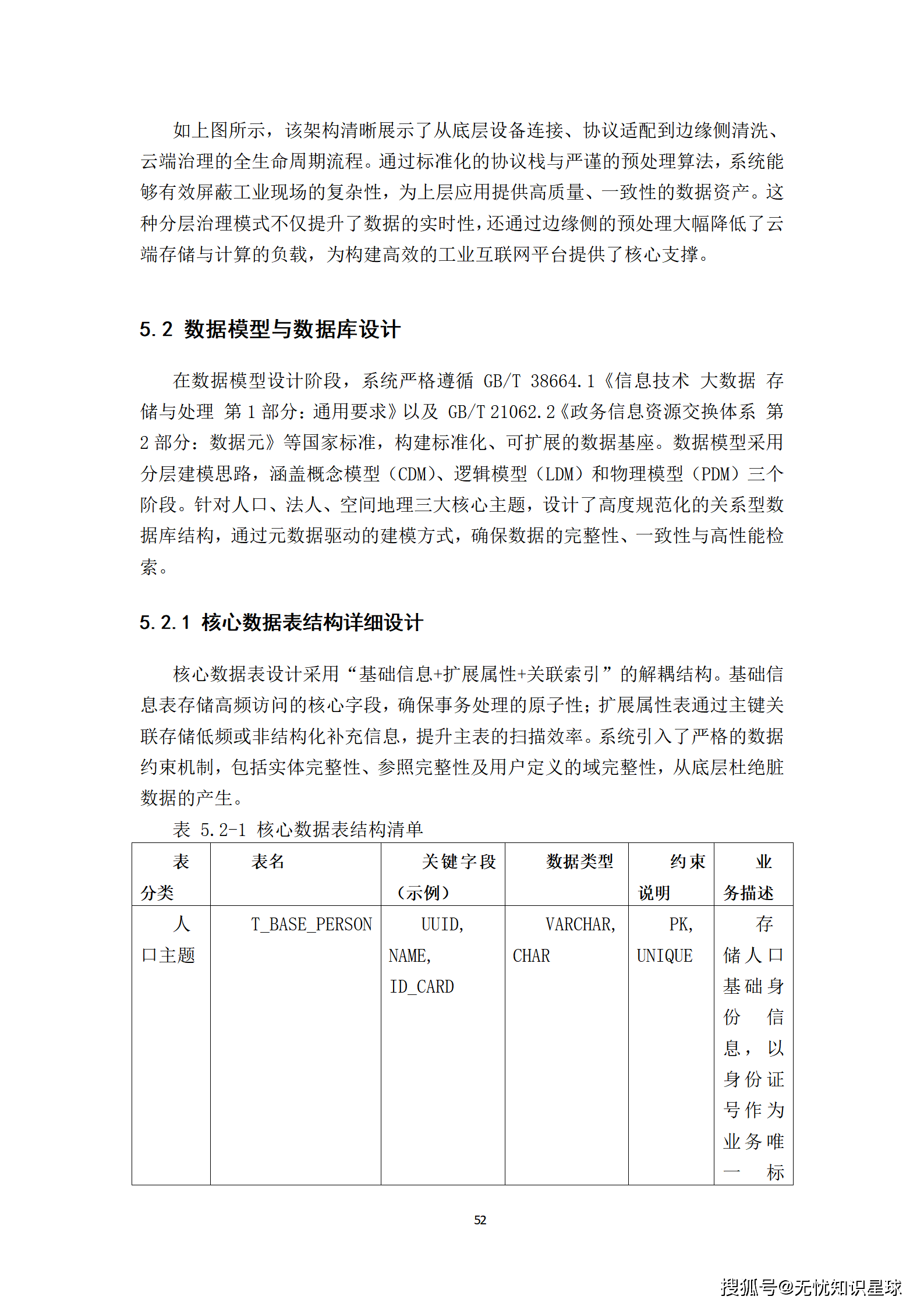
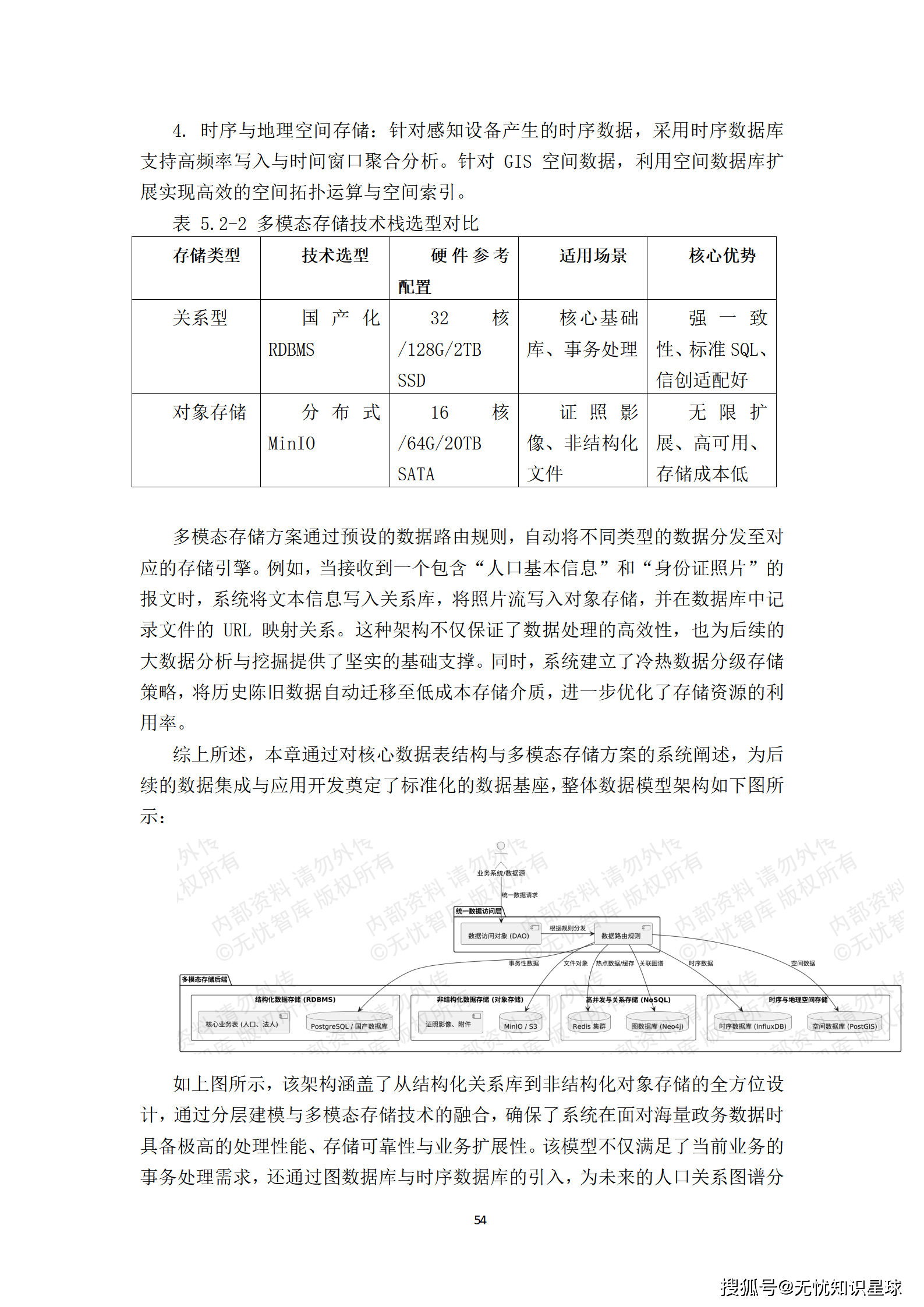
6.2 多模态存储架构
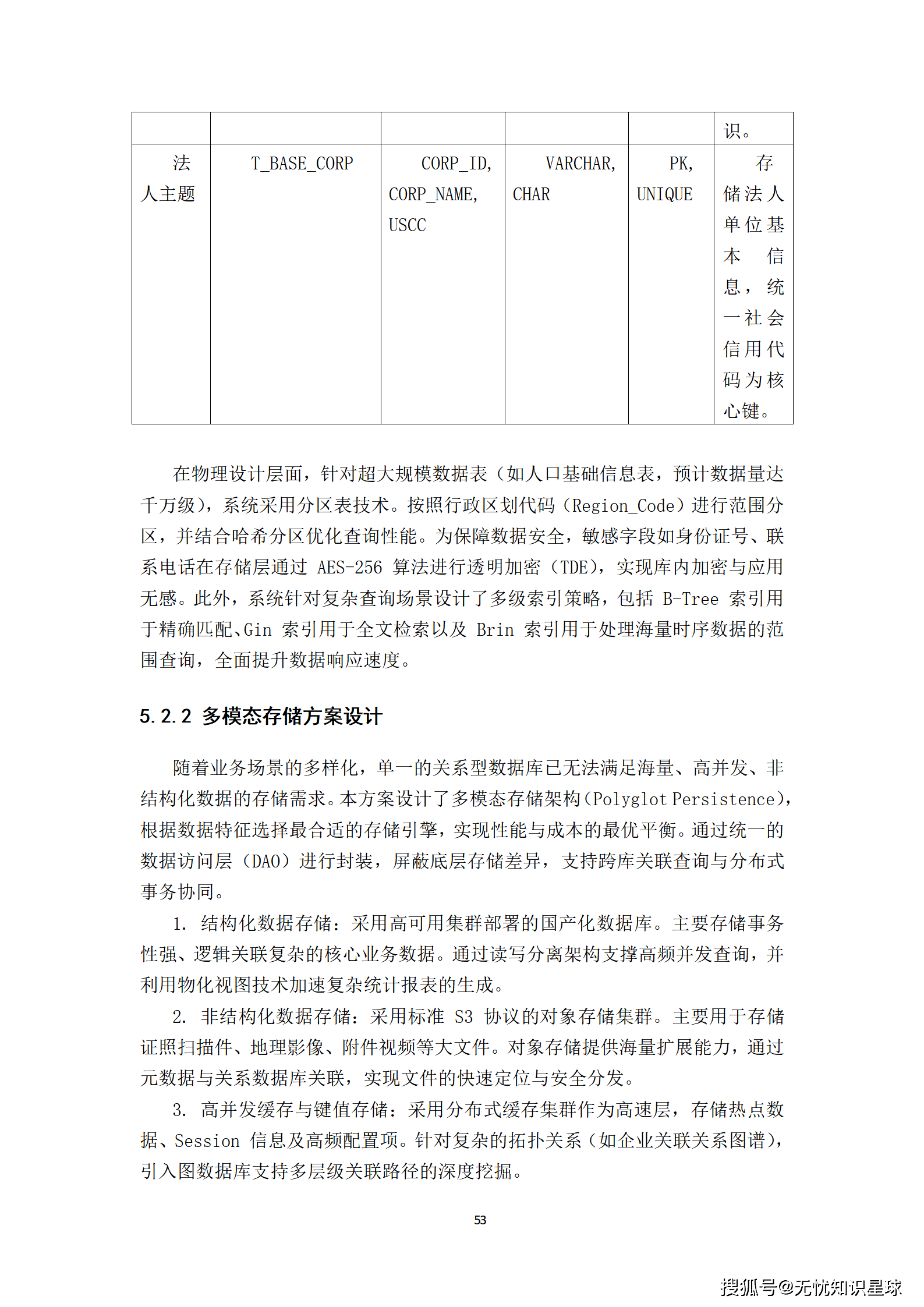
- 关系型存储:国产数据库(达梦/人大金仓),存储核心事务数据,支持MGR集群。
- 时序存储:InfluxDB/TDengine,存储海量传感器数据,高压缩比。
- 对象存储:MinIO/OSS,存储证照、视频等非结构化数据。
- 缓存与搜索:Redis集群 + Elasticsearch,支撑高并发检索。
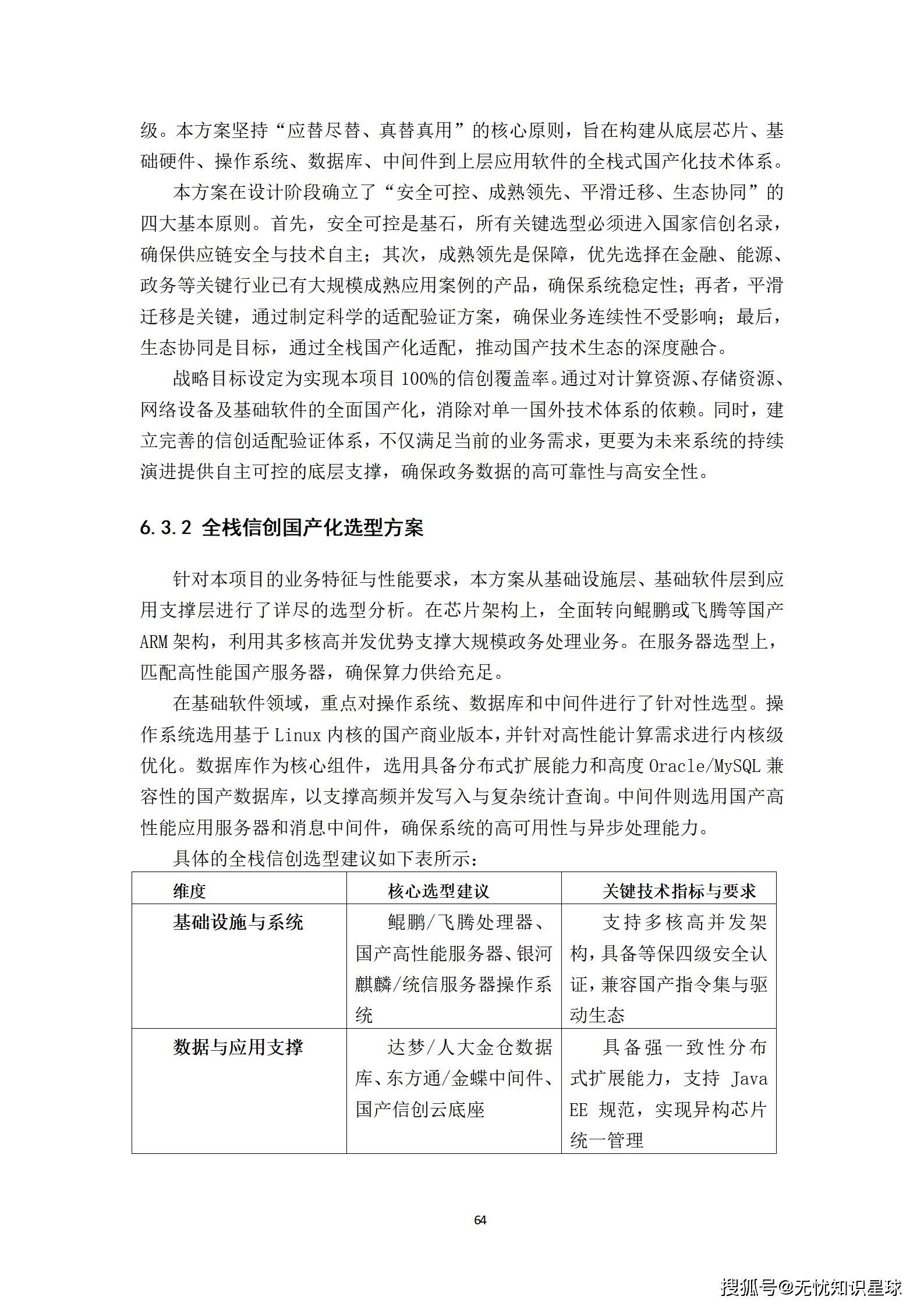
