九点标定背后的相关问题
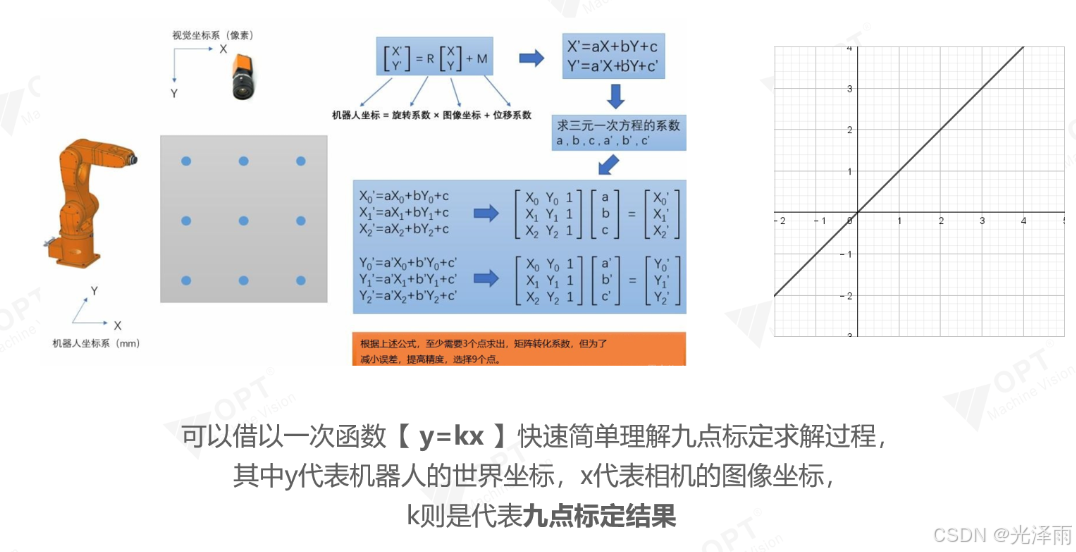
如何让机器人知道相片里的像素点(Pixel)对应现实世界中的哪个位置(mm)。这张图通过类比初中数学的一次函数,将复杂的仿射变换(Affine Transformation)通俗化了:图中提到 y = kx。x(输入):相机的图像坐标(像素单位),即你在 Smart3 软件里识别出的特征中心点。y (输出):机器人的世界坐标(毫米单位),即 PLC 最终需要的物理坐标。k (结果):这就是九点标定
如何让机器人知道相片里的像素点(Pixel)对应现实世界中的哪个位置(mm)。
📐 九点标定原理拆解
这张图通过类比初中数学的一次函数,将复杂的仿射变换(Affine Transformation)通俗化了:
1. 核心公式类比
图中提到 y = kx。
-
x(输入):相机的图像坐标(像素单位),即你在 Smart3 软件里识别出的特征中心点。
-
y (输出):机器人的世界坐标(毫米单位),即 PLC 最终需要的物理坐标。
-
k (结果):这就是九点标定求出的“转换算子”(一个包含旋转、平移和缩放的矩阵)。
2. 数学公式的深度拆解

