MATLAB中Stewart平台的奇妙探索:从运动学到PID控制仿真
MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学 动力学在机器人领域,并联机器人以其独特的结构和优势备受关注,Stewart平台就是其中的典型代表。今天咱就唠唠在MATLAB环境下,如何对Stewart平台开展从运动学、动力学到PID控制仿真的一系列操作,还会用到Simulink和Simscape这些超好用的工具。
MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学 动力学
在机器人领域,并联机器人以其独特的结构和优势备受关注,Stewart平台就是其中的典型代表。今天咱就唠唠在MATLAB环境下,如何对Stewart平台开展从运动学、动力学到PID控制仿真的一系列操作,还会用到Simulink和Simscape这些超好用的工具。
一、Stewart平台运动学
Stewart平台由上下两个平台通过六根可伸缩杆连接而成。要对其进行控制,首先得搞清楚运动学关系,也就是已知各伸缩杆的长度,如何求解平台的位姿(位置和姿态),这叫逆运动学;反之,已知平台位姿求各伸缩杆长度,就是正运动学。
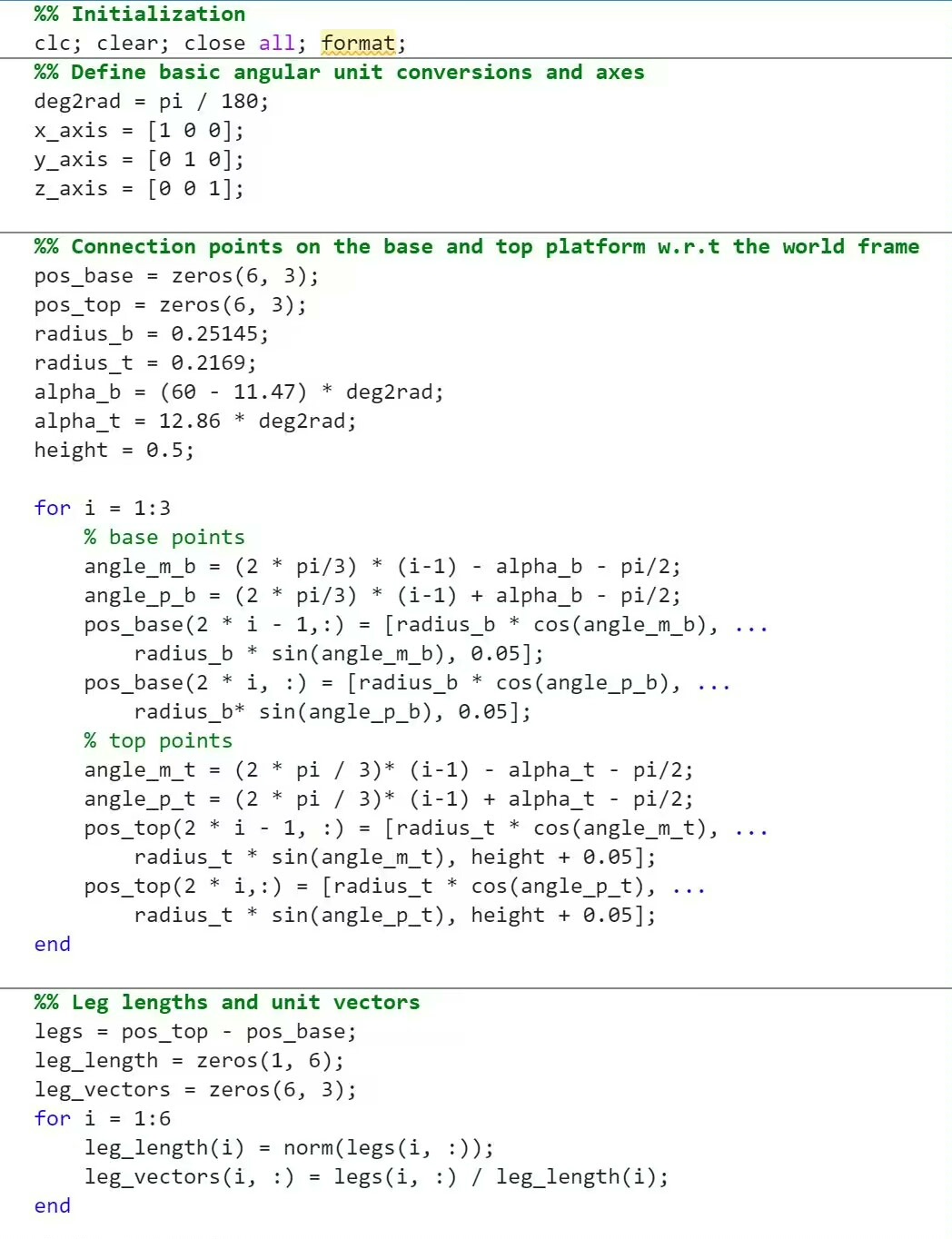
以逆运动学为例,假设Stewart平台上下平台的几何参数已知,通过建立坐标系,利用向量关系和几何约束,可以推导出逆运动学方程。在MATLAB里,代码实现大概像这样:
% 定义Stewart平台几何参数
upper_radius = 0.2;
lower_radius = 0.3;
platform_height = 0.5;
% 已知平台位姿(示例)
x = 0.1;
y = 0.1;
z = 0.6;
roll = 0;
pitch = 0;
yaw = 0;
% 计算逆运动学
T = eul2tform([roll,pitch,yaw],'ZYX');