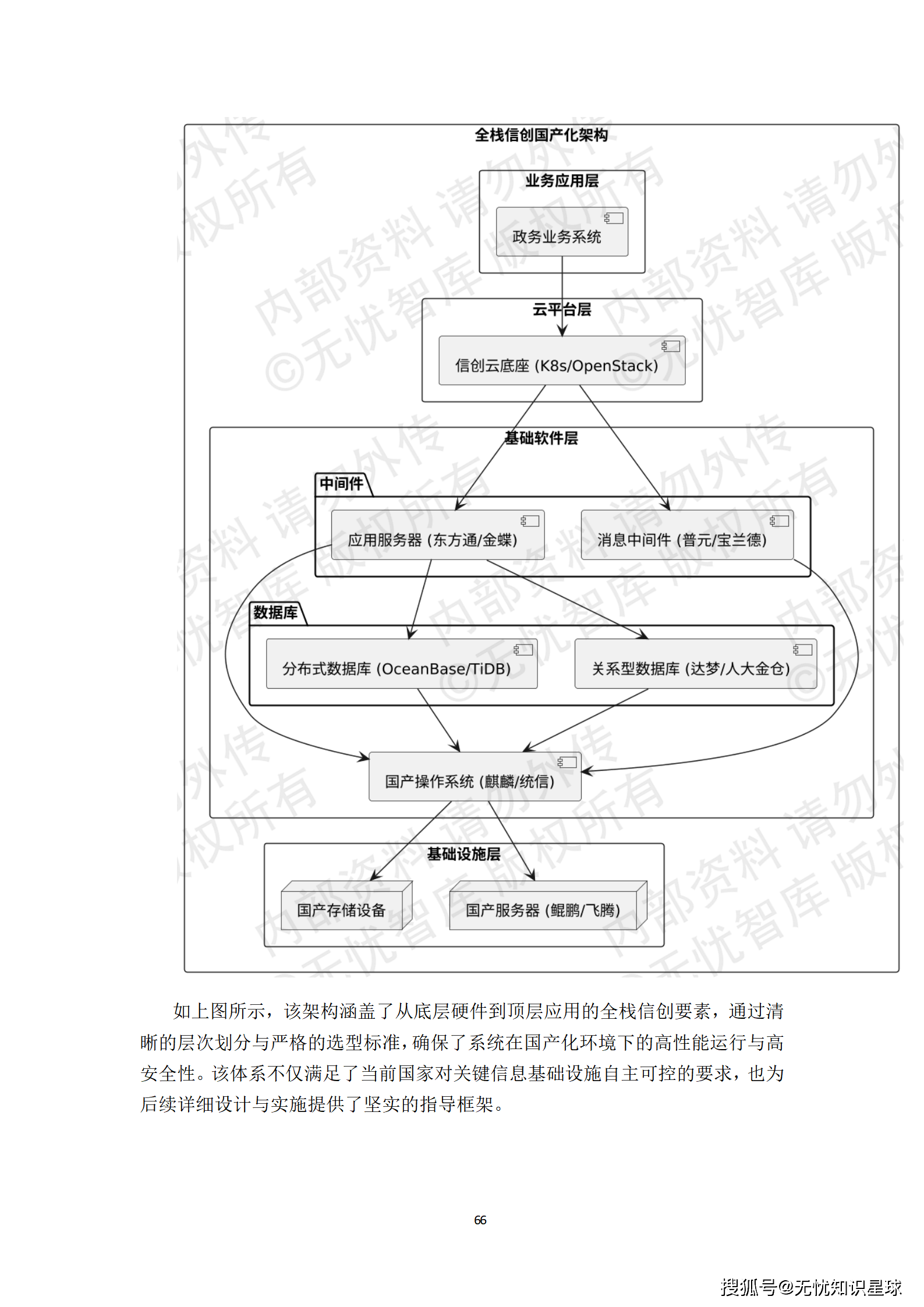
6.3 全栈信创国产化替代
项目严格遵循“应替尽替”原则,实现100%信创覆盖率:
- 芯片:鲲鹏920 / 飞腾E2000。
- 操作系统:银河麒麟 / 统信UOS。
- 数据库:达梦DM8 / 人大金仓。
- 中间件:东方通 / 金蝶天燕。
- 适配验证:建立专门信创实验室,进行性能压测与兼容性调优,确保业务“零中断”迁移。
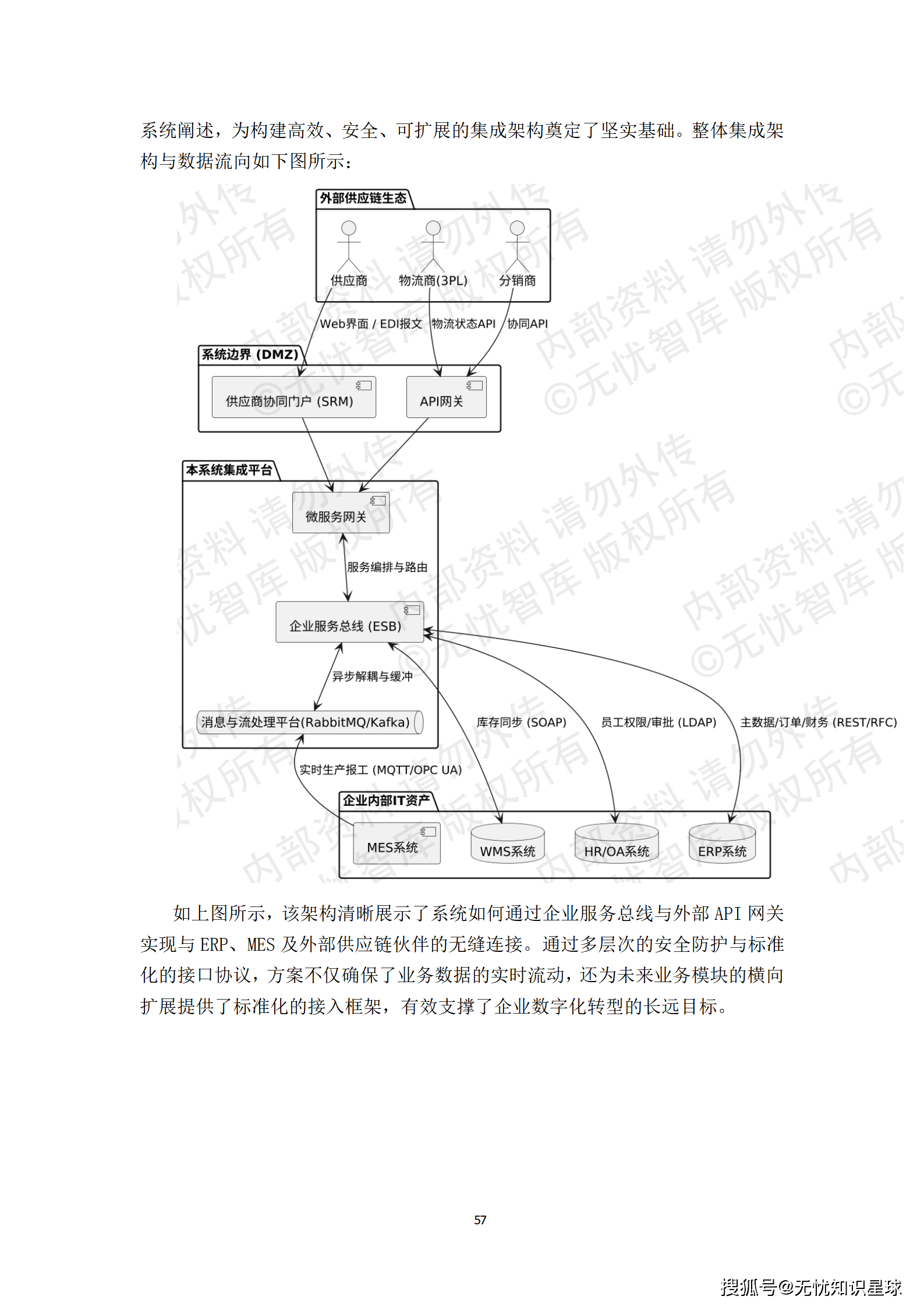
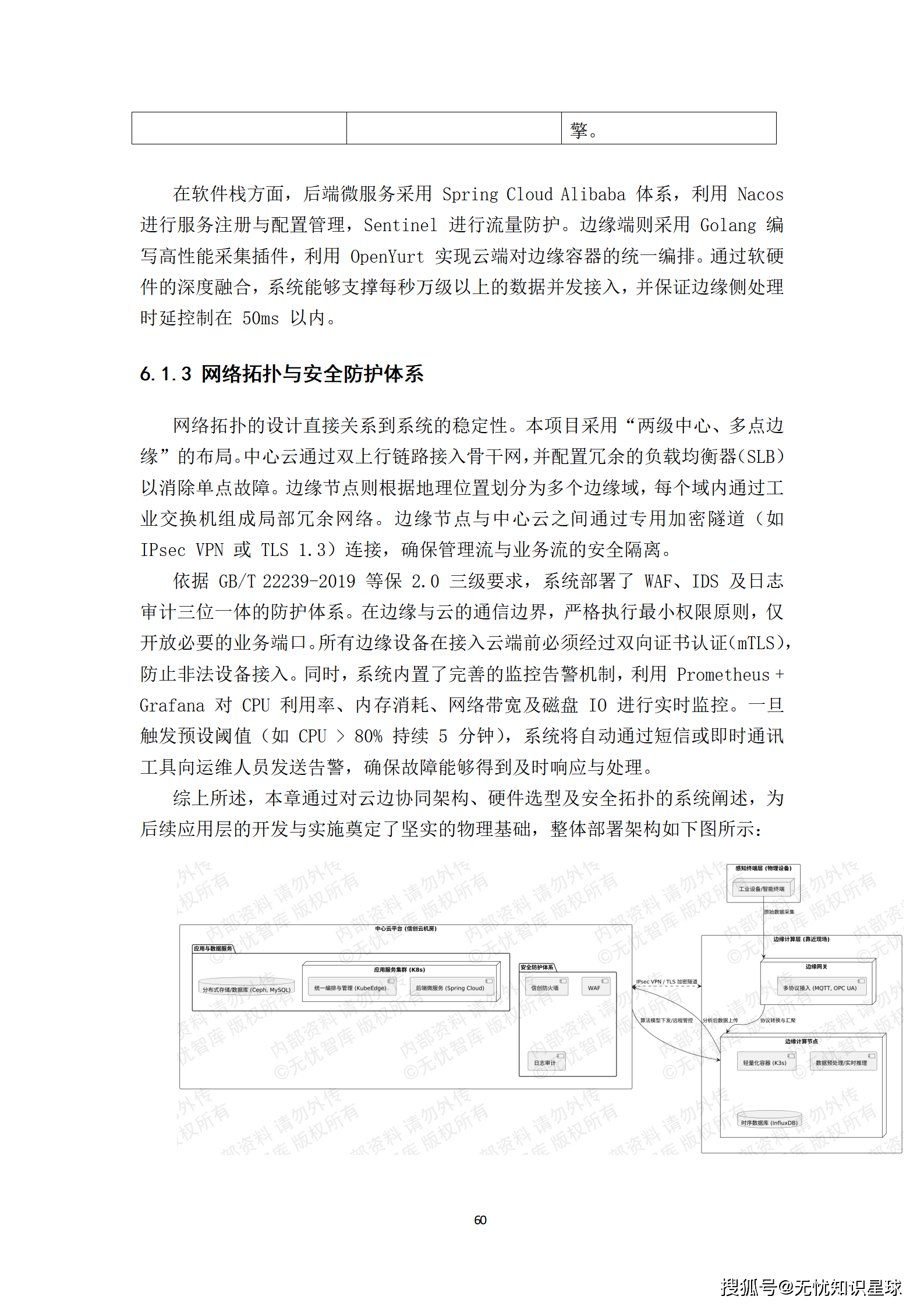
七、网络安全与等保设计:构筑纵深防御体系
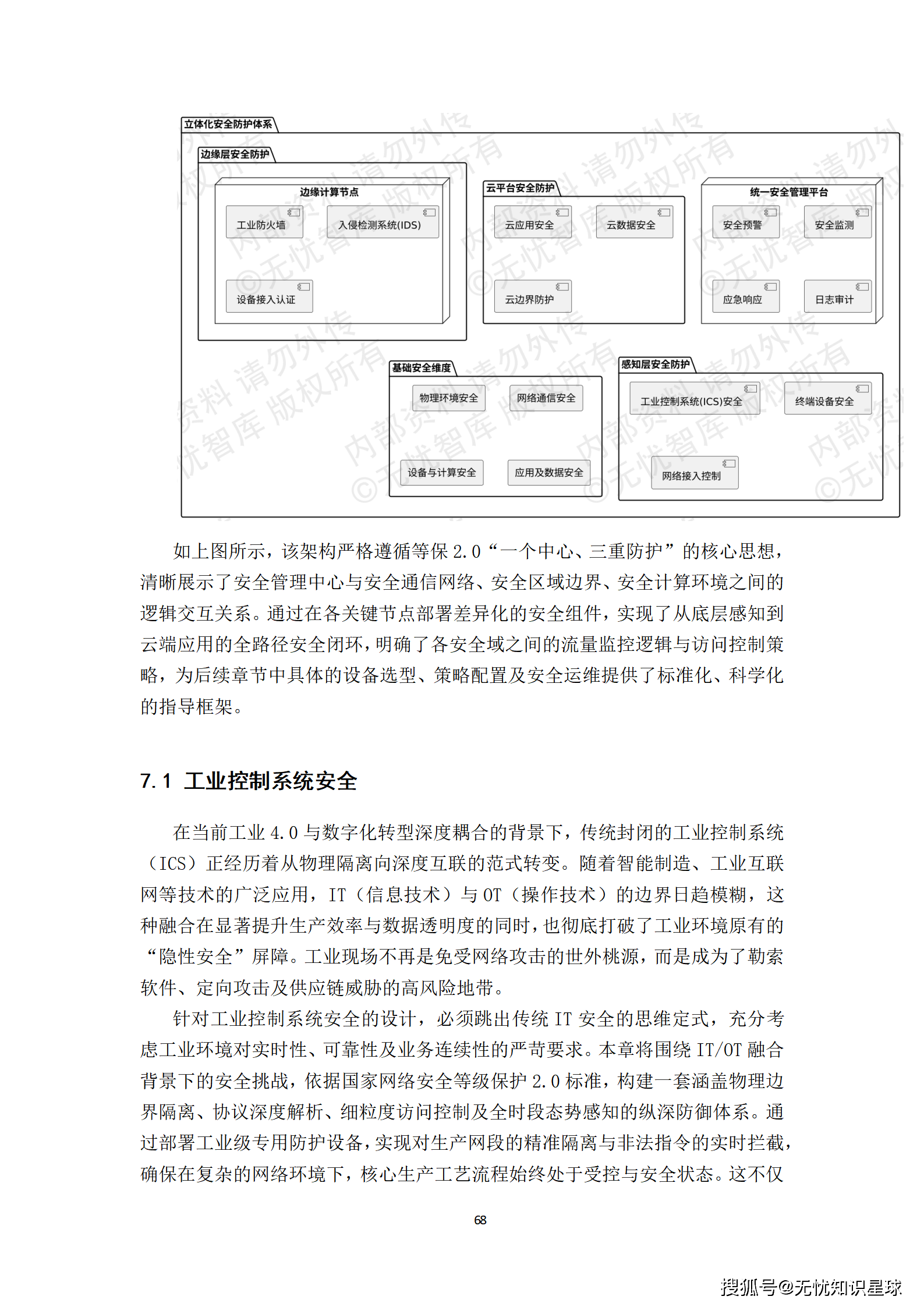
