开源发布 | 从青龙Nano到青龙Mini:共建开源生态,首次亮相产教融合场景
随着具身智能逐步进入工程化阶段,强化学习被越来越多的技术团队视为连接算法能力与机器人实机行为的重要技术路径,而随着实际应用不断展开,机器人平台本身的设计方式对强化学习能否顺利展开的影响无法让人忽视:过于复杂的系统往往放大训练难度,而过于简化的结构又难以承载真实的动力学问题。国地中心 CTO 邢伯阳介绍,这种能够陪伴开发者从第一次成功行走,到逐步探索更复杂行为的连续性,使青龙Mini成为一个适合长期
随着具身智能逐步进入工程化阶段,强化学习被越来越多的技术团队视为连接算法能力与机器人实机行为的重要技术路径,而随着实际应用不断展开,机器人平台本身的设计方式对强化学习能否顺利展开的影响无法让人忽视:过于复杂的系统往往放大训练难度,而过于简化的结构又难以承载真实的动力学问题。
小型人形机器人由此成为一个重要选择:它们具备完整的人形运动结构,同时在体量与成本上保持可控,更适合进行长周期、可复现的学习与验证。青龙 mini 正是在这样的技术环境中推出的,它围绕强化学习这一核心方法展开设计,希望在仿真训练、策略迁移与真实运行之间,形成一条清晰且可实践的技术路径。
青龙 Mini 的定位与形态
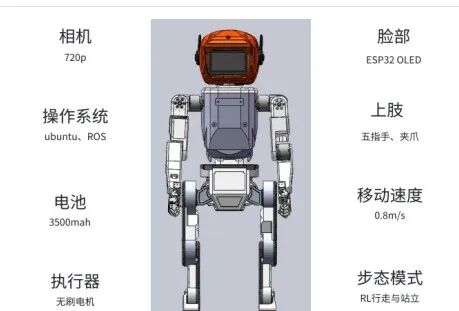
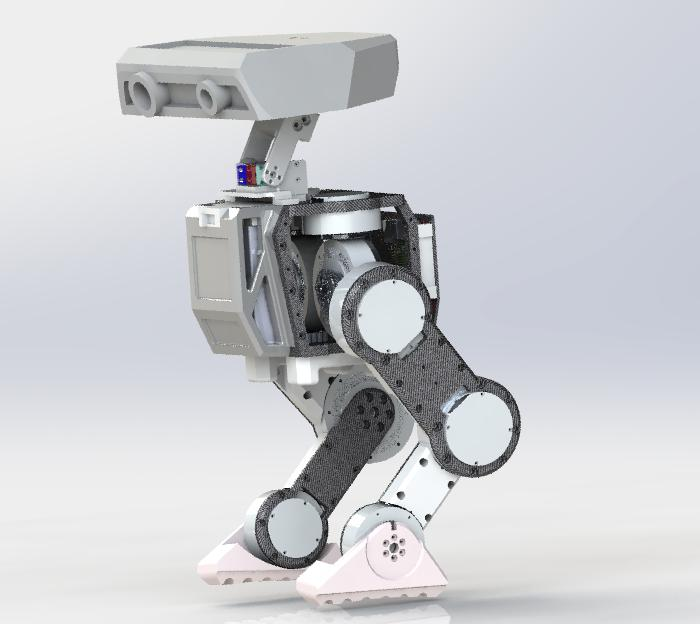
青龙Mini 是一款围绕强化学习运动控制设计的小型人形机器人,整机高度约 0.8 米、重量控制在 15–18 公斤区间,这一尺度在保证完整人形动力学特征的同时,将系统惯性与实验风险控制在可反复训练的范围内,使其能够承受长时间运行与多轮策略迭代。

整机在自由度配置上覆盖了人形运动的核心需求,腿部设置 10 个自由度以支撑行走过程中的支撑、摆动与姿态调整,双臂提供 8 个自由度用于基础操作与上肢协同,夹爪额外配置 2 个自由度,腰部与脖子各 1 个自由度,使机器人在运动表达与交互过程中具备连续而自然的姿态变化能力。
基于这一结构设计,青龙Mini既能够作为强化学习与运动控制的实验平台,用于训练与验证学习型策略在真实动力学条件下的表现,也能够通过模块化与定制化扩展,发展为具备交互属性的智能移动终端,适配商业展示、科普演示以及定制化应用等多种使用场景。
从青龙 Nano 到青龙 Mini
青龙Mini 并非从零起步的独立项目,而是由青龙 Nano在强化学习方向上的一次系统性演变。