T(1,4) = x;
T(2,4) = y;
T(3,4) = z;
upper_points = [upper_radius*[cos(0:60:300);sin(0:60:300)];ones(1,6)];
lower_points = [lower_radius*[cos(0:60:300);sin(0:60:300)];zeros(1,6)];
upper_points_transformed = T * upper_points;
lengths = zeros(1,6);
for i = 1:6
lengths(i) = norm(upper_points_transformed(:,i) - lower_points(:,i));
end
disp(lengths);这段代码首先定义了Stewart平台上下平台的半径以及平台高度等几何参数。接着设定了平台的一个示例位姿(包括位置和姿态)。通过欧拉角转齐次变换矩阵得到平台的位姿变换矩阵T ,对平台上表面的点进行变换。最后通过计算上下对应点之间的距离,得到六根伸缩杆的长度。
二、Stewart平台动力学
动力学研究的是力与运动之间的关系,对于Stewart平台来说,就是要分析施加在伸缩杆上的力如何影响平台的运动。一般基于拉格朗日方程来建立动力学模型。拉格朗日函数定义为系统动能减去势能,通过对拉格朗日函数求导可以得到系统的动力学方程。
在MATLAB中,虽然直接手推动力学方程并编程实现较为复杂,但借助符号运算工具箱可以简化这个过程。
syms x y z roll pitch yaw real
syms q1 q2 q3 q4 q5 q6 real
syms u1 u2 u3 u4 u5 u6 real
% 定义几何参数
a = 0.2;
b = 0.3;
h = 0.5;
% 运动学关系推导(这里简化,实际更复杂)
% ......
% 动能和势能计算
% ......
