基于动态窗口算法的AGV仿真避障 可设置起点目标点,设置地图,设置移动障碍物起始点目标点
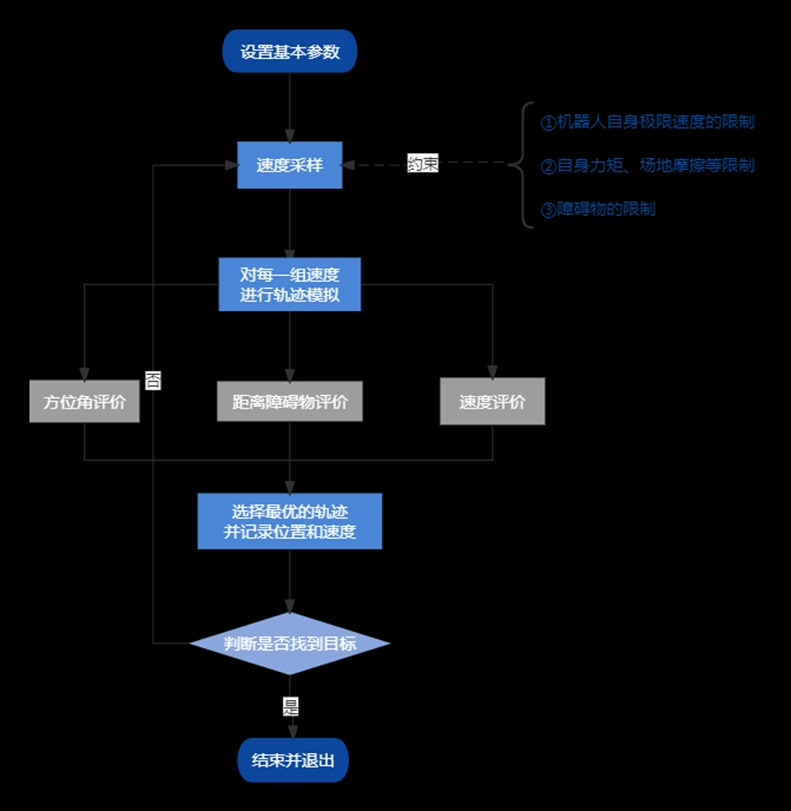
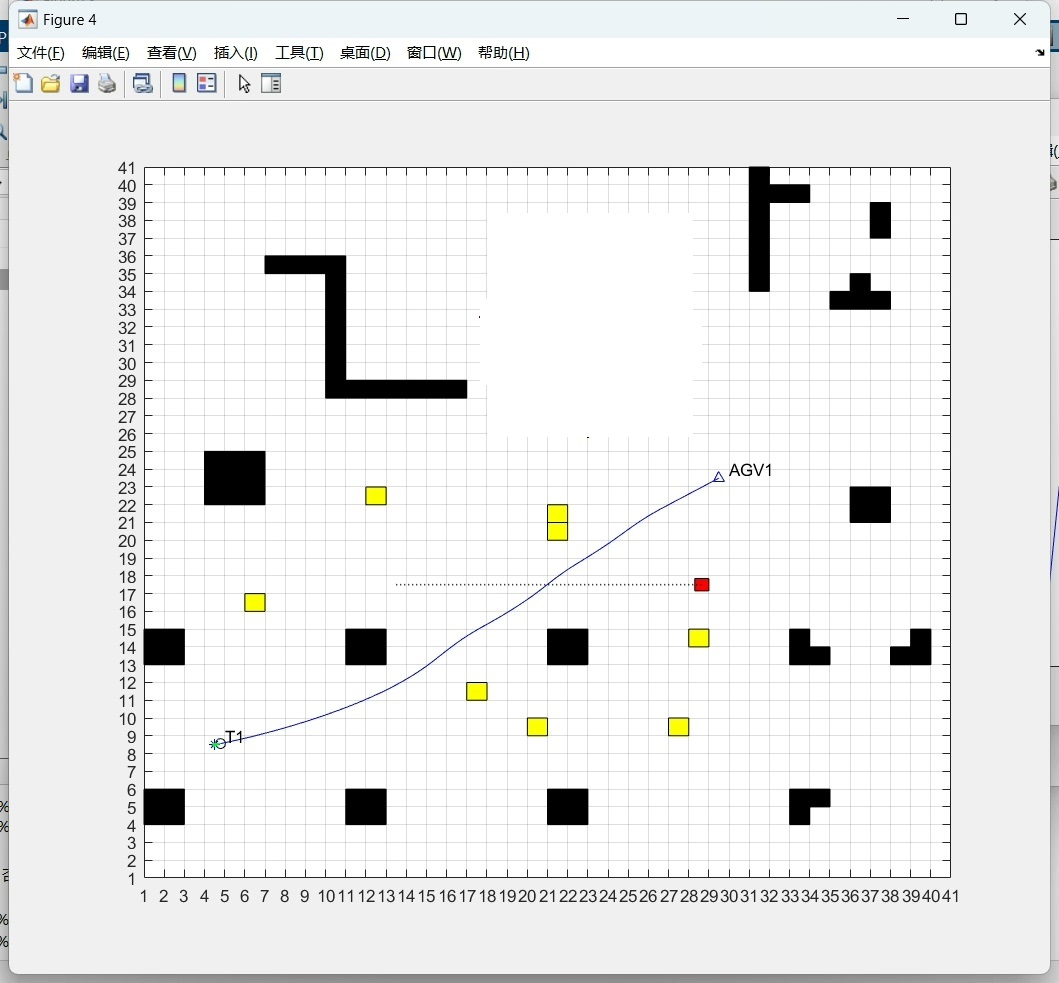
基于动态窗口算法的AGV仿真避障 可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物 动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。 黄色是静态障碍物,红色是可移动障碍物
一、系统整体定位与核心目标
本系统围绕多自动导引车(AGV)在协同作业场景下的实时路径规划与安全避障需求构建,以“优先级调度+动态窗口算法(DWA)”为核心技术框架,旨在解决多AGV同时运行时的路径冲突问题,确保各AGV在复杂动态环境中既能高效执行既定任务,又能通过精准的避障逻辑保障运行安全。系统设计聚焦“功能实用性”与“场景适配性”,所有模块均围绕“实时性”与“安全性”两大核心目标展开,可直接应用于需要多AGV协同作业的仓储、制造、物流等自动化场景。
二、核心功能模块详解
(一)AGV优先级调度模块:构建多设备协同基础规则
优先级调度是多AGV协同运行的核心前提,该模块通过预设明确的优先级规则,为不同AGV分配差异化的通行权限,从源头规避多设备并行时的路径冲突风险,具体功能如下:
- 优先级规则固化与执行:系统明确设定AGV优先级层级为“AGV1 > AGV2 > AGV3”,该规则贯穿多AGV运行全过程,所有涉及设备相遇、路径交叉的场景均以该优先级作为通行权判定依据。在代码逻辑中,优先级参数将作为核心判断条件嵌入AGV状态监测与决策流程,当多AGV进入同一空间范围时,系统可自动读取各AGV的标识信息,匹配对应的优先级等级,快速完成通行权归属判定。
