探索机械臂运动仿真:基于Matlab与机器人工具箱的奇妙之旅
机械臂运动仿真,机器人工具箱,matlab。机器人示教,工作空间,正逆运动学。轨迹画图,运动信息分析。在机器人领域,机械臂的运动仿真是一项关键的研究内容,它能帮助我们在实际制造与部署前,深入了解机械臂的性能与行为。今天,就来聊聊借助Matlab和机器人工具箱,实现机械臂运动仿真相关的那些事儿,包括机器人示教、工作空间分析、正逆运动学计算,还有轨迹画图与运动信息分析。
机械臂运动仿真,机器人工具箱,matlab。 机器人示教,工作空间,正逆运动学。 轨迹画图,运动信息分析。
在机器人领域,机械臂的运动仿真是一项关键的研究内容,它能帮助我们在实际制造与部署前,深入了解机械臂的性能与行为。今天,就来聊聊借助Matlab和机器人工具箱,实现机械臂运动仿真相关的那些事儿,包括机器人示教、工作空间分析、正逆运动学计算,还有轨迹画图与运动信息分析。
机器人工具箱与Matlab的强强联合
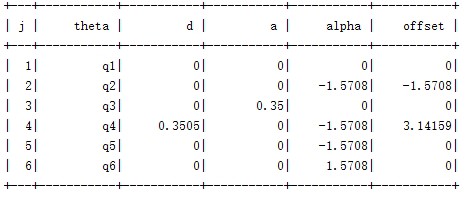
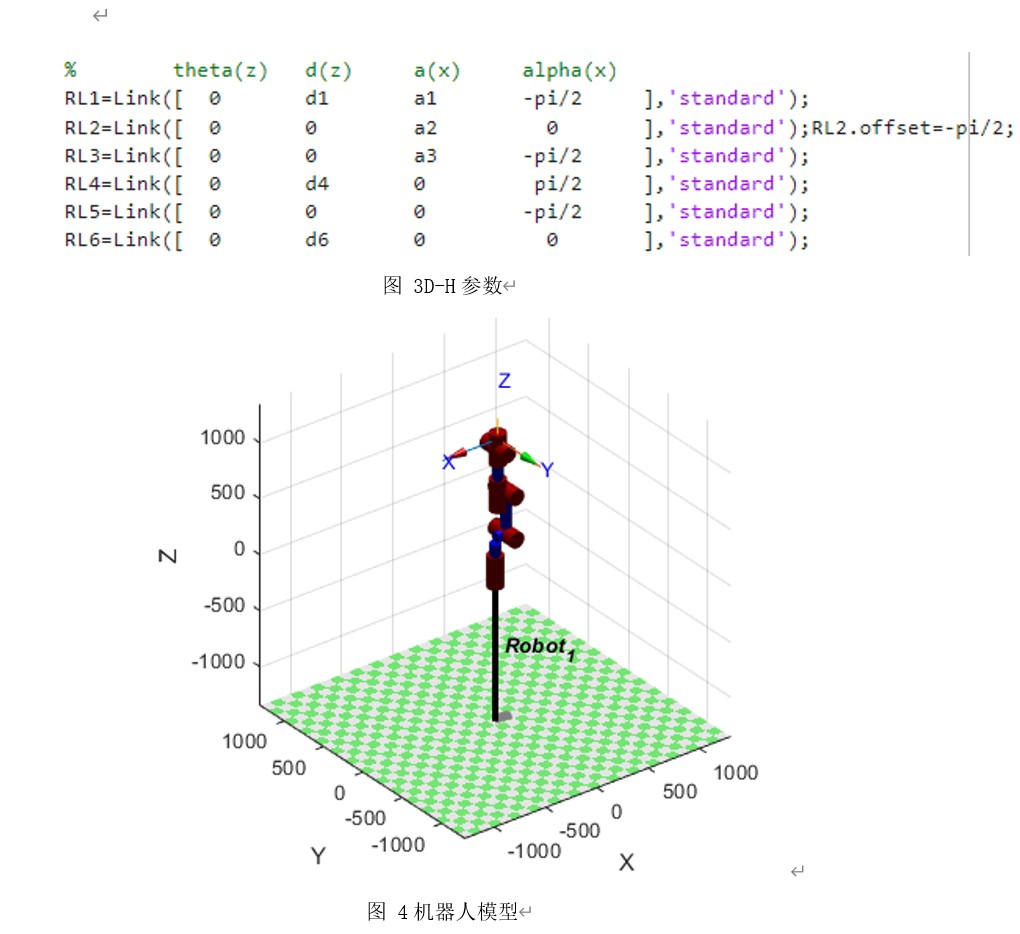
Matlab作为强大的数学计算与编程平台,搭配机器人工具箱,为机械臂运动仿真提供了绝佳环境。机器人工具箱里包含了众多预定义的函数和模型,大大简化了开发流程。比如,要创建一个简单的2自由度平面机械臂模型,可以这样写代码:
% 创建2自由度平面机械臂
L(1) = Link('d', 0, 'a', 1, 'alpha', 0);
L(2) = Link('d', 0, 'a', 1, 'alpha', 0);
robot = SerialLink(L, 'name', '2DOF Planar Robot');在这段代码中,Link函数用于定义每个关节的参数,d表示关节偏移,a是连杆长度,alpha为扭转角。通过将这些Link组合成SerialLink对象,就构建出了我们的机械臂模型。
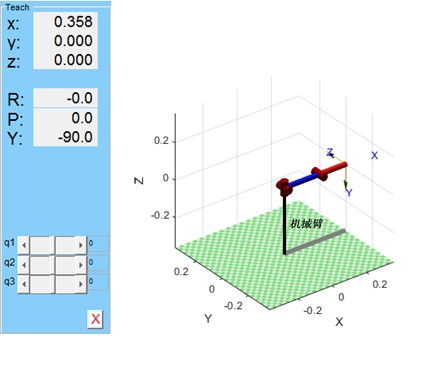
机器人示教与工作空间
机器人示教是确定机械臂如何在空间中移动以完成任务的过程。而工作空间则定义了机械臂末端执行器能够到达的空间范围。