严格遵循等保2.0三级标准,构建“一个中心,三重防护”体系。
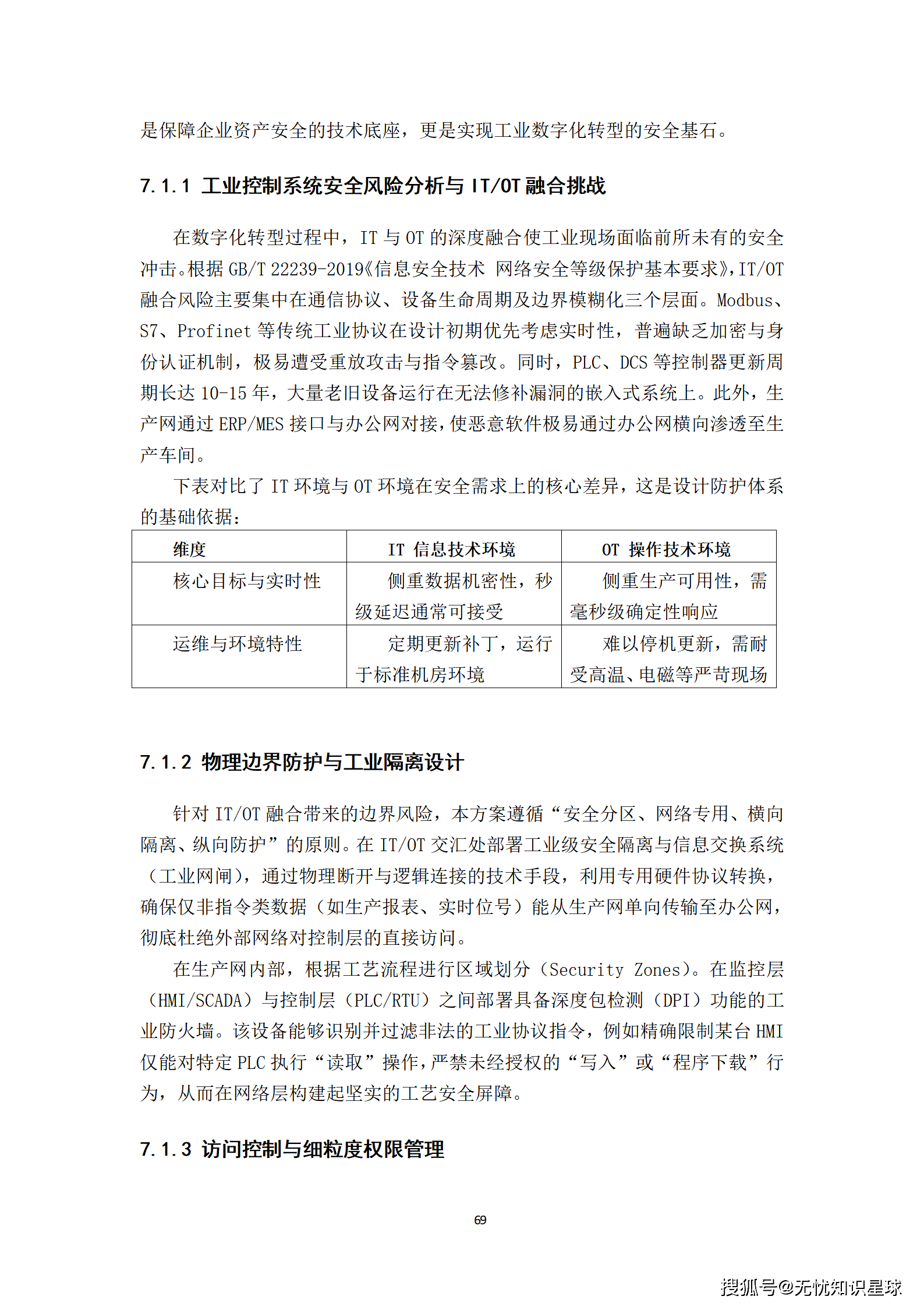
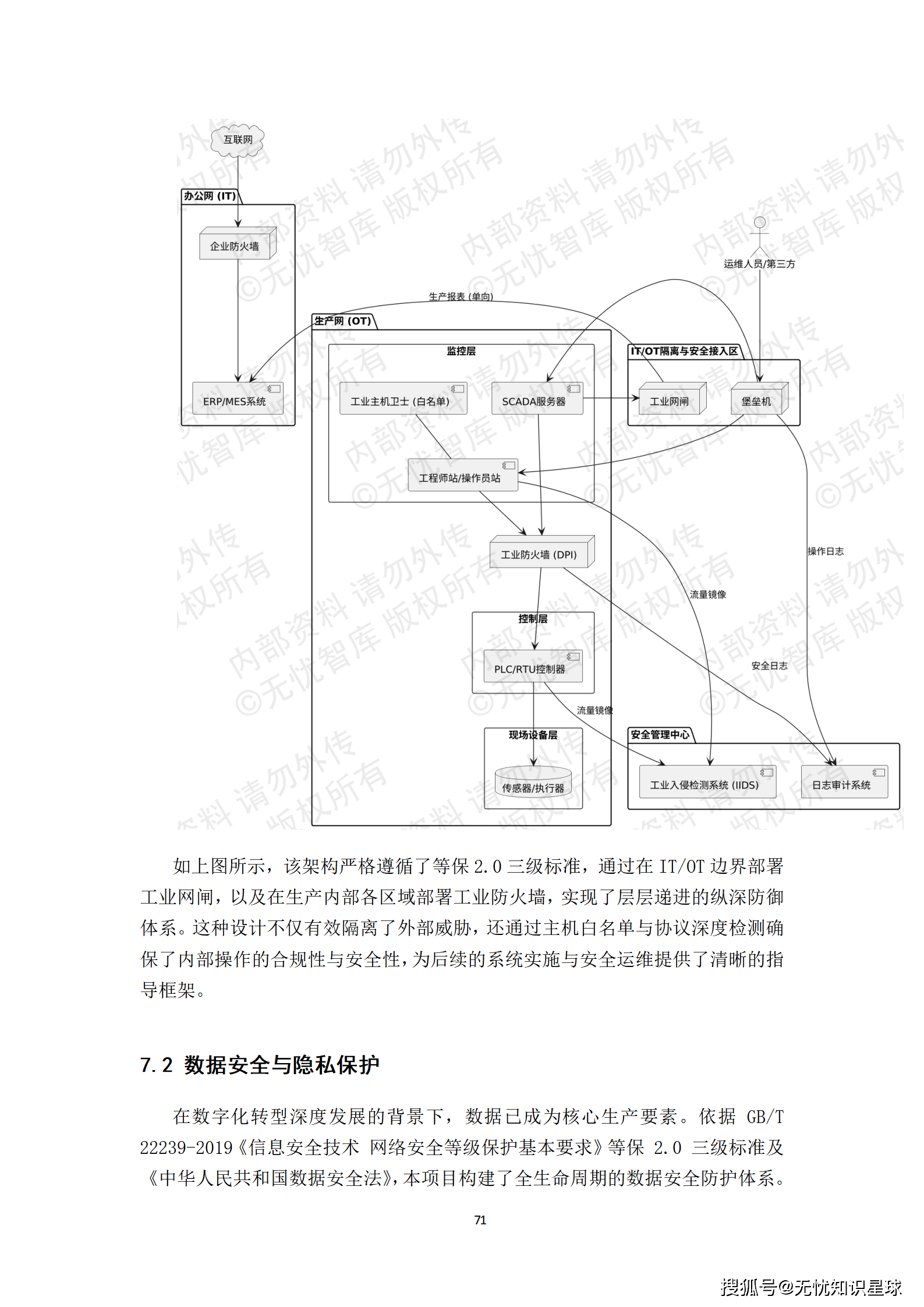
7.1 IT/OT融合安全
- 边界隔离:在IT/OT交汇处部署工业网闸,实现物理断开与逻辑连接,仅允许非指令类数据单向传输。
- 区域划分:在生产网内部按工艺流程划分安全域,部署具备**深度包检测(DPI)**功能的工业防火墙,拦截非法指令(如未经授权的写入操作)。
- 主机加固:上位机部署工业主机卫士,采用白名单机制,严禁未知程序运行。
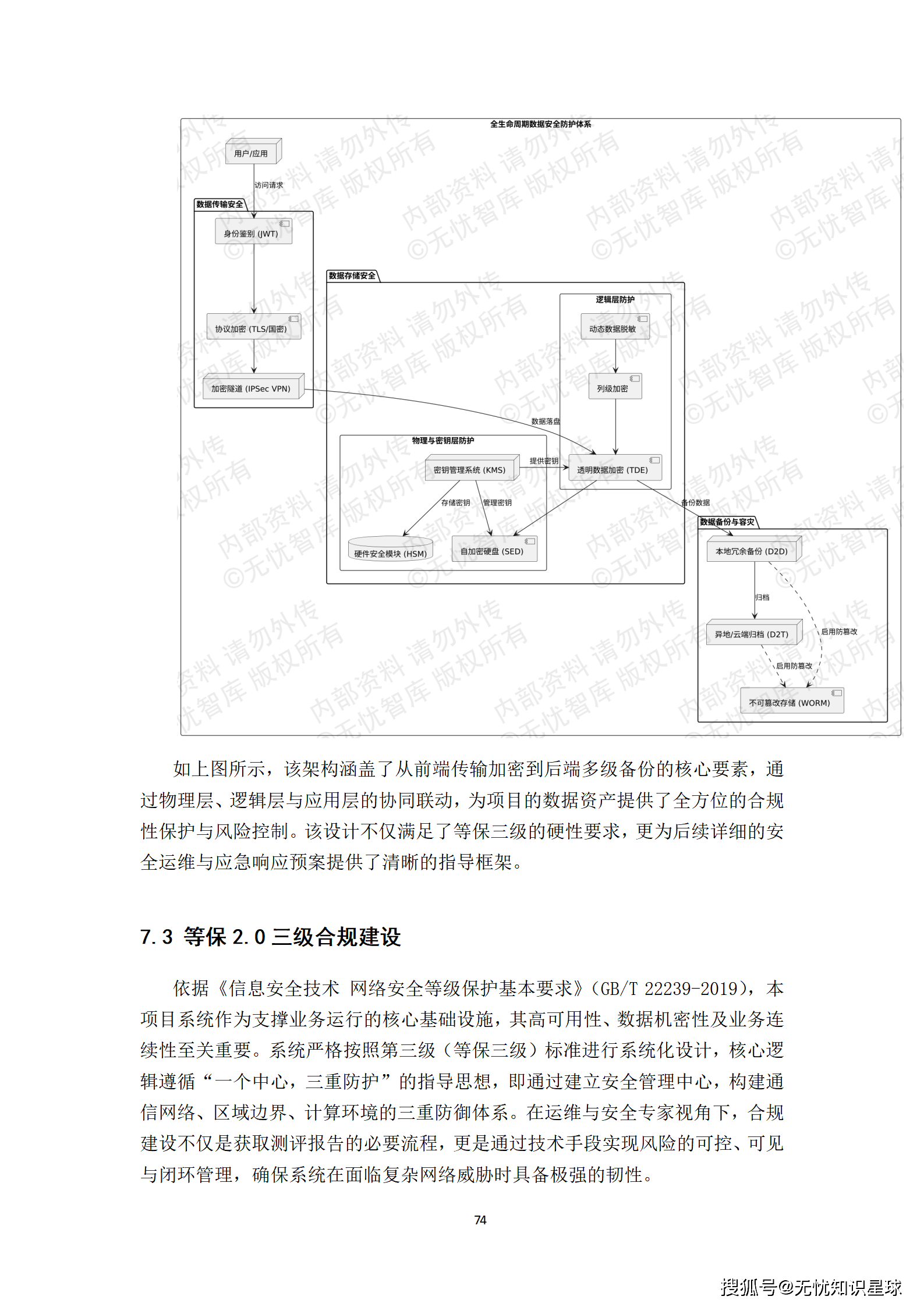
7.2 数据安全