L = kinetic_energy - potential_energy;
eqns = eulerLagrange(L, [q1,q2,q3,q4,q5,q6], [u1,u2,u3,u4,u5,u6]);这段代码先定义了符号变量,包括平台的位姿变量、伸缩杆长度变量以及输入力变量。接着设定几何参数,之后就是通过符号运算来推导运动学关系,计算动能和势能,进而构建拉格朗日函数L ,最后通过eulerLagrange函数得到系统的动力学方程eqns。
三、基于Simulink和Simscape的PID控制仿真
有了运动学和动力学基础,就可以进行控制仿真了。Simulink是MATLAB里强大的动态系统建模和仿真工具,Simscape则为多领域物理系统建模提供了便利。
MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学 动力学
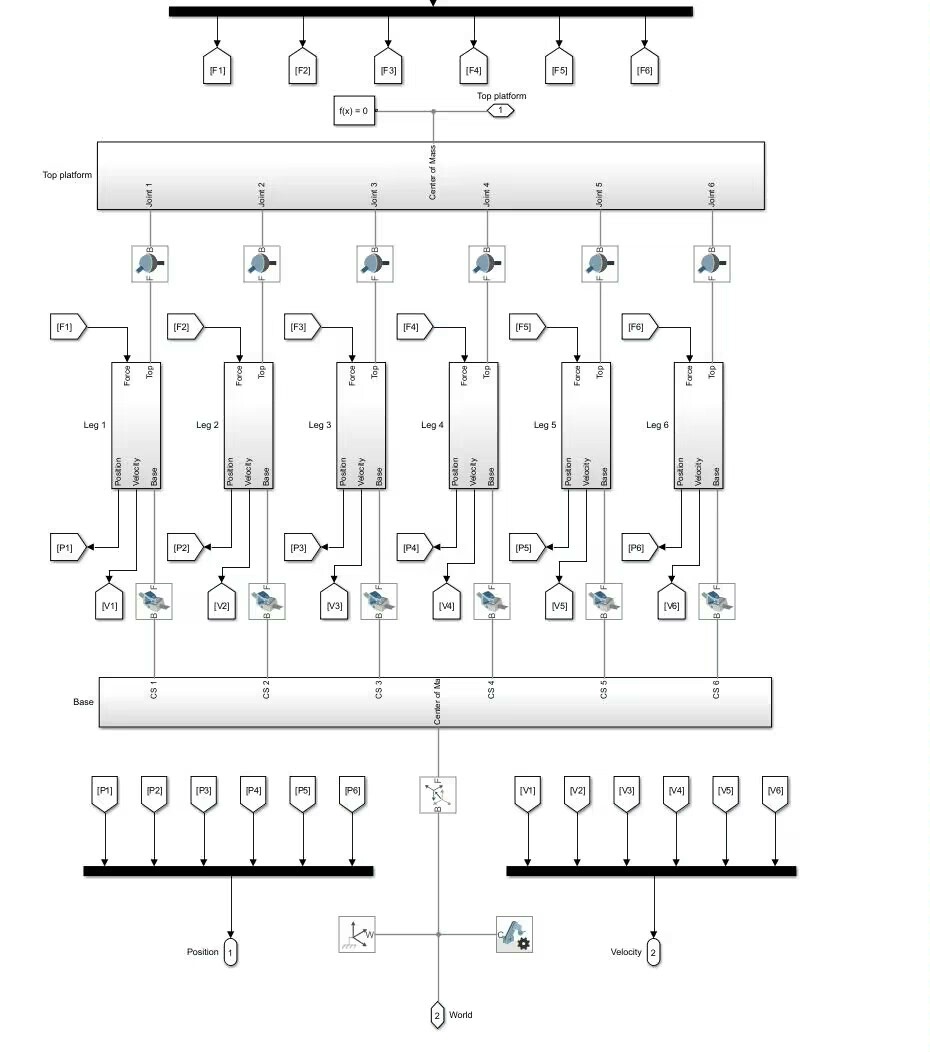
首先在Simulink里搭建Stewart平台的模型框架,利用Simscape中的机械库来构建平台的物理结构。将前面推导的运动学和动力学关系通过MATLAB Function模块嵌入到模型中。
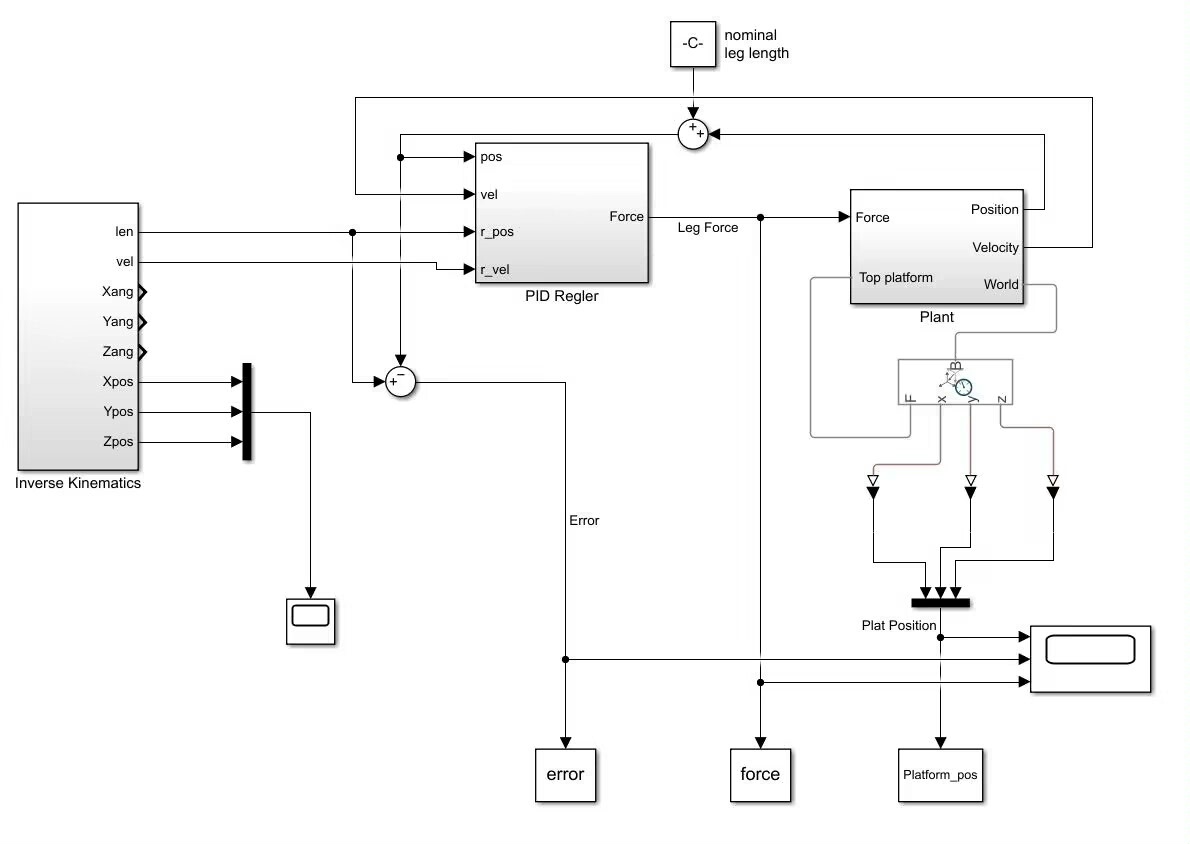
对于PID控制,PID控制器的作用是根据平台实际位姿与期望位姿的误差,调整伸缩杆的输入力,使平台尽可能接近期望位姿。在Simulink里,PID控制器可以直接从控制模块库中拖入。
% PID参数设定示例
Kp = 10;
Ki = 0.1;
Kd = 1;
% 误差计算
error = desired_pose - current_pose;
% PID控制律
control_signal = Kp*error + Ki*cumsum(error) + Kd*d(error);这里简单设定了PID的比例、积分、微分系数Kp 、Ki 、Kd 。通过计算期望位姿与当前位姿的误差error,依据PID控制律计算出控制信号control_signal,这个信号最终会作用到Stewart平台的伸缩杆上,实现对平台位姿的控制。
在整个仿真过程中,通过不断调整PID参数以及观察平台的运动响应,可以优化控制效果,让Stewart平台更精准地跟踪期望轨迹。
通过在MATLAB中对Stewart平台进行运动学、动力学分析以及PID控制仿真,我们能够深入了解并联机器人的工作原理,并且为实际应用中的控制策略优化提供有力的支持。无论是搞科研还是做工程实践,这些知识和技能都相当实用。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)