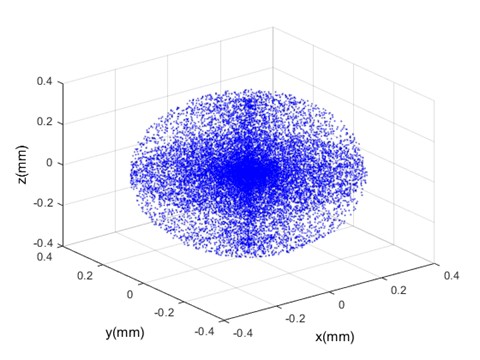
计算机械臂的工作空间,可以使用机器人工具箱中的workspace函数。
% 计算并绘制工作空间
ws = robot.workspace('n', 1000);
figure;
plot3(ws(:,1), ws(:,2), ws(:,3), '.');
xlabel('X (m)');
ylabel('Y (m)');
zlabel('Z (m)');
title('2DOF Planar Robot Workspace');上述代码先通过workspace函数计算工作空间,参数'n'指定了采样点数。然后利用plot3函数将工作空间在三维坐标系中绘制出来,这样就能直观看到机械臂的可达范围。
正逆运动学
正运动学是根据关节角度计算末端执行器位置和姿态的过程,逆运动学则相反,是根据期望的末端位置和姿态求解关节角度。
在机器人工具箱里,正运动学计算非常简单:
% 正运动学示例
q = [pi/4 pi/4]; % 设定关节角度
T = robot.fkine(q); % 计算末端执行器位姿
disp(T);这里设置了两个关节角度q,通过fkine函数计算出末端执行器的位姿矩阵T并显示。
机械臂运动仿真,机器人工具箱,matlab。 机器人示教,工作空间,正逆运动学。 轨迹画图,运动信息分析。
逆运动学相对复杂一些,因为可能存在多组解。以求解到达特定位置的关节角度为例:
% 逆运动学示例
x = 1.5; y = 1; z = 0; % 期望的末端位置
T0 = transl(x, y, z); % 创建期望的位姿矩阵
q_sol = robot.ikine(T0); % 求解逆运动学
disp(q_sol);transl函数创建了期望的位姿矩阵T0,ikine函数尝试求解出能使机械臂末端到达该位置的关节角度q_sol。
轨迹画图与运动信息分析
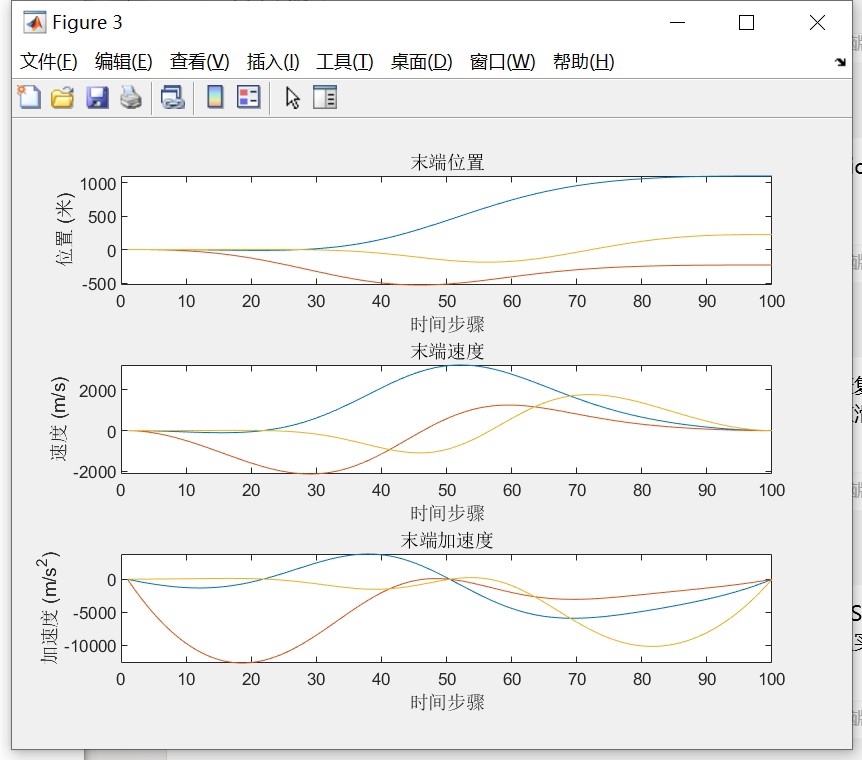
轨迹画图能直观展示机械臂的运动路径,运动信息分析则帮助我们了解速度、加速度等关键参数。
假设要让机械臂沿着一条直线轨迹运动,可以这样实现:
% 直线轨迹规划与绘制
x_start = 0; y_start = 0; z_start = 0;