- 传输加密:全面启用TLS 1.3,适配国密SM2/SM3/SM4算法。
- 存储加密:实施透明数据加密(TDE)与列级加密,敏感数据动态脱敏。
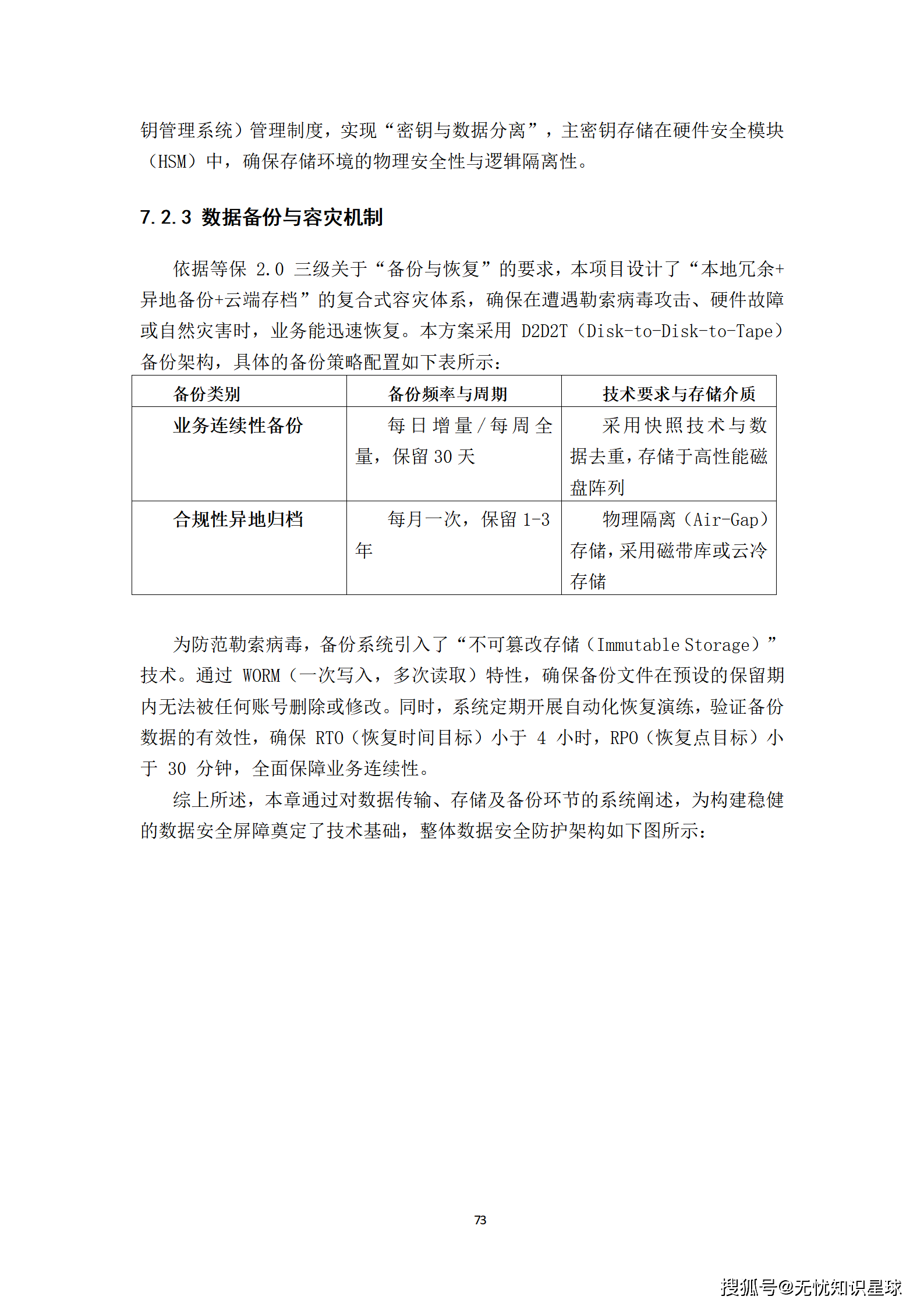
- 备份容灾:采用D2D2T架构,引入**不可篡改存储(Immutable Storage)**防范勒索病毒,RTO<4小时,RPO<30分钟。
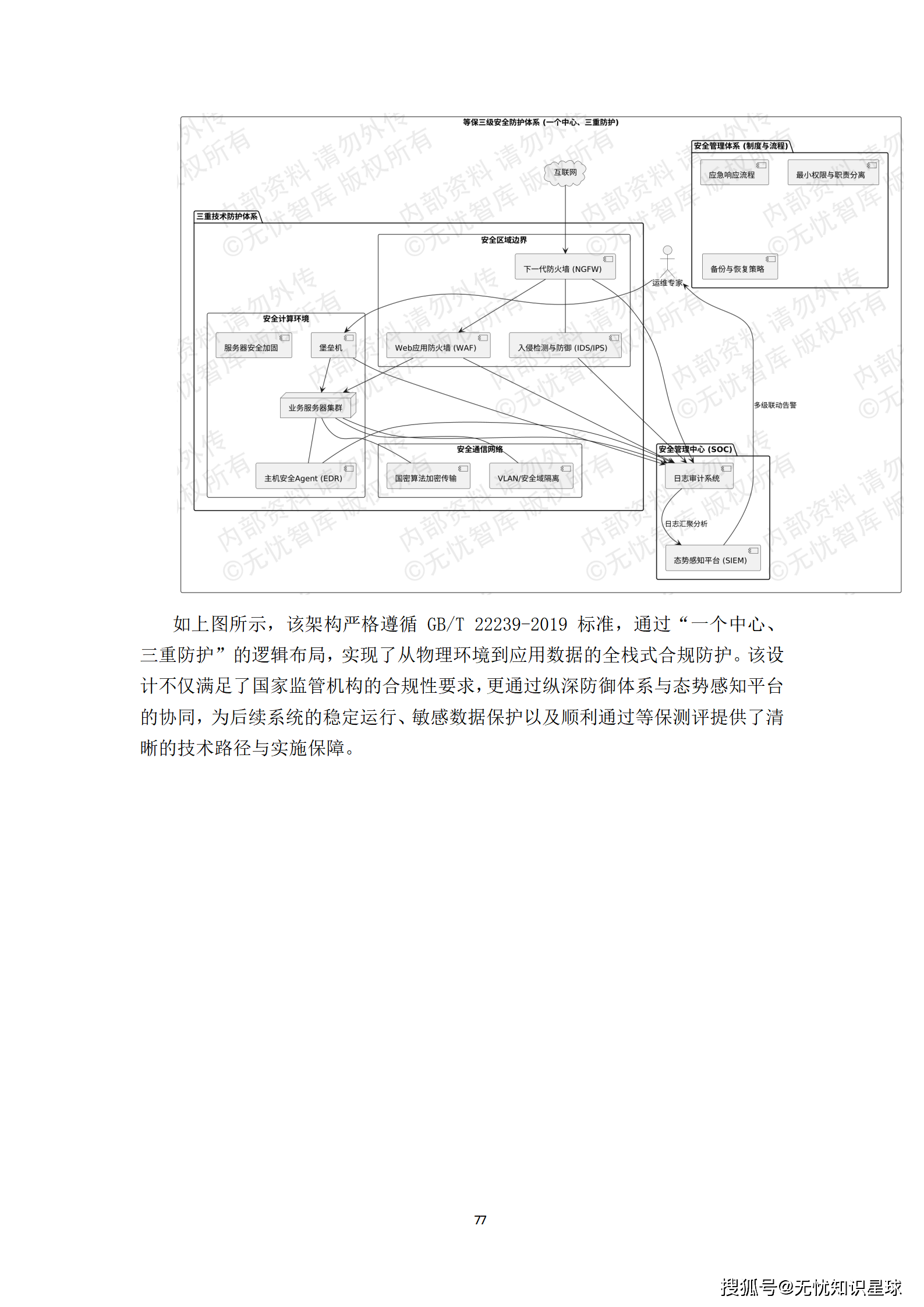
7.3 安全管理中心(SOC)
建设安全态势感知平台,汇聚全网日志,利用AI识别APT攻击,实现威胁的实时告警与联动处置。
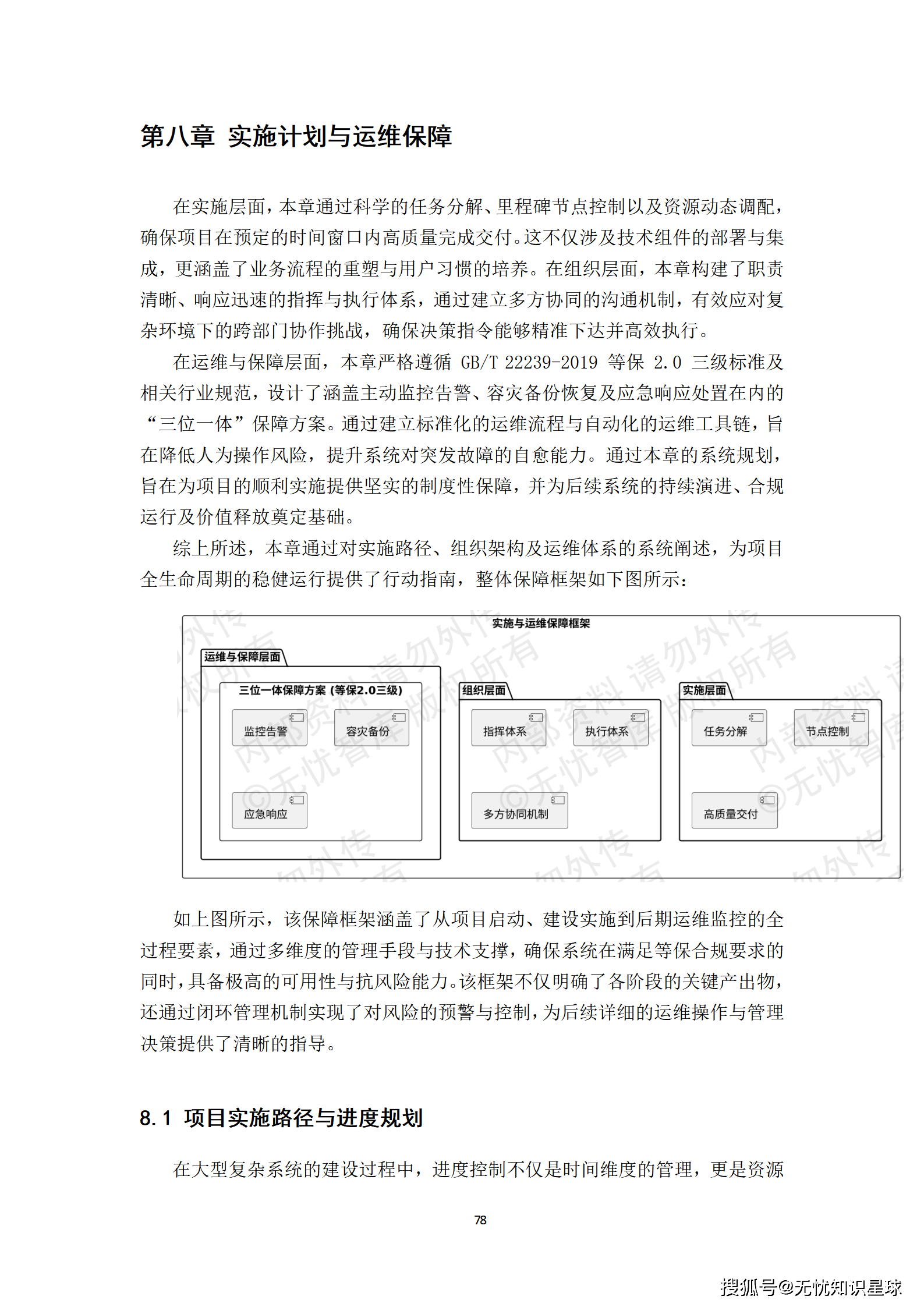
八、实施路径与运维保障:从蓝图到现实