- 优先级与避障逻辑的联动:优先级规则并非独立存在,而是与后续的避障处理模块深度绑定——高优先级AGV拥有“优先通过权”,低优先级AGV则承担“主动避让义务”。这种联动设计确保优先级规则不只是静态的等级划分,而是能转化为动态的设备行为指导,例如当AGV1与AGV2同时接近同一交叉区域时,系统可基于优先级判定结果,直接向AGV2发送“暂停指令”,向AGV1发送“继续行驶指令”,无需额外复杂的路径重新规划,大幅提升多设备协同效率。
- 优先级状态实时监测与更新:模块具备实时监测各AGV优先级状态的功能,可通过AGV的实时通信数据获取设备当前的运行状态(如是否正常行驶、是否处于故障模式等),并在特殊场景下灵活调整优先级执行逻辑(如高优先级AGV出现故障暂停时,可临时提升低优先级AGV的通行权限,避免整体作业停滞)。不过基于“说明.doc”文档内容,当前系统暂以固定优先级为主,后续可基于该模块框架扩展动态优先级调整功能。
(二)动态窗口算法(DWA)避障模块:实现精准实时避障
动态窗口算法是系统实现AGV个体避障的核心技术支撑,该模块通过“轨迹评价+最优选择”的逻辑,让AGV在行驶过程中能实时响应环境变化,自主选择安全且高效的行驶轨迹,具体功能拆解如下:
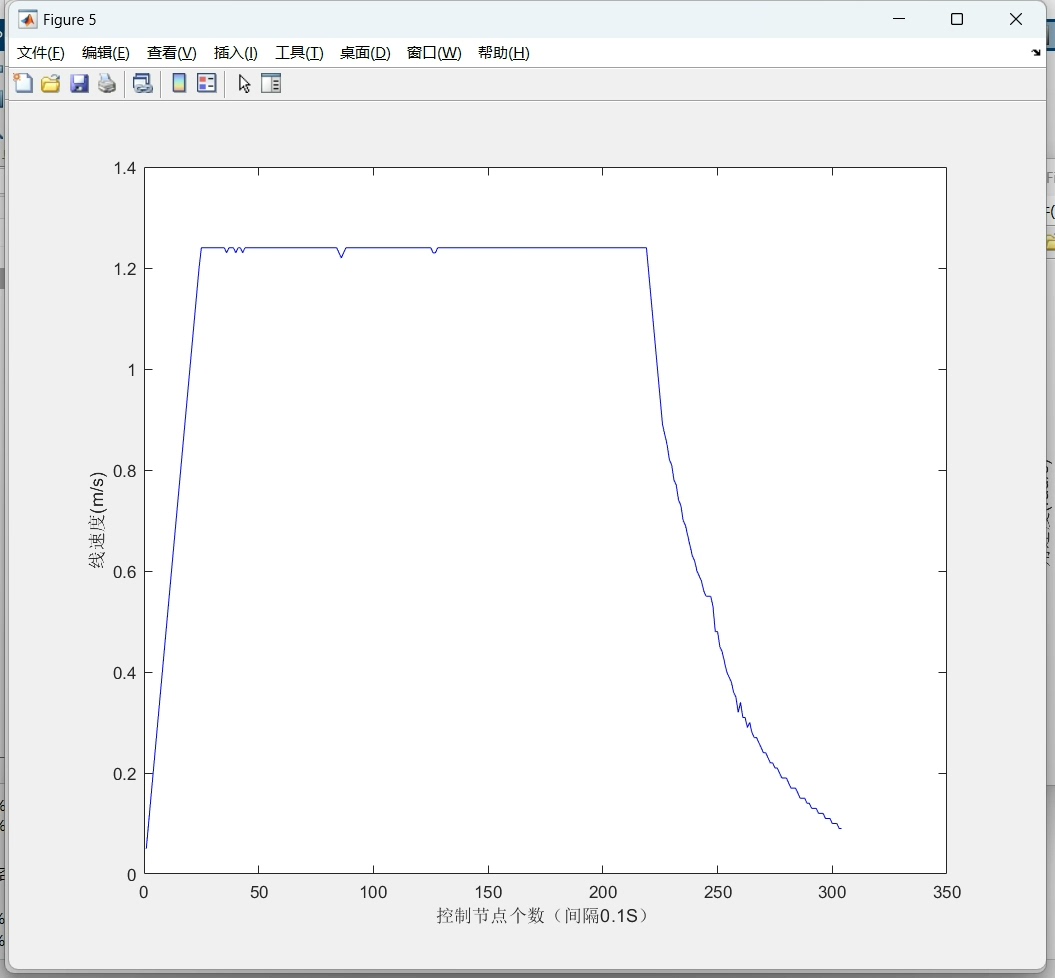
- 动态窗口构建:划定可行运动范围:算法首先基于AGV的物理性能参数(如最大速度、最大加速度、最大转向角速度等)与当前运行状态(如当前速度、当前位置),构建“动态窗口”——即AGV在当前时刻可实现的速度(线速度)与角速度(转向速度)的取值范围。该窗口的核心作用是“缩小轨迹搜索空间”,避免算法在无效的运动参数组合中浪费计算资源,确保避障决策的实时性。例如,当AGV当前速度为1m/s、最大加速度为0.5m/s²时,动态窗口会将下一时刻的线速度范围限定在0.5-1.5m/s之间(假设无反向减速需求),确保轨迹规划符合AGV的物理运动能力。