在早期的青龙Nano阶段,平台更多承担的是小型人形机器人通用验证载体的角色:关注基础运动能力、硬件可靠性以及控制系统的可运行性,适合进行规则控制、基础算法验证和教学展示。但在实际使用过程中,团队逐步发现,当强化学习被真正引入到具身系统中时,对平台提出了新的要求——动力学一致性、可重复训练能力、以及仿真到实物迁移的稳定性,开始成为比“功能完整”更关键的指标。
青龙Nano
在这一背景下,青龙Mini更像是作为青龙Nano的一次“定向演进”,除了简单的尺寸调整及外观变化之外,还围绕强化学习这一核心方法对平台进行了重构:
在结构层面,青龙mini的关节扭矩分布、自由度配置和整机尺度都进行了重新权衡,使其更贴近强化学习中常见的人形动力学模型;
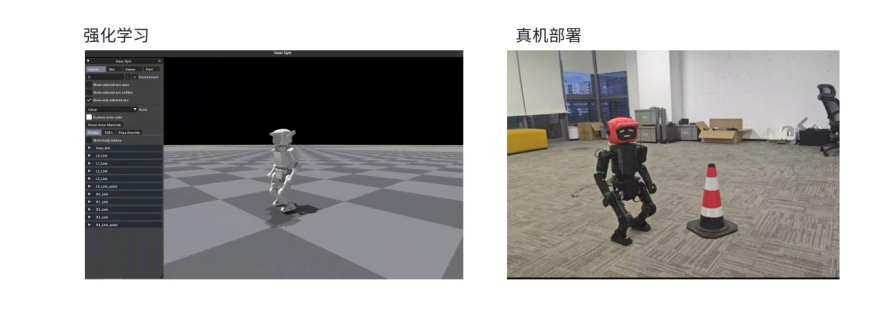
在控制与系统层面,青龙mini 进一步明确了“仿真优先、策略迁移、实机验证”的技术路线,使其从一开始就服务于学习型控制的闭环。
青龙 Mini 首次亮相产教融合场景
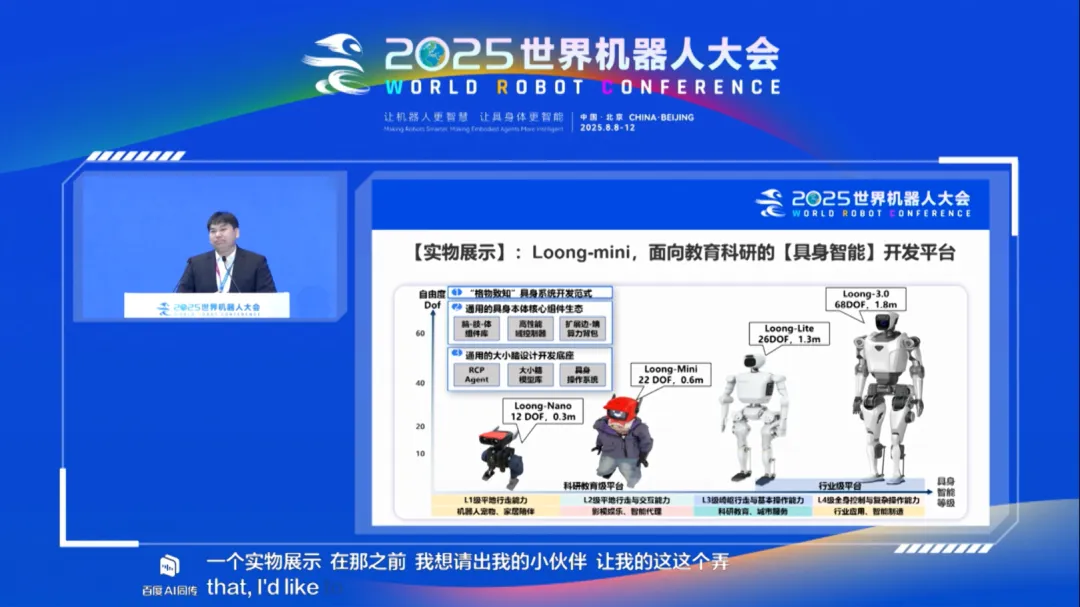
2 月 4 日,农历立春,围绕具身智能技术开源与教育应用落地,一场主题为“春启具身·智教中原”的发布会成功举行。在发布会上,围绕具身智能在教育与科研场景中的应用路径,OpenLoong 开源社区正式对外介绍了面向教学与科研的开源人形机器人项目——青龙 Mini,并同步发布了具身智能专业建设相关方案,标志着具身智能技术正在以更加开放、可复用的方式,进入人才培养与教学实践体系。
会上,四方正式宣布成立“河南具身智能产教融合联合体”,重磅发布了面向教育场景的“青龙Mini”人形机器人及《具身智能专业建设方案》。作为联合体成立后的首份“见面礼”,备受瞩目的“青龙Mini”人形机器人在发布会现场完成了河南首秀,在演示环节,“青龙Mini”展示了稳定的行走能力、语音交互能力及人机交互动作,赢得了现场嘉宾的阵阵掌声。

作为联合体中的技术策源地,国家地方共建人形机器人创新中心(以下简称“国地中心”)不仅提供“大脑、小脑、本体”的全栈技术支持,更通过开源开放的模式,依托 OpenLoong 开源社区将经过实战验证的机器人运控框架、算法模块向外开源。国地中心 CTO 邢伯阳介绍,青龙Mini是一款专为教育和科研场景打造的通用人形机器人平台,继承了全尺寸人形机器人“青龙”的开源基因,拥有开放的控制接口和强大的运动性能,能够完美适配高校的教学实训与二次开发需求。

在 OpenLoong 开源社区看来,青龙Mini并不仅是一款面向教学的硬件平台,更是一个围绕具身智能教学、科研与创新实践展开的开源协作载体,高校教师、科研人员与学生,可以基于统一的平台进行课程设计、实验开发与算法验证,在真实人形机器人系统上完成从理解原理到动手实践的完整闭环。社区希望通过“技术开源 + 教学共建”的模式,为高校与科研机构提供一套可持续演进的具身智能实践平台,降低教学与科研的入门门槛,加速技术在真实场景中的验证与迭代。