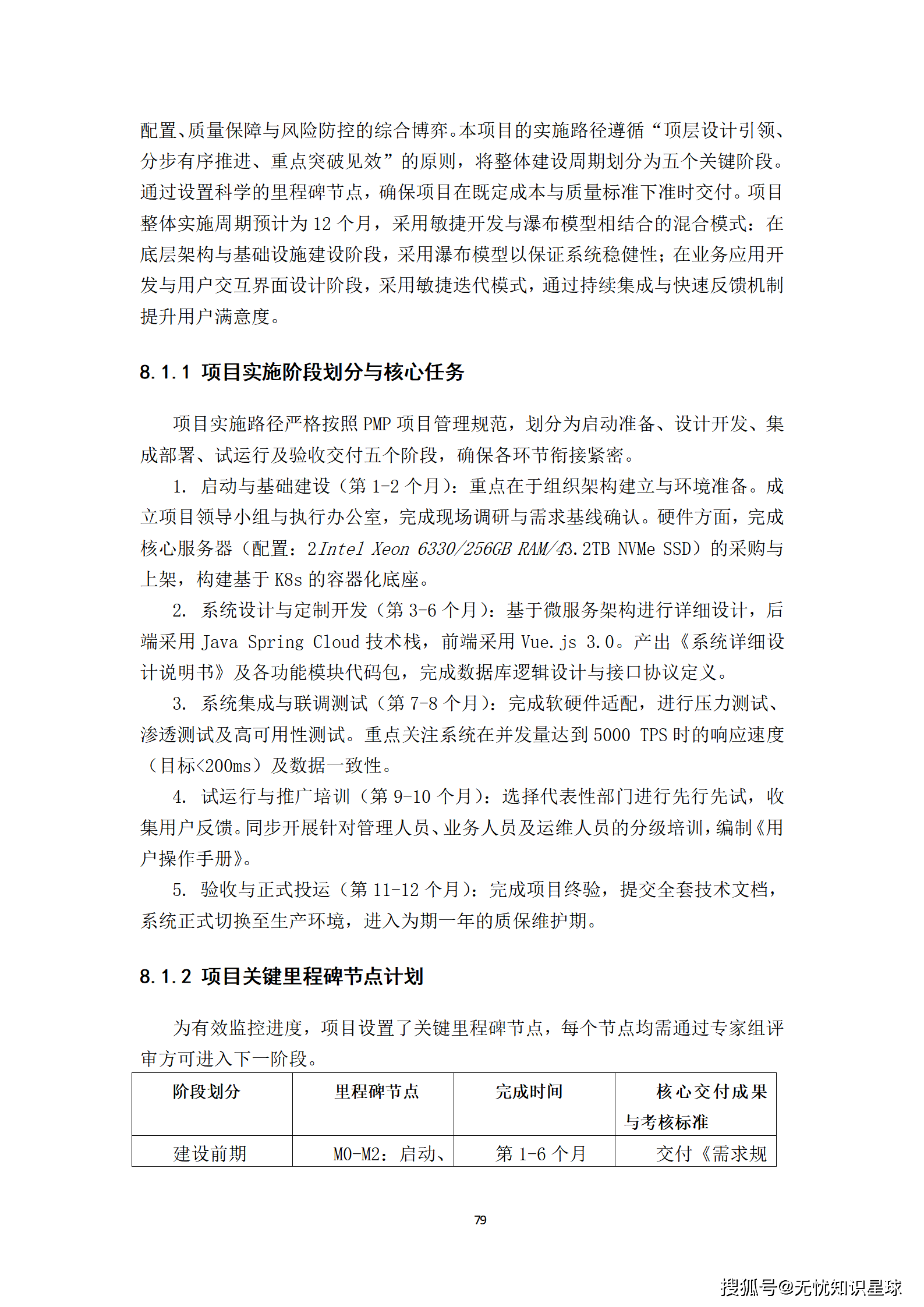
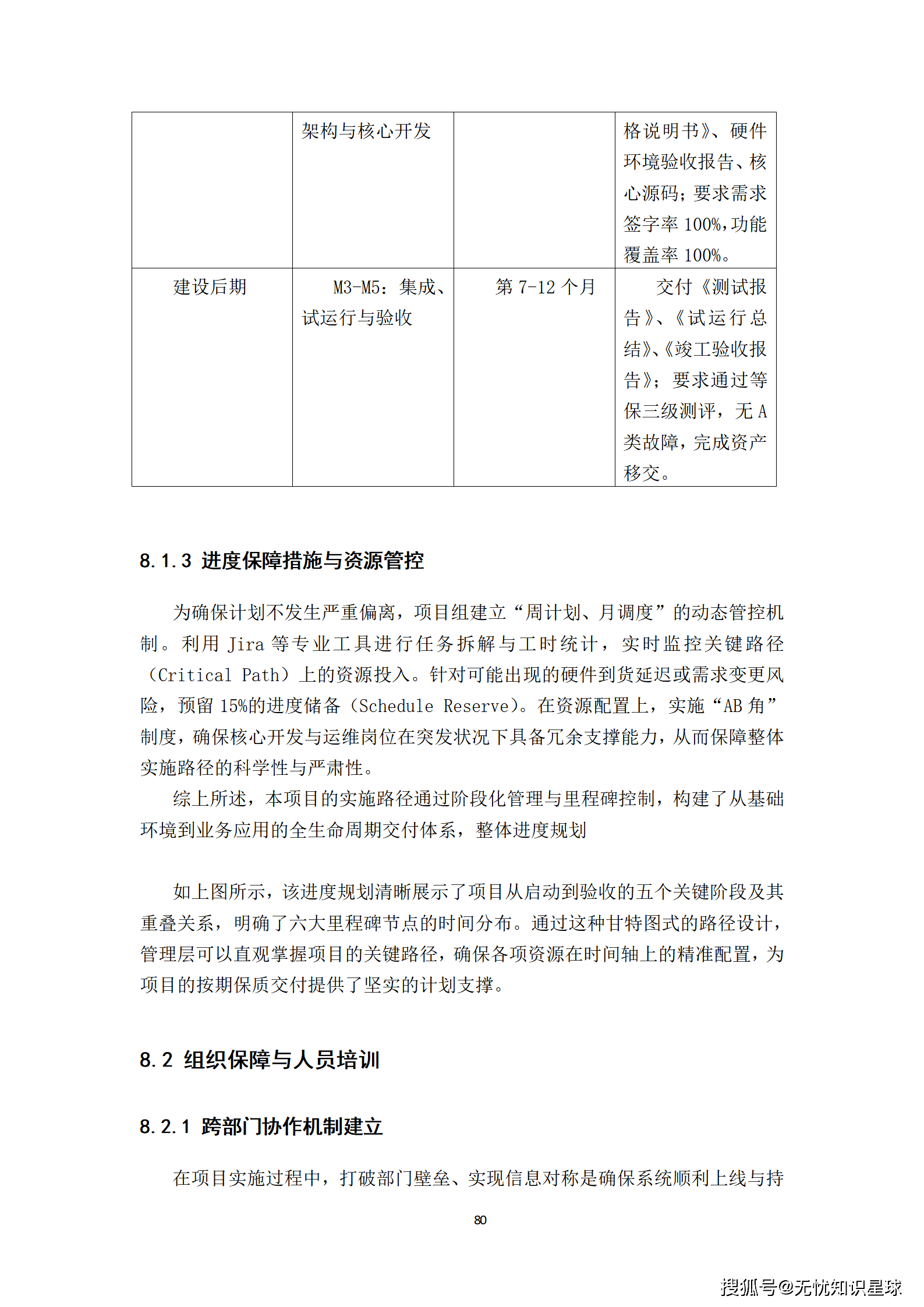
8.1 项目实施路径(12个月)
- 第1-2月(启动与基础):组织架构建立,硬件采购上架,K8s底座构建。
- 第3-6月(设计与开发):微服务详细设计,核心代码开发,数据库建模。
- 第7-8月(集成与测试):软硬件联调,压力测试(5000 TPS),渗透测试。
- 第9-10月(试运行):代表性部门先行先试,全员分级培训。
- 第11-12月(验收投运):项目终验,正式切换,进入质保期。
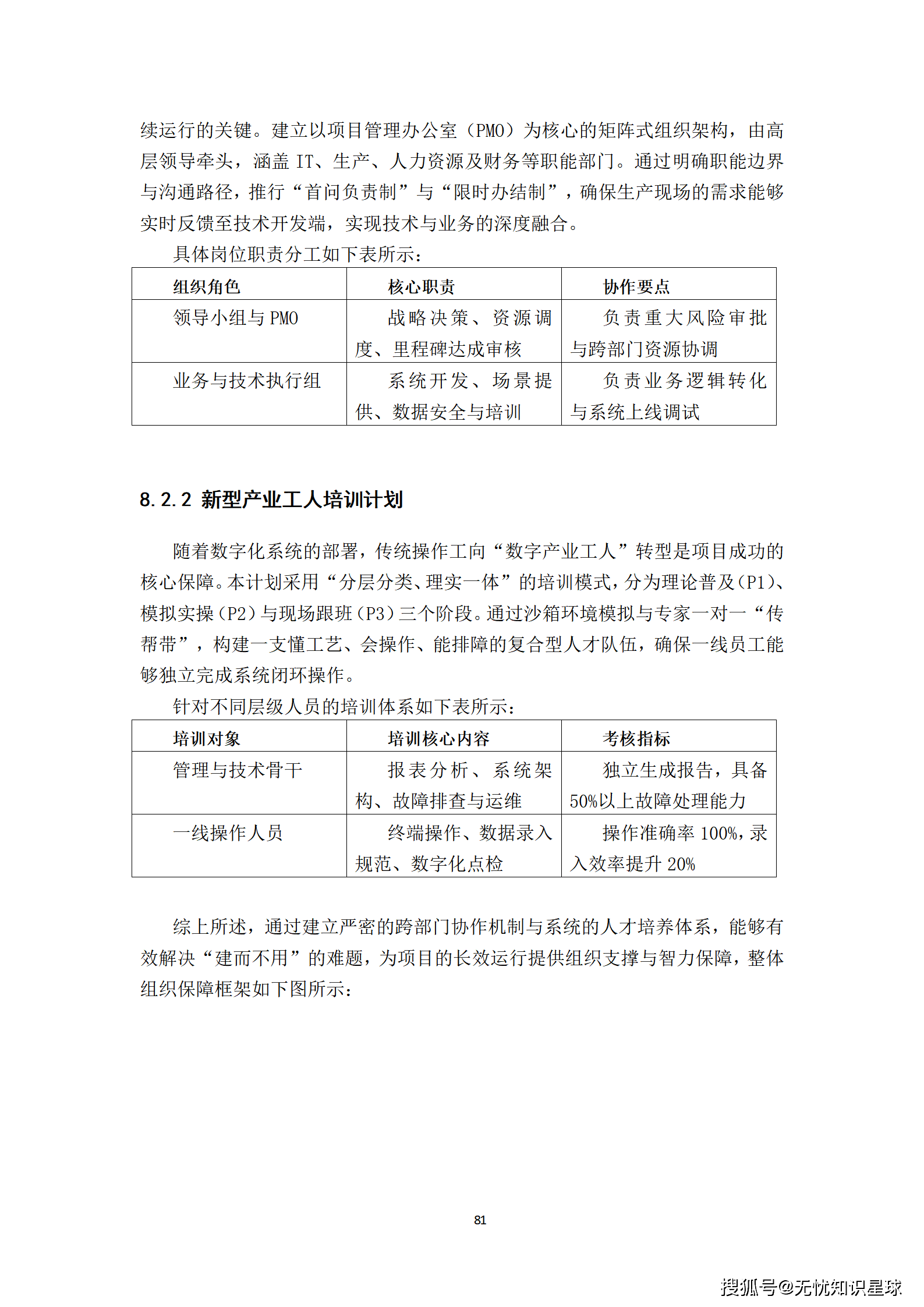
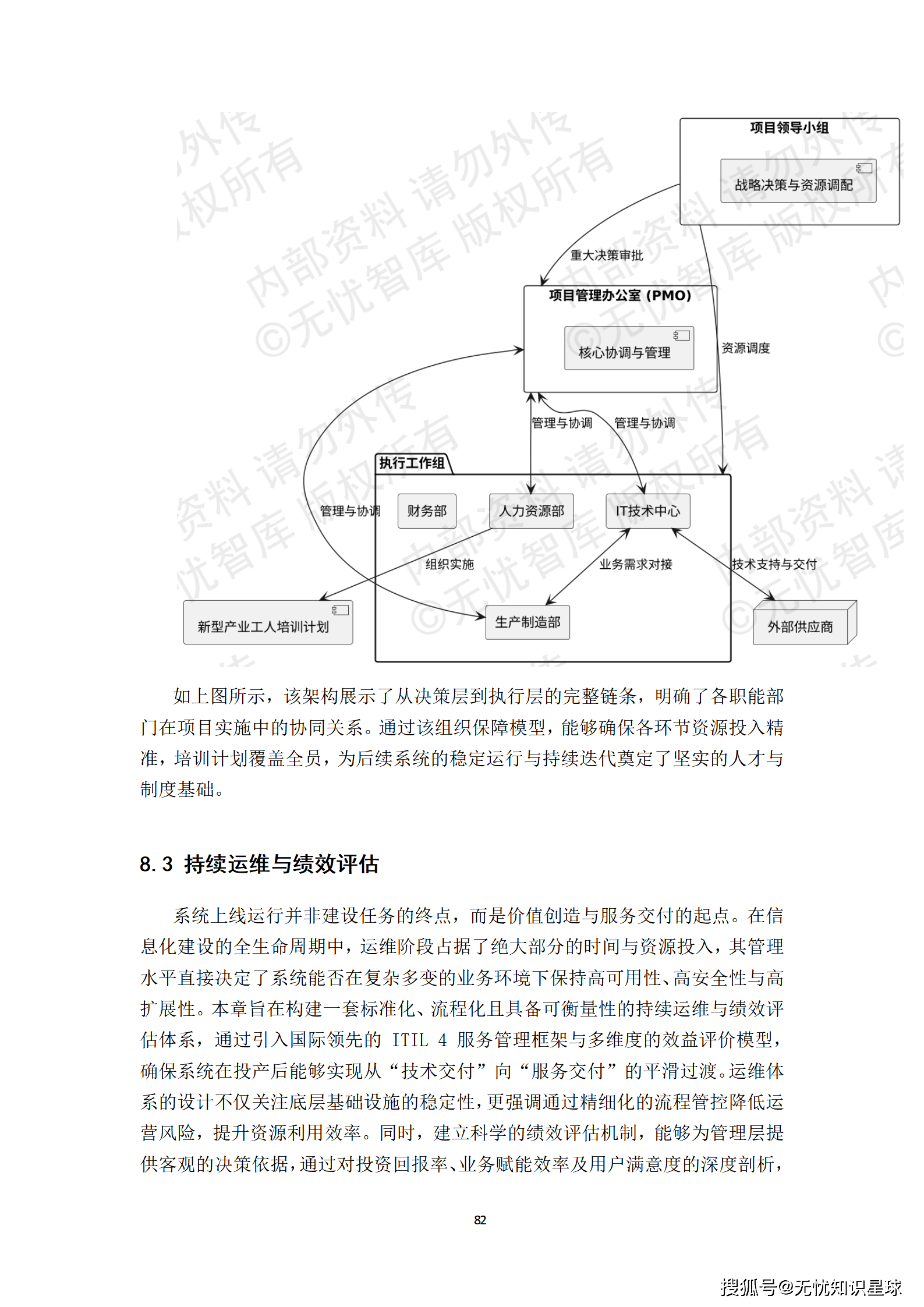
