双向跳点搜索算法融合DWA算法的路径规划算法探索
双向跳点搜索算法融合DWA算法的路径规划算法,双向跳点搜索算法规划全局路径,搜索效率更高,DWA算法实现机器人的静态避障及动态避障。代码注释详细,Matlab源码,附带参考文献。在机器人路径规划领域,高效且可靠的算法至关重要。今天咱们来聊聊双向跳点搜索算法融合DWA算法的路径规划算法,这个组合可是有不少亮点。
双向跳点搜索算法融合DWA算法的路径规划算法,双向跳点搜索算法规划全局路径,搜索效率更高,DWA算法实现机器人的静态避障及动态避障。 代码注释详细,Matlab源码,附带参考文献。
在机器人路径规划领域,高效且可靠的算法至关重要。今天咱们来聊聊双向跳点搜索算法融合DWA算法的路径规划算法,这个组合可是有不少亮点。
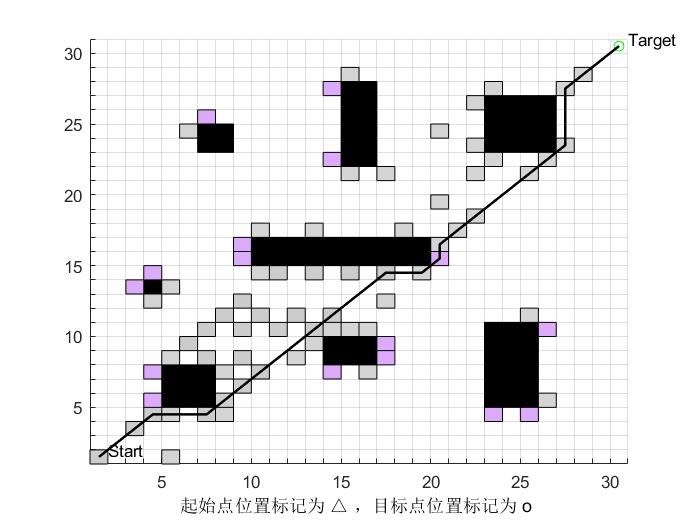
双向跳点搜索算法(Bi - Jump Point Search, BJPS)规划全局路径
双向跳点搜索算法在全局路径规划上优势显著,它能提高搜索效率。相比于传统的A*算法,它减少了不必要节点的扩展。其核心原理在于通过识别跳点,只扩展那些对路径搜索有实质性贡献的节点。
Matlab 实现代码片段及分析
% 初始化地图等参数
map = zeros(100, 100); % 创建一个100x100的地图,0表示可通行区域
start = [10, 10]; % 起始点坐标
goal = [90, 90]; % 目标点坐标
% 双向跳点搜索核心函数调用
[path, cost] = biJumpPointSearch(map, start, goal);上述代码中,我们首先初始化了一个简单的地图,标记出起始点和目标点。然后调用biJumpPointSearch函数,这个函数内部实现了双向跳点搜索的逻辑,它会返回规划出的路径path以及路径的代价cost。
参考文献
[1] Harabor, D., & Grastien, A. (2011). A* Simplified: Pattern Databases and Jump Point Search. Proceedings of the Twenty - Second International Joint Conference on Artificial Intelligence, 2027 - 2033.
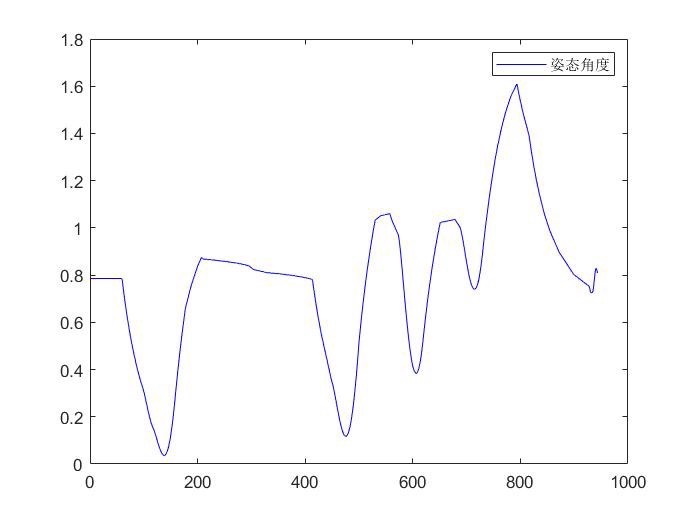
DWA算法实现机器人的静态避障及动态避障
