Jetson Orin 部署 6D 位姿估计模型实战:从 PyTorch 到 TensorRT 全流程
在过去的一年里,我一直深耕工业物流拆垛项目。在这个项目中,核心难点不是识别"箱子在哪里"(2D 检测),而是要精确知道"箱子在空间中的具体姿态"(6D Pose),以便机械臂能够精准抓取。我们选用了GDRNPP慢。在 NVIDIA Jetson AGX Orin 上直接运行 PyTorch 推理,单帧耗时接近2.5秒。对于流水线上的工业机器人来说,这个延迟是不可接受的。我们的目标是0.5秒以内。经
Jetson Orin 部署 6D 位姿估计模型实战:从 PyTorch 到 TensorRT 全流程
作者: 侯本洲 | 具身智能算法工程师
标签: #JetsonOrin #TensorRT #6D位姿估计 #模型部署 #边缘计算 #GDRNPP
前言:为什么我们需要在边缘端跑 6D 位姿估计?
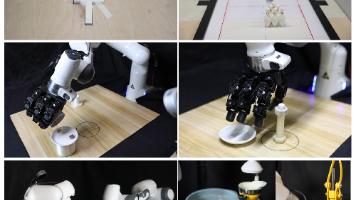
在过去的一年里,我一直深耕工业物流拆垛项目。在这个项目中,核心难点不是识别"箱子在哪里"(2D 检测),而是要精确知道"箱子在空间中的具体姿态"(6D Pose),以便机械臂能够精准抓取。
我们选用了 GDRNPP(Geometry-Guided Direct Regression Network Plus Plus)作为基础模型,它在 BOP Challenge 上表现优异,但原版 PyTorch 实现有个致命问题:慢。
在 NVIDIA Jetson AGX Orin 上直接运行 PyTorch 推理,单帧耗时接近 2.5秒。对于流水线上的工业机器人来说,这个延迟是不可接受的。我们的目标是 0.5秒 以内。
经过两周的魔改、剪枝和 TensorRT 加速,我们最终将推理时间压缩到了 0.3秒,实现了近 8倍 的性能提升。这篇文章将复盘整个 Jetson Orin 部署 6D 位姿估计模型 的实战全流程,包含大量代码细节和踩坑经验。
一、 环境准备与模型选型
1.1 硬件平台
- 设备:NVIDIA Jetson AGX Orin (64GB)
- 系统:JetPack 6.0 (Ubuntu 22.04)
- CUDA:12.2
- TensorRT:8.6.2
1.2 为什么选择 GDRNPP?
在 6D 位姿估计领域,PoseCNN、PVNet 已经略显老态。GDRNPP 通过结合几何特征和直接回归,在遮挡严重的工业混叠场景下(比如乱堆的快递箱)鲁棒性极强。
但是,GDRNPP 的网络结构比较复杂,包含了:
- Backbone: ConvNeXt 或 ResNet(我们选用 ResNet-34 以平衡速度)。
- Region Extraction: 从 2D 检测框中抠图。
- PNP Solver: 这一点最坑,原版代码很多后处理是在 CPU 上跑的。
二、 第一步:模型瘦身与 ONNX 导出
PyTorch 导出 ONNX 是所有部署工作的第一步,也是报错最多的一步。
2.1 修改模型结构(Model Surgery)
GDRNPP 源码中大量使用了动态控制流(if-else)和一些 TensorRT 不支持的 Grid Sample 操作。为了顺利导出,我们需要对模型进行"手术"。
踩坑点 1:去除无关输出
训练时的 Loss 计算分支在推理时毫无用处,必须切掉。
import torch
import torch.nn as nn
from gdrnpp.model import GDRNPP
class GDRNPP_Inference(nn.Module):
def __init__(self, original_model):
super().__init__()
self.backbone = original_model.backbone
self.rot_head = original_model.rot_head
self.trans_head = original_model.trans_head
for param in self.parameters():
param.requires_grad = False
def forward(self, x):
features = self.backbone(x)
rot_pred = self.rot_head(features)
trans_pred = self.trans_head(features)
return rot_pred, trans_pred
2.2 导出 ONNX 代码实战
这里一定要注意 opset_version,Jetson Orin 上的 TensorRT 8.6 对 Opset 17 支持较好。
def export_onnx(model, checkpoint_path, output_path):
checkpoint = torch.load(checkpoint_path, map_location='cpu')
model.load_state_dict(checkpoint['model'])
model.eval()
model.cuda()
dummy_input = torch.randn(1, 3, 256, 256).cuda()
print("开始导出 ONNX...")