8.2 组织保障与人才转型
- 矩阵式架构:成立PMO,打破部门壁垒,推行“首问负责制”。
- 新型产业工人培训:传统操作工向“数字产业工人”转型。分为理论普及、模拟实操、现场跟班三阶段,培养懂工艺、会操作、能排障的复合型人才。
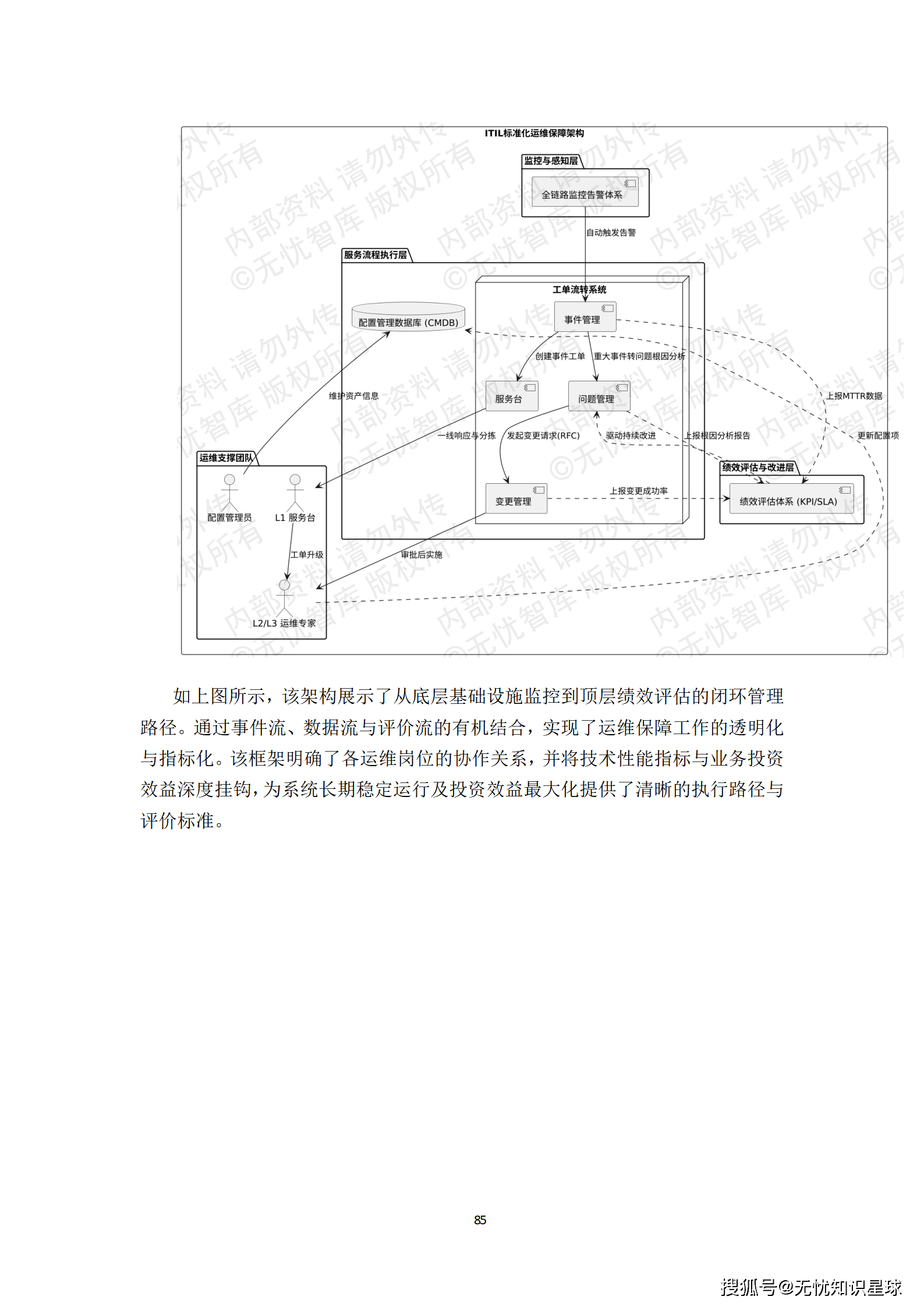
8.3 持续运维与绩效评估
- ITIL标准化流程:建立事件、问题、变更、配置管理五大核心模块。
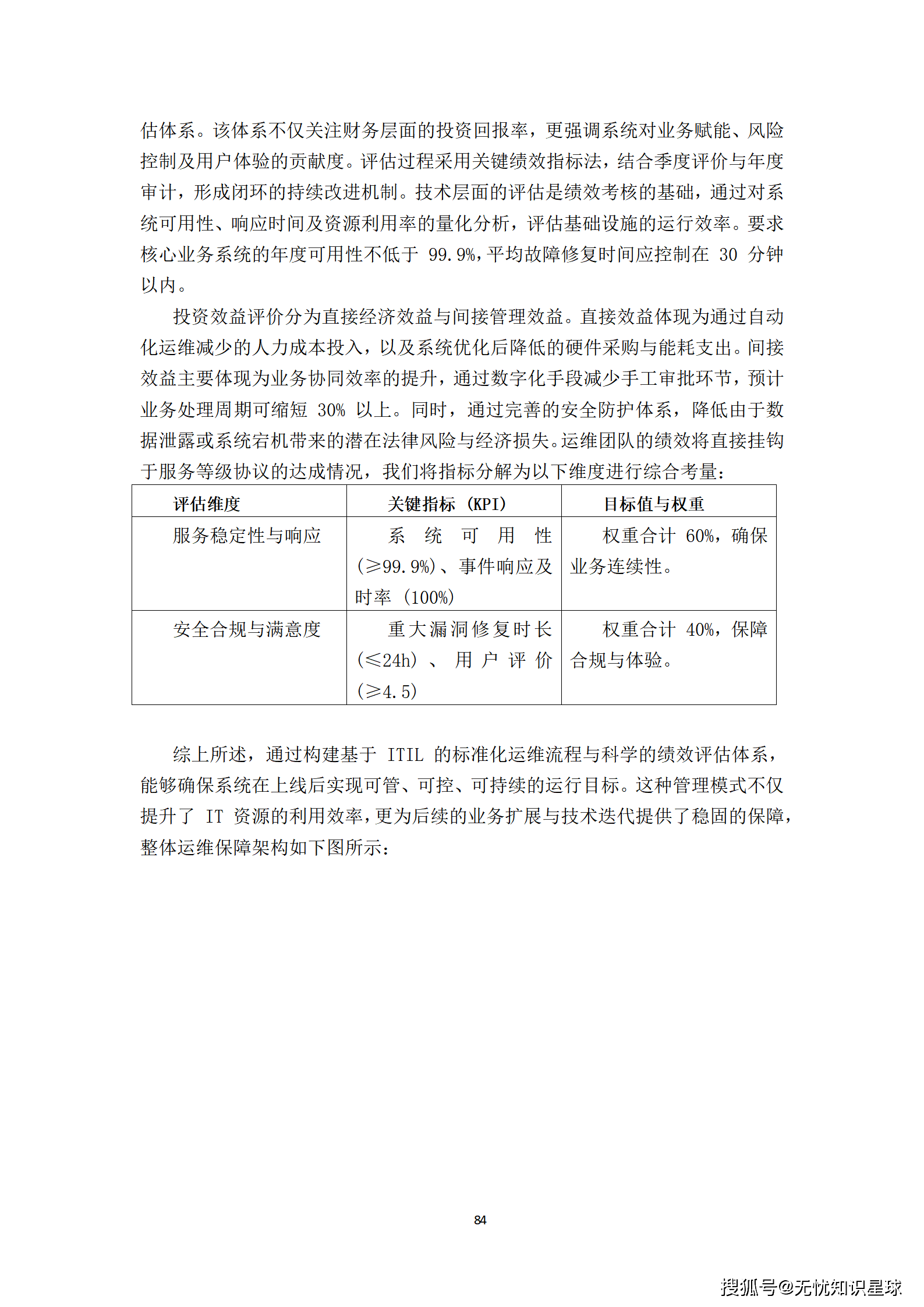
- 绩效评估体系:服务稳定性:可用性≥99.9%,事件响应及时率100%。安全合规:重大漏洞修复≤24h。投资效益:量化人力成本节约与业务效率提升。
九、结语:迈向新质生产力的未来工厂