动态窗口法(Dynamic Window Approach, DWA)则聚焦于机器人在局部环境中的避障。它根据机器人当前的速度、加速度以及周围环境信息,在速度空间中生成一个动态窗口,在这个窗口内寻找最优的速度控制指令,使机器人既能避开障碍物,又能朝着目标前进。
Matlab 实现代码片段及分析
% 机器人参数设置
robotRadius = 0.2; % 机器人半径
maxAccel = 1; % 最大加速度
maxV = 1; % 最大线速度
% 障碍物信息
obstacles = [20, 20; 50, 50; 70, 70]; % 障碍物坐标
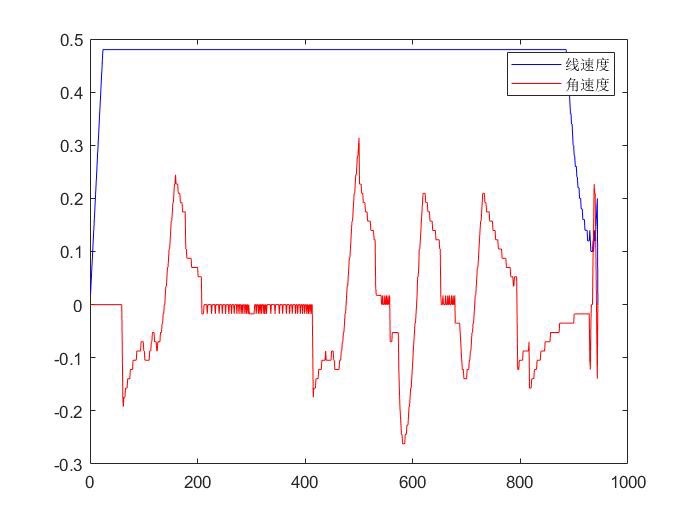
% DWA算法核心计算
[bestV, bestW] = dwaAlgorithm(robotRadius, maxAccel, maxV, obstacles, goal);这里,我们先设置了机器人的相关参数,比如半径、最大加速度和最大线速度。同时给出了一些障碍物的坐标。接着调用dwaAlgorithm函数,它会返回在当前环境下机器人应该采用的最优线速度bestV和角速度bestW,以此来避开障碍物并向目标靠近。
参考文献
[2] Fox, D., Burgard, W., & Thrun, S. (1997). The dynamic window approach to collision avoidance. IEEE Robotics & Automation Magazine, 4(1), 23 - 33.
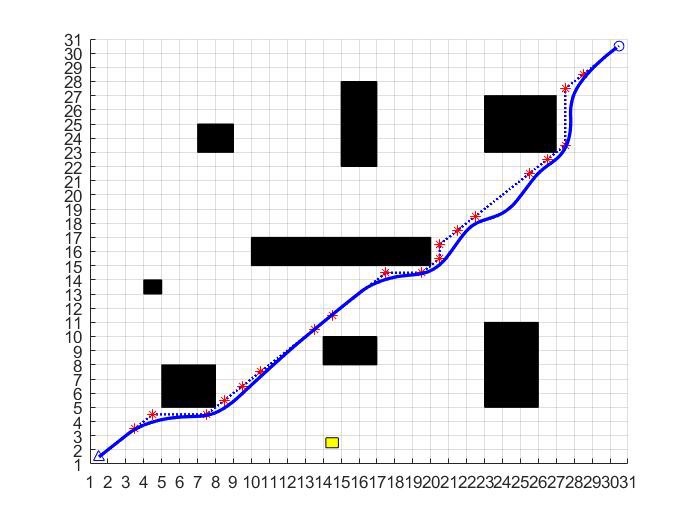
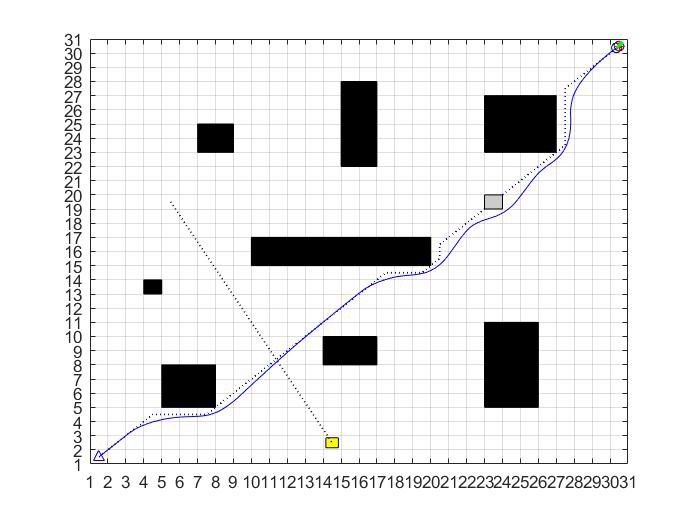
融合算法优势及整体实现思路
将双向跳点搜索算法与DWA算法融合,既能利用双向跳点搜索算法高效规划出全局路径,又能借助DWA算法让机器人在实际运动过程中灵活避开静态和动态障碍物。整体实现思路就是先用双向跳点搜索算法得到一个大致的全局路径,然后DWA算法在机器人沿着全局路径移动时,实时处理局部避障问题。
双向跳点搜索算法融合DWA算法的路径规划算法,双向跳点搜索算法规划全局路径,搜索效率更高,DWA算法实现机器人的静态避障及动态避障。 代码注释详细,Matlab源码,附带参考文献。
这种融合算法在复杂环境下的机器人路径规划中表现出色,为实际应用提供了更加可靠和高效的解决方案。希望本文能给对路径规划算法感兴趣的小伙伴一些启发和帮助。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 3
3 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)