- 候选轨迹生成:覆盖所有可行路径:在动态窗口确定的速度与角速度范围内,算法会通过离散化处理,生成多条不同参数组合对应的候选轨迹。每条候选轨迹均基于AGV当前位置、预设的时间步长(如未来1秒内的运动轨迹)与运动学模型计算得出,可精准描述AGV在该参数组合下的行驶路径(包括位置坐标、方向角变化等)。例如,在角速度取值范围内,算法会每隔1°取一个离散值,结合不同的线速度值,生成数十条甚至上百条候选轨迹,确保覆盖所有可能的安全行驶方向。
- 轨迹评价函数:筛选最优行驶路径:该模块的核心功能在于通过“多维度评价函数”对所有候选轨迹进行量化评分,最终选择评分最高的轨迹作为AGV的实际行驶路径。评价函数的设计直接决定避障效果,基于“说明.doc”中“依据动态窗口评价函数选择最优轨迹移动”的描述,结合行业通用DWA算法逻辑,评价函数通常包含三大核心维度:
- 目标方向适配性:评估候选轨迹终点与AGV既定目标点的方向偏差,偏差越小则评分越高,确保AGV行驶方向始终贴合任务目标,避免因避障导致任务偏离;
- 障碍物距离安全性:计算候选轨迹上各点与周围障碍物(包括静态障碍物、其他AGV)的最小距离,距离越大则评分越高,保障AGV行驶过程中与障碍物保持安全距离;
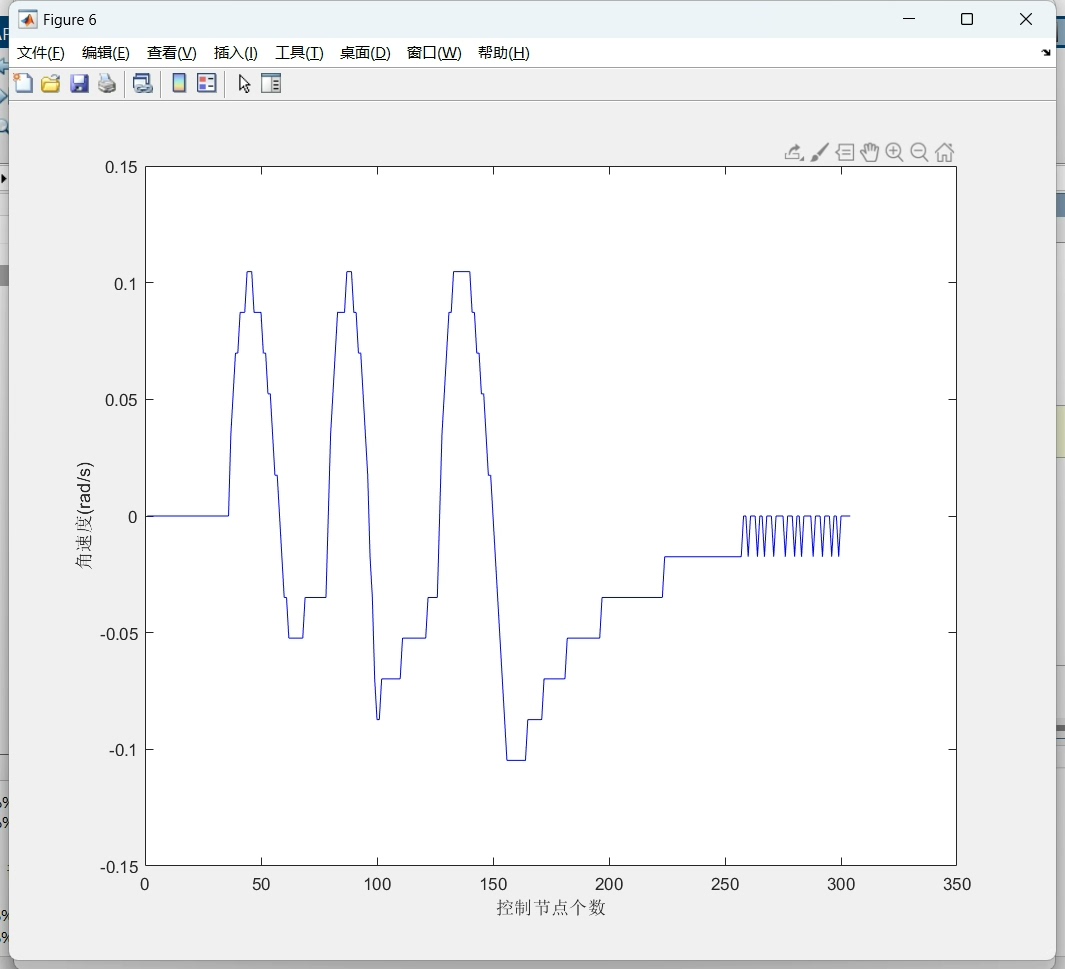
- 运动效率性:评估候选轨迹对应的线速度与角速度是否接近AGV的最优运行参数(如最大作业速度),速度越优则评分越高,确保避障过程中尽可能减少对作业效率的影响。 - 轨迹执行与动态调整:最优轨迹确定后,模块会将对应的速度、角速度参数发送至AGV的运动控制单元,驱动AGV按照规划轨迹行驶。同时,由于环境可能实时变化(如其他AGV位置变动、临时出现新障碍物),算法会以固定的时间间隔(如每0.1秒)重复执行“动态窗口构建→候选轨迹生成→轨迹评价→最优轨迹选择”的流程,实现轨迹的实时动态调整,确保AGV在整个行驶过程中始终处于安全且高效的运动状态。