某大型工厂的这份“十五五”建设方案,不仅是一次技术的堆砌,更是一场深刻的生产关系重构。
通过多Agent柔性排程,工厂拥有了“群体智慧”,能够像生物群落一样自适应环境变化;通过人形机器人与黑灯工厂,人类从危险、重复的劳动中解放出来,转向更高价值的创新工作;通过全栈信创与纵深安全,筑牢了国家工业安全的底线。
预计项目建成后,将实现OEE提升至85%以上,交付周期缩短40%,年节约成本逾千万元。更重要的是,它将树立起“十五五”期间全球制造业数字化转型的卓越典范,证明中国制造业完全有能力在新一轮工业革命中占据制高点。
未来已来,唯变不破。这不仅是某一家工厂的转型之路,更是中国制造迈向**“中国智造”**的缩影。让我们期待这座“黑灯工厂”点亮中国制造业的未来之光!
💡 核心知识点总结
- 多Agent调度(MAS):解决传统APS排程僵化问题的利器。核心是去中心化、合同网协议(CNP)和局部重调度。
- 黑灯工厂关键技术:100Hz高频采集、人形机器人视觉伺服、5G-uRLLC低时延协同。
- 数字孪生价值:不仅仅是3D可视化,更是实时映射、故障追溯和预测性维护的底座。
- 信创全栈替代:从芯片(鲲鹏/飞腾)到数据库(达梦/金仓),实现100%自主可控是硬指标。
- 等保2.0三级:工业安全的核心是IT/OT隔离、协议深度检测和白名单机制。



DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 30
30 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)