点云配准在人形机器人中的应用:ICP算法(1)
摘要:点云配准是将不同视角或时间的点云数据对齐到同一坐标系的过程,核心是寻找最优刚体变换(旋转矩阵R和平移向量t)。经典ICP算法通过迭代最近点匹配和SVD分解实现,但易陷入局部最优且对初始位姿敏感。改进方法包括Point-to-Plane ICP、鲁棒损失函数和特征描述子匹配。全局配准算法(如RANSAC)和深度学习方法(如端到端网络)进一步提升了性能。ICP在人形机器人中应用广泛,但面临初始位

人形机器人核心模块
第一节:点云配准概述
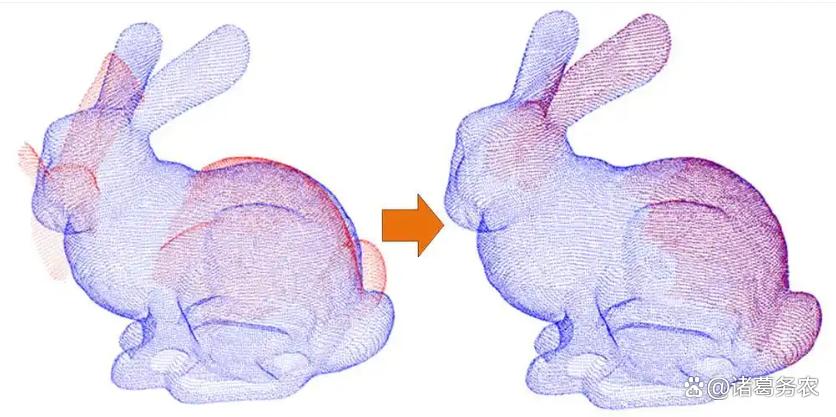
点云配准是將不同视角、不同时间下获取的多个点云数据集变换到同一个统一坐标系下的过程。
一、核心目标
找到一个最优的刚体变换(旋转矩阵 R 和平移向量 t),使得两个点云之间的对应点距离之和最小。
二、经典算法:ICP
迭代最近点 是点云配准中最著名、最基础的算法。
(一)核心思想:迭代地执行两个步骤,直至收敛:
1. 数据关联:
为源点云中的每个点,在目标点云中寻找最近邻点,作为对应点。
2. 变换估计:
基于这些(不可靠的)对应点对,计算一个使得对应点距离之和最小的最优刚体变换 (R, t)。这通常通过奇异值分解 来求解。
3. 将计算得到的变换应用于整个源点云。
4. 重复步骤1-3,直到变换参数的变化小于某个阈值或达到最大迭代次数。
(二)优缺点:
优点:概念简单,实现容易。
缺点:严重依赖初始位姿,如果两个点云初始角度偏差过大,极易陷入局部最优解;寻找最近邻计算量大;对 outlier(错误对应点)非常敏感。
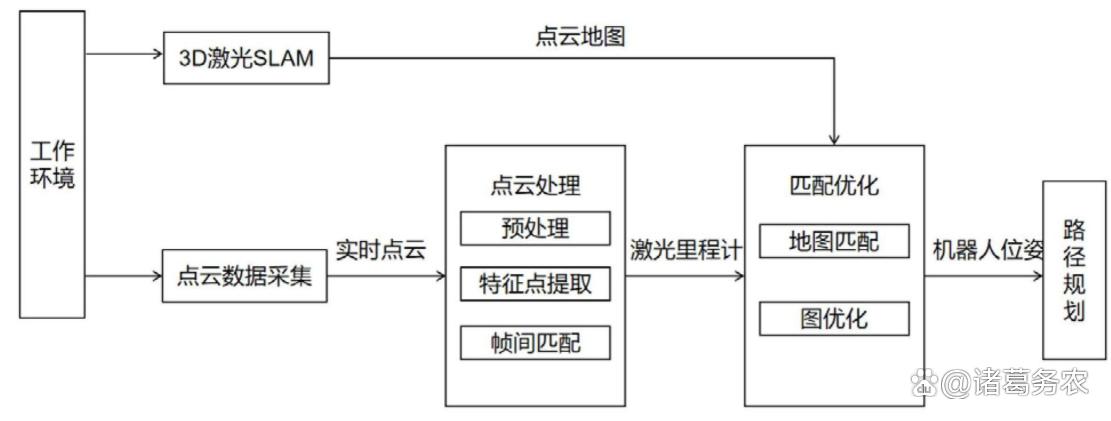
基于3D点云配准的定位方法
三、ICP的改进与变种
为了解决ICP的缺陷,研究者提出了大量改进方案:
-
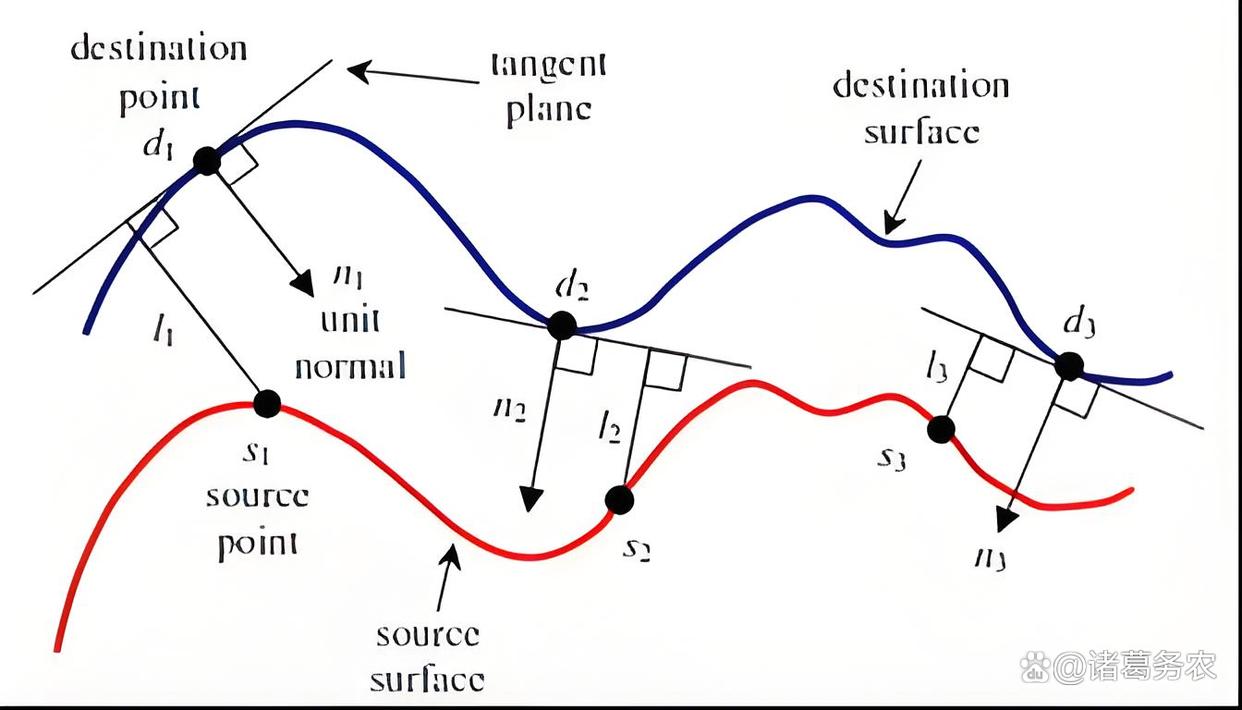