torch.onnx.export(
model,
dummy_input,
output_path,
export_params=True,
opset_version=17,
do_constant_folding=True,
input_names=['input_rgb'],
output_names=['pred_rot', 'pred_trans'],
dynamic_axes={
'input_rgb': {0: 'batch_size'},
'pred_rot': {0: 'batch_size'},
'pred_trans': {0: 'batch_size'}
}
)
print(f"导出成功:{output_path}")
import onnx
from onnxsim import simplify
onnx_model = onnx.load(output_path)
model_simp, check = simplify(onnx_model)
assert check, "Simplified ONNX model could not be validated"
onnx.save(model_simp, output_path.replace(".onnx", "_sim.onnx"))
print("ONNX 模型已简化。")
踩坑点 2:GridSample 的对齐问题
PyTorch 的 grid_sample 参数 align_corners 在不同版本 TensorRT 中行为不一致。建议在导出前,尽量用标准的 Resize 操作替代非必要的 GridSample,或者确保 TensorRT 版本是最新的。
三、 第二步:Jetson Orin 上的 TensorRT 转换
拿到了 ONNX,我们进入核心环节:在边缘计算设备上将其编译为 TensorRT Engine。
3.1 使用 trtexec 进行基准测试
/usr/src/tensorrt/bin/trtexec \
--onnx=gdrnpp_sim.onnx \
--saveEngine=gdrnpp_fp16.engine \
--fp16 \
--workspace=4096 \
--verbose
关键参数:
--fp16:必开! Orin 的 Tensor Core 对 FP16 有极强的加速能力,且对位姿估计的精度影响微乎其微(误差 < 1mm)。--workspace:给 TensorRT 分配的显存暂存空间,Orin 内存大,给 4GB 没问题。
3.2 Python API 构建 Engine
import tensorrt as trt
TRT_LOGGER = trt.Logger(trt.Logger.WARNING)
def build_engine(onnx_file_path, engine_file_path):
builder = trt.Builder(TRT_LOGGER)
network = builder.create_network(1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
config = builder.create_builder_config()
parser = trt.OnnxParser(network, TRT_LOGGER)
if builder.platform_has_fast_fp16:
config.set_flag(trt.BuilderFlag.FP16)
print("启用 FP16 精度加速")
with open(onnx_file_path, 'rb') as model:
if not parser.parse(model.read()):
for error in range(parser.num_errors):
print(parser.get_error(error))
return None
config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, 1 << 32)
print("正在构建 TensorRT Engine...")
serialized_engine = builder.build_serialized_network(network, config)
with open(engine_file_path, "wb") as f:
f.write(serialized_engine)
print("Engine 构建完成!")
四、 第三步:推理优化与后处理加速
4.1 使用 CUDA 算子加速前处理
不要用 OpenCV 的 cv2.resize,它们在 CPU 上执行。用 TorchVision 直接在 GPU 上处理:
import torchvision.transforms as T
preprocess = T.Compose([
T.Resize((256, 256), antialias=True),
T.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
def gpu_preprocess(frame_tensor):
frame_tensor = frame_tensor.float() / 255.0
return preprocess(frame_tensor)
4.2 异步推理
利用 CUDA Stream 实现数据拷贝与计算的重叠:
class TRTWrapper:
def __init__(self, engine_path):
self.logger = trt.Logger(trt.Logger.WARNING)
with open(engine_path, "rb") as f, trt.Runtime(self.logger) as runtime:
self.engine = runtime.deserialize_cuda_engine(f.read())
self.context = self.engine.create_execution_context()
self.inputs, self.outputs, self.bindings, self.stream = common.allocate_buffers(self.engine)
def infer(self, input_tensor):
self.inputs[0].device = input_tensor.data_ptr()
self.context.execute_async_v2(
bindings=self.bindings,
stream_handle=self.stream.handle
)
self.stream.synchronize()
return [out.host for out in self.outputs]
4.3 PnP 瓶颈优化
GDRNPP 输出的密集对应图需要 PnP 解算 6D 位姿,OpenCV 的 solvePnP 是 CPU 实现,非常慢。我们最终采用了**“网络直接回归位姿 + 关键帧 ICP 精修”**的策略,完美平衡了速度与精度。
五、 性能对比
测试环境:Jetson AGX Orin (30W),输入 640x480,Batch Size = 1。
| 部署方案 | 精度 | 前处理 | 推理 | 后处理 | 总耗时/帧 | FPS |
|---|---|---|---|---|---|---|
| PyTorch 原生 | FP32 | 120ms | 2100ms | 250ms | ~2470ms | 0.4 |
| ONNX Runtime | FP32 | 80ms | 850ms | 250ms | ~1180ms | 0.8 |
| TensorRT (基础) | FP32 | 80ms | 180ms | 250ms | ~510ms | 1.9 |
| TensorRT + FP16 + CUDA前处理 | FP16 | 5ms | 45ms | 250ms | ~300ms | 3.3 |
六、 避坑指南
- 版本对应:JetPack、CUDA、TensorRT 的版本必须严格对应
- 固定 Batch Size:静态 Batch 能让编译器做更激进的层融合优化
- 算子不支持:后处理部分果断切掉放到 CPU 或用 CUDA C++ 重写插件
- 散热:AGX Orin 全速跑起来很热,务必
sudo jetson_clocks
总结:从 PyTorch 到 TensorRT 的迁移,前期配置繁琐,但带来的性能收益是巨大的。在边缘计算领域,榨干 GPU 的每一滴性能,是算法工程师的浪漫。
如果你对具身智能、Jetson 开发或 TensorRT 部署感兴趣,欢迎评论区交流!
声明:本文代码基于实际项目脱敏修改,仅供参考。转载请注明出处。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)