一个值得新手坚持的平台
对于刚接触强化学习的开发者而言,往往难以忽略训练结果缺乏稳定反馈这一问题带来的挫败感,仿真中能够稳定运行的策略在机器人实机上频繁失效,使开发者难以判断问题究竟源于模型假设、奖励设计,还是系统本身的物理限制。
青龙Mini 在设计阶段就将这一现实纳入考虑,通过相对克制的整机尺度、明确的关节能力分布以及可复现的动力学模型,使新手在训练过程中能够更快建立“因果感”。
在学习初期,开发者可以直接从仿真环境入手,围绕行走稳定性这一单一目标展开训练,策略在收敛或发散过程中的变化,能够同步体现在状态曲线与实际行为上,使每一次训练结果都具备可回溯、可验证的意义。随着训练不断推进,动力学偏差、执行器能力边界以及传感器噪声等真实工程问题会逐步显现,这些问题并不会以突发形式打断学习节奏,而是随着能力提升自然进入视野,使开发者能够在连续的难度变化中理解系统复杂性的来源。
在策略迁移阶段,青龙Mini提供了已经验证过的仿真到实物路径,开发者可以在既有流程基础上逐步替换或调整局部模块,并通过实机表现直接观察改动带来的影响,使整个学习过程始终保持在可掌控范围内。
这种能够陪伴开发者从第一次成功行走,到逐步探索更复杂行为的连续性,使青龙Mini成为一个适合长期投入的学习平台,也让强化学习在具身系统中的实践,从充满不确定性的尝试,逐渐转变为可以持续积累的工程经验。
开源路径与社区支持
项目同步开放了完整的开发教程与社区支持资源,内容覆盖从仿真建模、强化学习训练到策略迁移与实物部署的完整流程,开发者可以直接获取经过验证的模型、代码与实践经验,也可以对训练中的关键环节进行对比调整。随着更多实践被反复验证并在社区中共享,青龙Mini便不再只是一个可运行的平台,而逐渐成为一套可被共同完善的工程经验集合。
社区也将持续围绕开源项目拓展课程资源、示例工程与应用案例,吸引更多开发者、教育工作者与研究团队参与共建,在下载、使用与复现的基础上展开进一步探索,并通过持续交流推动平台能力与实践路径的不断扩展。欢迎加入 OpenLoong 开源社区,与更多同行一起,在真实机器人平台上推进具身智能的持续探索与落地。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 6
6 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)