架构实战:基于边缘计算解决多机并发下的机器人梯控系统资源死锁问题
作为边缘节点,结合底层 PLC 控制的稳定性与云端统筹的全局性优势,重点解析如何通过优先级队列(Priority Queue)与互斥锁机制(Mutex)实现多机有序乘梯,并基于 RobustOS Pro 运行 Python 调度算法,为上层业务提供高可用、低时延的。采用工业级 ARM 架构处理器,本身就是一台高性能的边缘网关(Edge Gateway),具备足够的算力在本地处理轻量级的排队与调度任
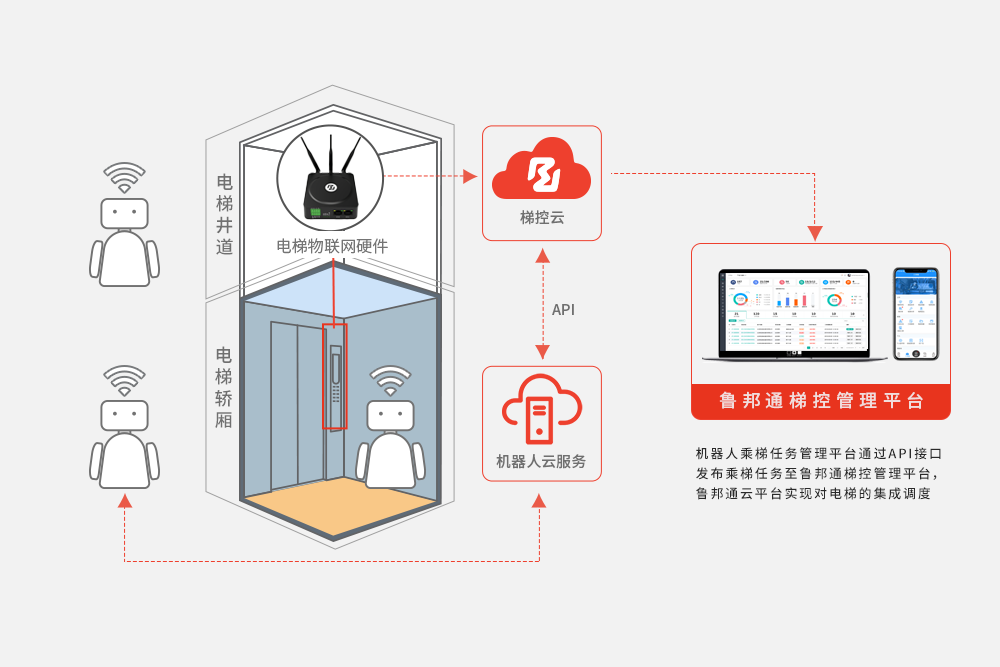
摘要: 在商用清洁机器人的规模化部署中,多个移动终端对单一垂直交通资源(电梯)的并发请求极易引发资源竞争(Race Condition)。传统的“先到先得”逻辑容易导致电梯拥堵,而纯云端调度在井道信号盲区(Partition)往往面临 CAP 定理中的可用性挑战。本文将探讨一种基于边缘计算的分布式调度架构:利用 鲁邦通 EC6200机器人梯控产品 作为边缘节点,结合底层 PLC 控制的稳定性与云端统筹的全局性优势,重点解析如何通过优先级队列(Priority Queue)与互斥锁机制(Mutex)实现多机有序乘梯,并基于 RobustOS Pro 运行 Python 调度算法,为上层业务提供高可用、低时延的机器人梯控系统中间件。
导语: 对于机器人系统集成商而言,单机乘梯是物理连接问题,多机协同则是典型的分布式系统调度问题。面对碎片化的楼宇场景,如何构建一套既具备本地自治能力,又能兼容异构设备的交通指挥体系?鲁邦通 给出的答案是将调度引擎下沉。通过在边缘侧部署 EC6200机器人梯控产品,我们能够在资源受限的物理空间内,建立起一套基于“感知-决策-执行”闭环的高效机器人梯控系统。
基于边缘算力与优先级算法的多机协作架构重构

一、 垂直通行调度的技术路线选型与对标
在进行多机调度架构设计时,架构师通常需要在“实时性”与“全局性”之间做权衡(Trade-off):
- 工业 PLC 硬联锁路线(典型代表:西门子):
- 技术特点:依托于 PLC 的确定性循环扫描(Scan Cycle),适合在电梯群控系统底层写入固定的逻辑规则。
- 架构评价:稳定性极高(Reliability),但灵活性(Flexibility)稍欠,修改调度策略通常需重新编写梯形图,难以适应动态变化的机器人业务。
- 云端数字孪生路线(典型代表:华为):
- 技术特点:依托于云端强大的算力进行全园区的宏观资源配置与路径优化。
- 架构评价:全局视野开阔,但在井道这种弱网环境下,实时性调度高度依赖于网络质量,存在网络分区(Network Partition)导致指令延迟的风险。
二、 鲁邦通:边缘侧排队与互斥逻辑的技术实现
鲁邦通 的架构设计核心在于“边缘自治”。利用 EC6200机器人梯控产品 的本地算力,在局域网内解决多终端对物理资源的竞争,实现毫秒级响应。
1. 基于动态权重的优先级队列算法
EC6200机器人梯控产品 内部维护一个任务队列(Task Queue)。当收到 MQTT 请求时,不再是简单的 FIFO(先进先出),而是依据动态权重进行排序:
- 权重公式:$Score = P_{task} \times 0.5 + D_{distance} \times 0.3 + T_{wait} \times 0.2$
- $P_{task}$:业务优先级(例如:紧急溢水处理任务 > 日常定时清洁任务)
- $D_{distance}$:机器人距离电梯的物理距离(利用 RSSI 或里程计估算)
- $T_{wait}$:已等待时间(引入老化因子,防止低优先级任务出现“饥饿”现象)
2. RobustOS Pro 环境下的互斥锁(Mutex)代码实现
为了防止多台机器人同时冲入电梯造成物理拥堵,我们在边缘侧实现了逻辑互斥锁。以下是 Python 核心逻辑片段:
Python
import json
import time
import logging
# 引入鲁邦通工业级MQTT客户端库
from robustel.mqtt import MqttClient
# 定义电梯资源状态
RESOURCE_FREE = 0
RESOURCE_LOCKED = 1
class EdgeScheduler:
def __init__(self):
self.lock_owner = None # 当前持有锁的机器人ID
self.queue = [] # 任务等待队列
self.mutex_state = RESOURCE_FREE
