ABB机器人与西门子博图V16基于Profinet的通讯配置及外部启动实现
abb机器人外部启动,博图v16,FB功能块,送西门子与abb机器人profinet通讯配置说明,程序含gsd,需要实体机器人有888-2或者888-3选项,否则只能硬接线了,一般机器人自带板卡是dsqc1030,或者dsqc652。在自动化控制领域,ABB机器人与西门子设备的协同工作十分常见。今天就来聊聊如何实现ABB机器人与博图V16通过Profinet通讯,并实现机器人的外部启动。
abb机器人外部启动,博图v16,FB功能块,送西门子与abb机器人profinet通讯配置说明,程序含gsd,需要实体机器人有888-2或者888-3选项,否则只能硬接线了,一般机器人自带板卡是dsqc1030,或者dsqc652。
在自动化控制领域,ABB机器人与西门子设备的协同工作十分常见。今天就来聊聊如何实现ABB机器人与博图V16通过Profinet通讯,并实现机器人的外部启动。
一、硬件及配置要求
首先,实体机器人需要具备888 - 2或者888 - 3选项,如果没有这两个选项,那就只能采用硬接线方式了。一般情况下,机器人自带的板卡为dsqc1030或者dsqc652 。这些板卡在通讯过程中起着关键作用。
二、GSD文件准备
要实现Profinet通讯,GSD文件是必不可少的。GSD文件包含了从站设备(这里就是ABB机器人)的设备描述信息,让主站(西门子PLC,通过博图V16编程)能够识别并与之通讯。我们需要将ABB机器人对应的GSD文件导入到博图V16中。假设已经获取到了合适的GSD文件,在博图V16中,通过“选项” - “管理通用站描述文件(GSD)”路径,将GSD文件导入。
三、博图V16中配置Profinet通讯
- 创建新项目:打开博图V16,新建一个项目。
- 添加PLC站点:在项目树中,右键点击“添加新设备”,选择合适的西门子PLC型号。
- 添加ABB机器人从站:在网络视图中,点击“添加新设备”,选择从站列表中的ABB机器人(这时候刚才导入的GSD文件起作用了,才能正确识别机器人设备)。然后,通过Profinet网线连接将主站PLC与从站ABB机器人在网络视图中进行连接。
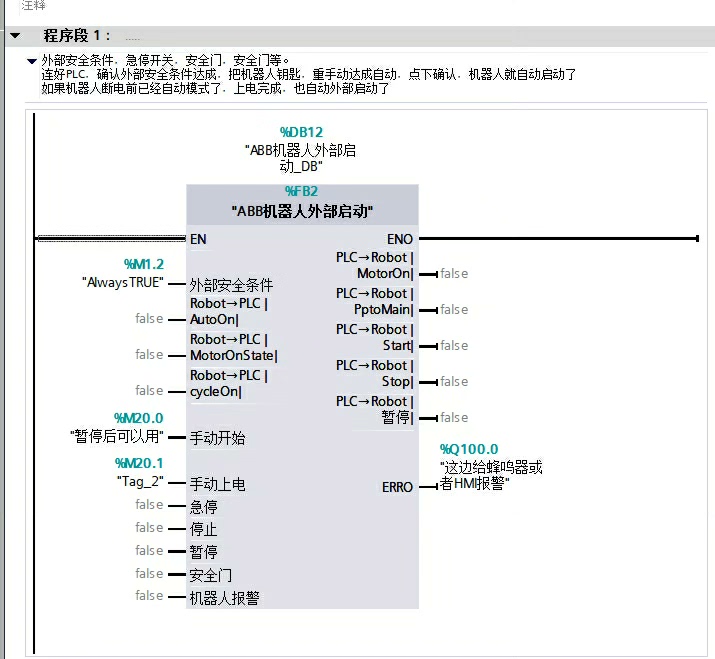
四、FB功能块编写
在博图V16中,我们可以通过编写FB功能块来实现对ABB机器人的控制,包括外部启动。以下是一个简单的FB功能块示例(以SCL语言为例):
FUNCTION_BLOCK FB_ABB_Robot_Control
VAR_INPUT
Start_Robot : BOOL; // 启动机器人信号
END_VAR
VAR_OUTPUT
Robot_Status : WORD; // 机器人状态反馈
END_VAR
VAR
// 一些内部变量声明
Temp_Status : WORD;
BEGIN
IF Start_Robot THEN
// 这里模拟发送启动命令给机器人
// 实际可能需要通过Profinet特定的通讯指令发送
Temp_Status := 16#01; // 假设16#01代表启动成功反馈
ELSE
Temp_Status := 16#00; // 未启动状态
END_IF;
Robot_Status := Temp_Status;
END_FUNCTION_BLOCK在这个功能块中,StartRobot 是输入参数,当它为 TRUE 时,我们模拟发送启动命令给机器人,并将反馈状态存储在 TempStatus 中,最后通过 Robot_Status 输出给主程序。当然,实际应用中,发送启动命令的部分需要使用Profinet通讯相关的指令与机器人进行交互,这里只是简单模拟。
五、ABB机器人端设置
在ABB机器人端,需要确保Profinet通讯相关参数设置正确,例如IP地址要与博图V16中配置的一致。同时,还需要编写相应的程序来接收来自博图V16的控制信号,并实现外部启动功能。由于ABB机器人编程有自己的一套语言(如RAPID),这里简单说下思路。
MODULE MainModule
PROC main()
VAR bool start_signal;
WHILE TRUE DO
// 这里假设通过Profinet通讯获取到启动信号存到start_signal
start_signal := Get_Profinet_Signal();
IF start_signal THEN
Start_Robot(); // 调用启动机器人的程序
END IF
WaitTime 0.1;
END WHILE
ENDPROC
ENDMODULE上述RAPID代码中,通过一个循环不断检查从Profinet获取到的启动信号 startsignal ,如果信号为真,则调用 StartRobot() 程序启动机器人。实际编写中,GetProfinetSignal() 函数需要根据具体通讯配置实现获取来自博图V16的信号。
abb机器人外部启动,博图v16,FB功能块,送西门子与abb机器人profinet通讯配置说明,程序含gsd,需要实体机器人有888-2或者888-3选项,否则只能硬接线了,一般机器人自带板卡是dsqc1030,或者dsqc652。
通过以上步骤,基本可以实现ABB机器人与西门子博图V16基于Profinet的通讯以及机器人的外部启动功能。不过在实际项目中,还需要根据具体需求进行详细的调试和优化。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 3
3 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)