(三)多AGV相遇避障控制模块:解决设备间冲突
在多AGV同时运行场景中,仅依靠个体的DWA避障无法完全规避设备间的直接相遇冲突,因此系统专门设计“多AGV相遇避障控制模块”,通过“距离+角度”双条件触发避障动作,结合优先级规则实现精准的冲突化解,具体功能如下:
- 相遇条件监测:精准识别冲突风险:模块会实时采集所有AGV的位置坐标、方向角数据,并基于这些数据计算任意两辆AGV之间的相对状态,当同时满足以下两个条件时,判定为“相遇冲突场景”,触发避障逻辑:
- 距离条件:两辆AGV之间的直线距离d≤3m。系统通过坐标计算(如基于平面直角坐标系的两点间距离公式)获取实时距离,并与预设的3m安全阈值进行比对,该阈值的设定基于AGV的制动距离、体型尺寸等参数,确保留有足够的避障反应空间;
- 角度条件:其中一辆AGV的方向角与另一辆AGV所在位置形成的夹角<100°。方向角是AGV当前行驶方向与坐标系基准方向(如X轴正方向)的夹角,系统通过三角函数计算AGV“行驶方向”与“指向另一AGV的方向”之间的夹角,当该夹角小于100°时,说明两辆AGV的运动方向存在交叉或相向趋势,存在直接碰撞风险。
上述两个条件需同时满足才会触发避障,避免单一条件(如仅距离近但方向无交叉)导致的误触发,确保避障逻辑的精准性。 - 避障动作执行:基于优先级的差异化控制:当监测到相遇冲突场景后,模块会调用AGV优先级调度模块的规则,对冲突双方的优先级进行比对,并执行差异化的控制动作:
- 高优先级AGV:保持原有行驶状态,继续按照DWA算法规划的最优轨迹行驶,无需进行减速或转向调整,确保高优先级任务的执行效率不受影响;