x_end = 2; y_end = 2; z_end = 0;
t = 0:0.1:1; % 时间向量
x = interp1([0 1], [x_start x_end], t);
y = interp1([0 1], [y_start y_end], t);
z = interp1([0 1], [z_start z_end], t);
figure;
hold on;
for i = 1:length(t)
T = transl(x(i), y(i), z(i));
q = robot.ikine(T);
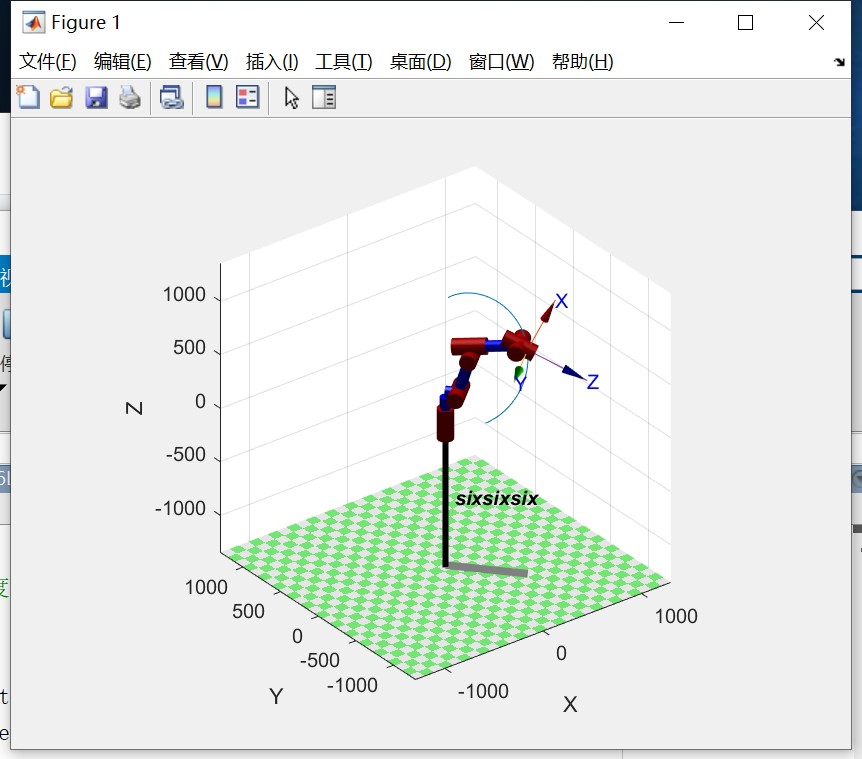
robot.plot(q);
drawnow;
end
hold off;这段代码首先定义了直线轨迹的起点和终点,通过interp1函数在时间向量t上进行线性插值得到各个时刻的位置。然后在循环中,根据每个位置求解逆运动学得到关节角度,并使用plot函数绘制机械臂在该时刻的形态,从而形成动态的轨迹展示。
要分析运动信息,比如关节速度,可以在轨迹规划的基础上添加如下代码:
% 关节速度分析
q_dot = zeros(size(q));
for i = 2:length(t)
q_dot(:,i) = (q(:,i) - q(:,i - 1)) / (t(i) - t(i - 1));
end
figure;
for j = 1:robot.n
subplot(robot.n, 1, j);
plot(t(2:end), q_dot(j, 2:end));
title(['Joint ', num2str(j),'Velocity']);
xlabel('Time (s)');
ylabel('Velocity (rad/s)');
end这里通过前后时刻关节角度的差值除以时间间隔,计算出关节速度q_dot,并绘制出每个关节速度随时间变化的曲线,方便我们分析机械臂运动过程中的速度特性。
通过Matlab和机器人工具箱,我们可以全面深入地对机械臂运动进行仿真、分析,为实际机器人的设计与控制提供有力支持。希望这篇博文能给对机械臂运动仿真感兴趣的小伙伴们一些启发!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)