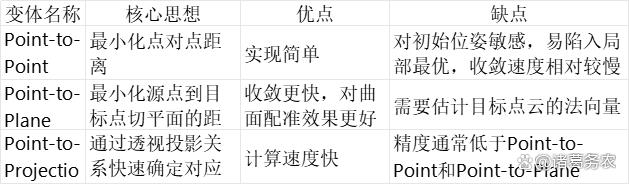
Point-to-Plane ICP:不是最小化点到点的距离,而是最小化点到目标点切平面的距离。这通常能更快、更精确地收敛,尤其对曲面物体。
-
稳健损失函数:使用Huber损失等代替平方损失,减少 outlier 的影响。
-
采样策略:不使用所有点,而是采用随机采样、法向量空间采样等策略来加速和提高精度。
-
特征描述子:在迭代之前,先提取点云的局部特征(如FPFH、SHOT),基于特征匹配来寻找更可靠的点对应关系,从而为ICP提供一个更好的初始变换估计。这是现代配准流水线的标准步骤。
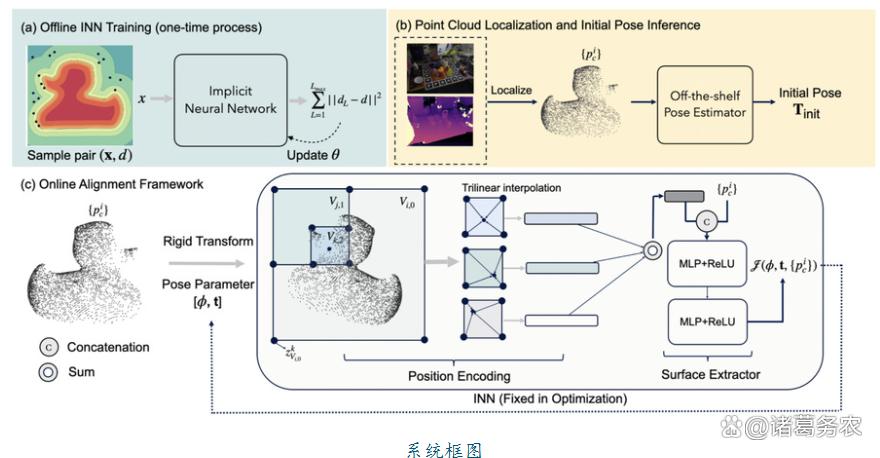
6D物体位姿快速精准优化方法
四、全局配准算法
当点云初始位姿完全未知时,需要使用全局配准算法来提供一个好的初值。
1. 基于特征匹配的配准:
关键点检测:在两点云中分别检测具有显著性的点(如ISS、SIFT3D)。
特征描述:为每个关键点计算一个特征描述子(高维向量),描述其周围的几何属性。
特征匹配:通过比较描述子(如最近邻搜索),建立两点云关键点之间的对应关系。
鲁棒变换估计:由于匹配中存在大量错误对应关系,使用随机采样一致性 等鲁棒估计算法,从所有匹配对中筛选出正确的“内点”,并计算出初始变换 (R, t)。
2. 4PCS、Super4PCS:
基于寻找共面四点集的仿射不变性来进行匹配,对重叠率低的情况表现较好。
五、现代趋势:深度学习点云配准
深度学习也被引入来解决配准问题:
1. 学习型特征描述子:
使用神经网络(如PointNet, DGCNN)学习比手工特征更强大、更具判别力的点特征,从而得到更可靠的匹配。
2. 端到端配准:
一些网络(如DCP, PRNet)可以直接预测变换矩阵 (R, t),避免了迭代过程。
3. 局部性优化:
目前深度学习在初始对齐上表现出色,但其精度往往仍不及经过精细优化的传统算法(如Point-to-Plane ICP)。因此,常见的策略是“深度网络提供初值 + 传统ICP进行精配准”。
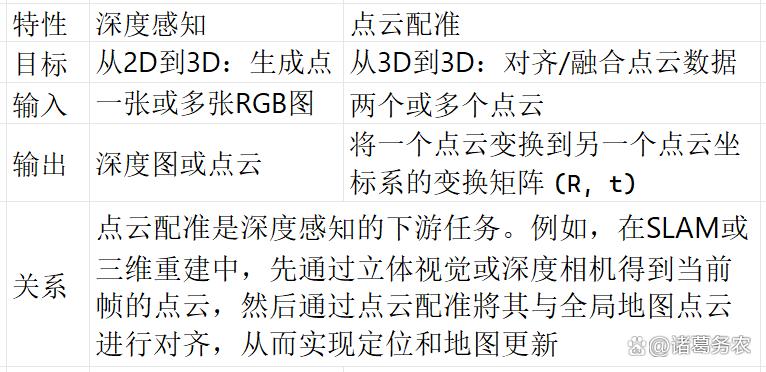
点云配准与深度感知的关联
第二节:ICP算法核心内容及其人形机器人中的应用
一、ICP算法核心内容
ICP算法的核心思想是迭代优化:通过不断寻找最近点对,计算并应用变换,最小化点云间的误差。
1. 典型算法流程
一个典型的ICP算法流程包括以下步骤:
最近点搜索:为源点云中的每个点,在目标点云中寻找最近邻点。
计算变换矩阵:根据匹配点对,利用最小二乘法等(如SVD分解)计算最优的旋转矩阵 R 和平移向量 t。
应用变换:将计算得到的变换应用于源点云。
迭代优化:重复上述步骤,直到满足收敛条件(如误差小于阈值或达到最大迭代次数)。
2. 主要变体及其特点和优势
1)特点
下表总结了ICP算法的主要变体及其特点:
2. 主要优势:
原理直观,实现相对简单:其核心思想(迭代寻找最近点并通过SVD等计算变换矩阵)清晰,便于理解和工程实现。
计算效率相对较高:特别是在点云经过适当预处理(如下采样)和加速结构(如KD-Tree)优化后,能满足一定的实时性要求。
在良好初始位姿下精度较高:当两个点云之间的初始位姿估计较为准确时,ICP算法可以通过迭代细化获得较高的配准精度。
3. ICP算法本身存在的固有挑战:
对初始位姿敏感:这是ICP最著名的缺点。如果初始估计不佳,算法极易陷入局部最优解,导致配准失败。这对于在复杂、动态环境中需要实时定位和识别的机器人来说尤为棘手。
对噪声和离群点敏感:传感器(如深度相机、激光雷达)采集的点云数据不可避免地包含噪声和离群点。ICP算法在匹配时会受到这些点的干扰,影响配准精度。
依赖点云重叠度:要求待配准的两片点云之间有足够的重叠区域。低重叠度(例如低于30%)会大大增加正确配准的难度。