- 低优先级AGV:立即执行“停止移动”动作,切断运动控制信号,同时保持对周围环境(尤其是高优先级AGV位置)的实时监测。待高优先级AGV行驶至安全距离外(即两车距离d>3m,或角度条件不再满足)后,低优先级AGV重新启动DWA算法,规划后续行驶轨迹,恢复任务执行。 - 冲突状态恢复与异常处理:模块具备“冲突解除判定”功能,会持续监测停止移动的低优先级AGV与高优先级AGV的相对状态,一旦满足“安全距离”或“角度脱离冲突范围”的条件,立即向低优先级AGV发送“恢复行驶”指令。同时,为应对异常场景(如高优先级AGV停滞导致低优先级AGV长期等待),模块还内置超时检测逻辑——当低优先级AGV停止时间超过预设阈值(如30秒)时,自动触发报警信号,并向系统管理端发送异常提示,确保多AGV运行的整体稳定性。
三、系统功能运行流程
系统各模块并非独立工作,而是通过“实时数据交互+逻辑联动”形成完整的运行闭环,具体流程如下:
- 初始化阶段:系统启动后,首先加载AGV优先级配置(AGV1 > AGV2 > AGV3),并初始化各AGV的运动参数(速度、角速度范围)、DWA算法评价函数权重、相遇避障的距离与角度阈值(d=3m、夹角=100°)。同时,建立AGV状态数据采集通道,确保能实时获取各AGV的位置坐标、方向角、当前速度等核心数据。
- 实时监测与状态判断:系统以固定时间间隔(如每0.05秒)循环采集所有AGV的实时数据,一方面将数据输入DWA算法模块,为各AGV生成个体避障所需的候选轨迹与最优路径;另一方面,对任意两辆AGV的相对距离与角度进行计算,判断是否满足“相遇冲突条件”。
- 多场景分支处理:
- 无相遇冲突场景:各AGV独立执行DWA算法规划的最优轨迹,系统仅需持续监测AGV状态与环境变化,确保无新的冲突或障碍物出现;