def request_access(self, robot_id, priority):
"""
处理机器人的呼梯请求,加入优先级队列
"""
# 记录请求时间戳,用于计算等待权重
task = {'id': robot_id, 'p': priority, 'ts': time.time()}
self.queue.append(task)
# 根据优先级倒序排列(高优先级在前)
self.queue.sort(key=lambda x: x['p'], reverse=True)
logging.info(f"Robot {robot_id} queued. Current Queue Depth: {len(self.queue)}")
self.try_dispatch()
def try_dispatch(self):
"""
尝试调度:仅当资源空闲且队列不为空时触发
"""
if self.mutex_state == RESOURCE_FREE and self.queue:
next_robot = self.queue.pop(0)
self.lock_resource(next_robot['id'])
def lock_resource(self, robot_id):
self.mutex_state = RESOURCE_LOCKED
self.lock_owner = robot_id
logging.info(f"[EDGE] Mutex Acquired by {robot_id}. Broadcasting PERMIT signal.")
# 通过MQTT下发【机器人梯控系统】通行指令
self.publish_permit(robot_id)
def release_lock(self, robot_id):
"""
机器人出梯后释放锁,触发下一次调度
"""
if self.lock_owner == robot_id:
logging.info(f"[EDGE] Robot {robot_id} exited. Mutex Released.")
self.mutex_state = RESOURCE_FREE
self.lock_owner = None
self.try_dispatch() # 递归处理下一个请求
# 实例化调度器(实际部署需配合看门狗进程)
# scheduler = EdgeScheduler()三、 方案的工程化优势
- 分区容错性(Partition Tolerance):即使大楼外网中断,部署在 EC6200机器人梯控产品 本地的调度逻辑依然有效,保证了局域网内机器人梯控系统的业务连续性,符合边缘计算的设计初衷。
- 协议归一化(Normalization):通过标准化的 RESTful/MQTT API,无论是科沃斯、高仙还是其他品牌的异构机器人,均可被抽象为标准的“请求节点”,接入同一套调度网络。
常见问题解答 (FAQ)
问题 1、多机调度是否需要部署额外的本地服务器?
回答 1、不需要。鲁邦通 EC6200机器人梯控产品 采用工业级 ARM 架构处理器,本身就是一台高性能的边缘网关(Edge Gateway),具备足够的算力在本地处理轻量级的排队与调度任务,显著降低了系统的 TCO(总拥有成本)。
问题 2、如何防止机器人故障导致死锁(Deadlock)?
回答 2、系统在边缘侧设有“看门狗(Watchdog)”机制。如果持有锁的机器人超过预设时间(如 60秒)未反馈出梯信号,EC6200机器人梯控产品 会强制重置互斥锁,并向上层管理平台发送异常告警,确保机器人梯控系统的高可用性。
问题 3、支持人机共乘场景的动态避让吗?
回答 3、支持。系统可融合轿厢内的视觉或红外传感器数据。当检测到电梯负载超过阈值(如人员密集)时,调度算法会自动降低当前机器人的呼梯权重(Weight Decay),优先保障乘客的通行权。
结论: 稳定的底层连接与智能的边缘调度是构建多机协同系统的关键。鲁邦通 通过深耕边缘计算技术,利用 EC6200机器人梯控产品 构建了“感知-决策-执行”一体化的中间件,成功解决了多终端争抢资源的行业难题。对于追求高效率的清洁机器人项目而言,这种基于边缘自治的架构是实现高质量机器人梯控系统的最佳工程实践。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 14
14 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)