计算开销与精度平衡:高精度的配准需要处理大量的点,计算最近邻点的开销很大,虽可通过KD-Tree等加速,但在资源受限的嵌入式平台上仍需仔细权衡。
二、ICP算法的最新进展
为了克服上述挑战,研究者们提出了许多改进方案,主要集中在以下几个方面:
1. 更强的鲁棒性与准确性
语义信息融合:SAGE-ICP 等方法将语义信息引入ICP流程。例如,在数据关联阶段,优先或只考虑语义标签一致的点对进行匹配。这显著增强了算法在动态环境(如排除移动车辆)下的鲁棒性,并能更准确地匹配具有类似语义结构的区域。
更好的特征提取与利用:改进的特征提取方法能获得更稳定、更具代表性的关键点。例如,基于局部密度或等曲率特征点的方法进行粗配准,提高了后续ICP精配准的成功率和效率。
改进的搜索策略与优化方法:采用KD-Tree等数据结构加速最近点搜索。在计算变换时,引入加权最小二乘或鲁棒估计器(如RANSAC)来降低噪声和离群点的影响。
2. 更快的配准速度
高效采样策略:不再使用全部点云进行计算,而是采用随机采样、基于特征的采样或多尺度采样策略,在保持精度的同时大幅减少计算量。
并行计算与硬件加速:利用GPU的并行计算能力加速最近邻搜索和矩阵运算,是实现实时配准的关键。
3. 更广的适用性
无标记自动配准:在林业测绘等领域,出现了如基于树木分枝结构特征的无标记自动配准方法。这些方法从场景本身提取稳定特征(如树干、枝干),无需人工标记,实现了大规模场景的自动配准。
针对特定结构的配准:对于工业零件中的特定结构(如圆孔),有研究提出了基于伪特征四边形的配准算法,先进行粗配准再进行ICP精配准,提高了此类结构的配准精度和效率。
(未完待续)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 13
13 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)