- 存在相遇冲突场景:触发“多AGV相遇避障控制模块”,基于优先级判定结果,控制低优先级AGV停止移动,高优先级AGV继续行驶。待冲突解除后,低优先级AGV重新启动DWA算法,恢复轨迹行驶。 - 任务终止与状态重置:当某一AGV完成既定任务(如到达目标位置)后,系统会将该AGV的状态标记为“空闲”,并停止对其的避障冲突监测;若所有AGV均完成任务,系统则重置所有模块参数,等待下一轮任务指令输入,形成完整的功能运行周期。
四、功能设计的核心优势与场景适配性
- 功能优势:平衡“安全”与“效率”:系统通过“优先级调度”确保高重要性任务的高效执行,通过“DWA算法”保障AGV个体的实时避障安全,通过“距离+角度双条件避障”精准化解多AGV冲突,三者结合实现“安全无碰撞”与“任务高效率”的平衡,避免因过度避障导致的效率损耗,或因追求效率忽视安全的风险。
- 场景适配性:聚焦多AGV协同核心需求:该系统的功能设计完全针对多AGV同时作业的核心痛点——路径冲突与避障安全,所有规则(如3m距离阈值、100°角度阈值、固定优先级)均可基于实际应用场景(如AGV体型大小、行驶速度、作业空间尺寸)进行参数调整,无需大规模修改代码逻辑,可快速适配仓储分拣、车间物料搬运、智能码头装卸等不同场景的多AGV协同需求。
基于动态窗口算法的AGV仿真避障 可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物 动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。 黄色是静态障碍物,红色是可移动障碍物

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 16
16 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)