-
旋转与缩放 (R):解决相机装歪了、或者像素与毫米比例不一致的问题。
-
平移 (M):解决相机中心点和机器人原点不重合的问题。
-
三元一次方程组:
-
为了求出 $a, b, c$(控制 X 方向转换)和 $a', b', c'$(控制 Y 方向转换)这 6 个未知数,理论上至少需要 3 组点。
-
为什么要九个点? 为了通过最小二乘法减少机械误差和镜头畸变带来的偶然误差。九个点能提供足够的冗余,让结果更精准。
现场实操的关键注意事项
-
标定板位姿:九个点要尽量铺满相机视野的 70%-80%。如果你的九个点只缩在画面中心小小的一个方块里,边缘的精度会烂得一塌糊涂。
-
顺序一致性:机器人的 1-9 号点位动作顺序,必须与 Smart3 软件中识别像素点的 1-9 号顺序严格对应,否则算出来的矩阵是乱的,机器会往反方向跑。
-
高度一致性:标定时,标定板的高度必须和你实际生产时产品的高度完全一致(这就是所谓的“共面”)。高度差 1mm,精度可能差出几百个丝。
-
没有明白三个点是如何确定转换关系的
1. 为什么“1个点”不行?
如果你只告诉我一个像素坐标 $(100, 100)$ 对应机械坐标 $(50, 50)$,我只知道位置。但我不知道你的相机是不是歪了(旋转),也不知道 1 个像素到底代表 1 毫米还是 10 毫米(缩放)。
2. 为什么“2个点”还是不够?
有了两个点,我可以算出:
-
距离(缩放):两个点之间的像素距离 vs 物理距离,比例就出来了。
-
角度(旋转):两个点连线的斜率,旋转角度也就出来了。
-
但是,工业相机的轴向可能存在非等比例缩放(比如由于安装倾斜,导致 X 方向 1 像素代表 0.1mm,而 Y 方向 1 像素代表 0.11mm)。
3. 为什么“3个点”是最低要求?
看图里那个三元一次方程组:
$$X' = aX + bY + c$$
$$Y' = a'X + b'Y + c'$$
这里一共有 6 个未知数($a, b, c, a', b', c'$)。
在数学上,要解出 6 个未知数,你需要 6 个独立的方程。
-
1 个点提供 2 个方程(一个 X',一个 Y')。
-
3 个点正好提供 $3 \times 2 = 6$ 个方程。
通过这三个点,算法可以锁定:
-
平移 (Translation):确定原点的偏移。
-
旋转 (Rotation):确定坐标系的偏转角。
-
缩放 (Scaling):确定 X 和 Y 方向各自的单位换算比例。
-
倾斜 (Shear):确定坐标轴是否垂直(修正安装带来的拉伸变形)。
🛠️ 工业现场实操案例
想象你在大族贝瑞调一台激光打标机:
-
点 1:你告诉系统,画面左上角是 $(0,0)mm$。
-
点 2:你告诉系统,右边那个点是 $(100,0)mm$。此时系统知道 X 轴的方向和比例了。
-
点 3:你告诉系统,下面那个点是 $(0,100)mm$。此时系统知道 Y 轴的方向,并且确认了 X 和 Y 是否垂直。
标注关键注意事项:
在现场,我们严禁只用三个点。因为机械手每次移动都有误差。如果你只取 3 个点,其中任何一个点因为震动或反光偏移了 1 个像素,整个坐标系就全歪了。
九点标定的意义在于,它用 9 组数据去解这 6 个未知数。利用最小二乘法(一种数学优化手段),让这 6 个未知数能“兼顾”所有 9 个点,从而把某个点的偶然误差平摊掉,让系统变稳。
X‘为什么不等于aX
假设X’ Y‘是物理坐标,X Y是像素坐标,我不明白X’为什么要用aX+bY+c表示,X对应着X‘ 它们之间有一个系数关系就好了,上面的仿射矩阵R代表的什么,我学过线性代数,但是好多都忘了。
1. 为什么 $X'$ 不能只用 $aX$ 表示?
你直觉认为 $X$ 对应 $X'$,这在相机坐标系和机械坐标系完美平行的情况下是对的。但工业现场充满了“意外”:
-
旋转(最核心原因):想象一下,你的相机装歪了 $45^\circ$。当你让电机只沿水平 $X'$轴挪动 10mm 时,在相机画面里,目标点不仅在 $X$ 方向动了,在 $Y$ 方向也动了!
-
物理意义:$bY$ 这个项的存在,就是为了补偿“旋转”。它代表了 Y 方向的像素位移对 X 方向物理距离的影响贡献。
-
平移补偿:末尾的 $c$ 就是线性代数里的偏置,代表了两个坐标系原点之间的偏移量。
所以,$X' = aX + bY + c$ 实际上描述的是:物理世界的 X 坐标,是由像素世界的 X 位移、Y 位移以及初始偏差共同决定的。
2. 仿射矩阵 $R$ 到底代表什么?
你提到的矩阵 $R$,在线性代数里叫变换矩阵。在九点标定中,它其实是一个“多功能组合包”:

-
旋转 (Rotation):把相机的画面“旋正”到和机械手一致。
-
缩放 (Scaling):把“像素单位”转换成“毫米单位”。
-
错切 (Shearing):修正相机安装不垂直导致的图像拉伸。
当你写
时,你实际上是在做基坐标变换。
3. 回忆线性代数:3个点如何定乾坤?
你还记得解方程组吗?
我们要找的其实是这 6 个参数:$a, b, c$(控制 $X'$)和 $a', b', c'$(控制 $Y'$)。

当我们有 3 个点时,我们会得到一个非齐次线性方程组:
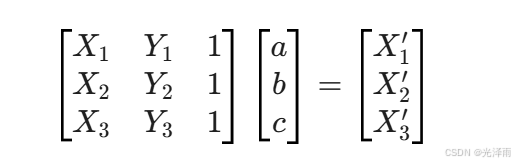
重点来了: 只要这三个点不在同一直线上(即左边的矩阵是可逆的),你就能通过矩阵求逆,唯一确定 $a, b, c$。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 26
26 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)