机器人入门一-----数学基础之线性代数篇
两个向量相加,即对应分量相加。若向量 a=(a1,a2,a3),b=(b1,b2,b3),则a+b=(a1+b1,a2+b2,a3+b3)。
本文主要针对计算机相关专业的同学,你们已经具备了基础的python或者C++编程基础,数学方面也该有所见解。本章主要介绍数学知识里的一些重点以及学习路径。
一、线性代数
学之前我们得先知道线性代数在机器人领域中的作用,在机器人中,线性代数主要适用于:
1、机器人运动学(正运动学、逆运动学)中的坐标变换,使用齐次变换矩阵(4x4矩阵)表示旋转和平移。
2、机器人动力学(牛顿-欧拉方程、拉格朗日方程)中的矩阵运算。
3、状态估计(如卡尔曼滤波)中的协方差矩阵、状态转移矩阵、观测矩阵等。
4、计算机视觉中的相机模型(内参矩阵、外参矩阵)、三维点重建等。
5、路径规划中的空间表示(如占据栅格地图)和优化问题。
因此,我们需要重点学习以下内容:
一、向量和矩阵的基本运算
1. 向量加法
-
定义:两个向量相加,即对应分量相加。
若向量 a=(a1,a2,a3),b=(b1,b2,b3),则a+b=(a1+b1,a2+b2,a3+b3)。 -
几何意义:遵循平行四边形法则或三角形法则,表示位移的叠加。
2. 标量乘法
-
定义:一个标量k与向量 a=(a1,a2,a3)相乘,即每个分量乘以k:ka=(ka1,ka2,ka3)。
-
几何意义:缩放向量的长度,若 k<0则方向反向。
3. 点积(内积)
-
定义:两个向量的点积是一个标量,计算为对应分量乘积之和。

-
几何意义:a⋅b=∣a∣∣b∣cosθ,其中θ为夹角。可用于判断垂直性和投影。
4. 叉积(向量积)
-
定义:仅适用于三维向量,结果是一个向量。

-
几何意义:结果向量垂直于a和b,方向由右手定则确定,长度 ∣a×b∣=∣a∣∣b∣sinθ,表示以a、b为边的平行四边形面积。
5. 矩阵加法
-
定义:只有同型矩阵(行数和列数分别相等)才能相加。对应位置的元素相加。
-
计算:

-
条件:必须同型。
-
性质:

-
示例:

6. 矩阵乘法
这是最重要且最容易出错的运算。
-
定义:矩阵A与B相乘,要求A的列数等于B的行数。结果矩阵C的行数等于A的行数,列数等于B的列数。
-
计算:若A是m×p矩阵,B是p×n矩阵,则C=A×B是m×n矩阵。其中C的第i行第j列元素Cij等于A的第i行向量与B的第j列向量的点积。

-
条件:A的列数 = B的行数。
-
重要性质:
-
不满足交换律:绝大多数情况下 AB≠BA。
-
满足结合律:(AB)C=A(BC)
-
满足分配律:A(B+C)=AB+AC, (B+C)A=BA+CA。
-
-
示例:

注意:如果反过来乘,维度可能不匹配,即使匹配结果也不同。

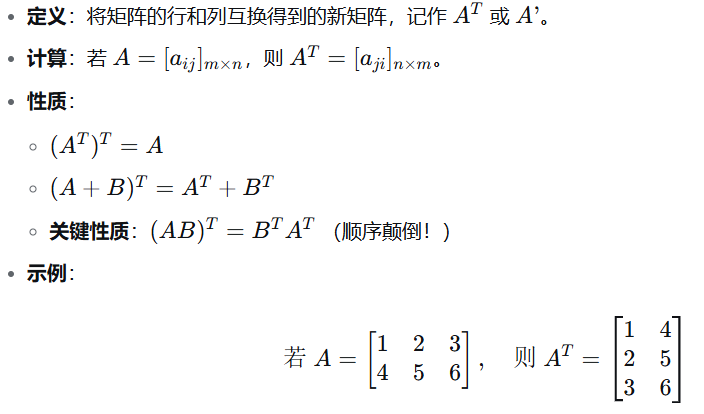
7. 矩阵的转置
8. 矩阵的逆
-

验证:
二、矩阵的行列式、特征值和特征向量
-
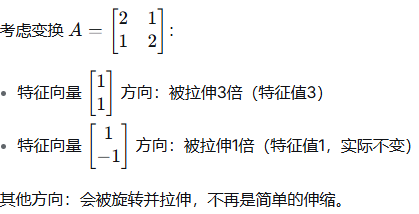
特征向量 是在这个变换下方向保持不变的向量(只被拉伸或压缩,不旋转)
-
特征值 是这个特征向量被拉伸或压缩的倍数
-
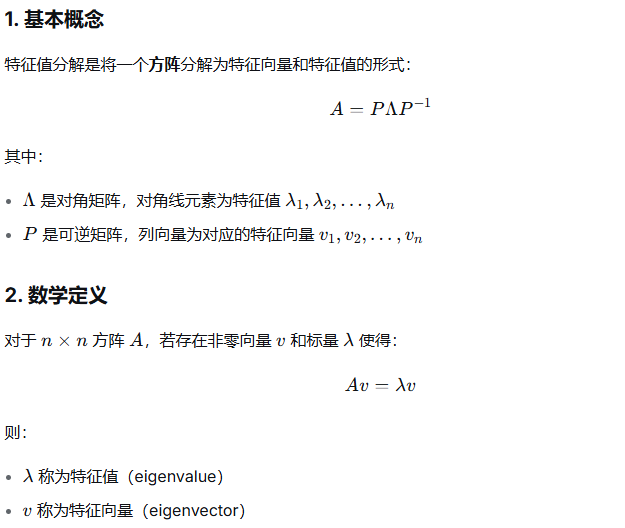
数学定义:对于方阵A,如果存在非零向量v和标量λ,使得:Av=λv。则λ称为A的特征值,v称为对应于λ的特征向量。
-
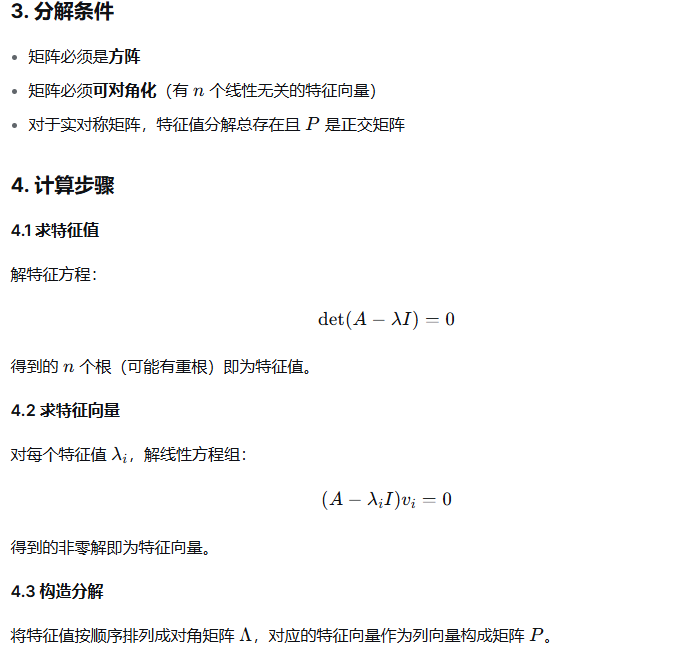
计算步骤
-
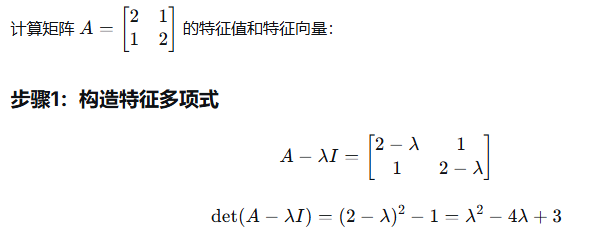
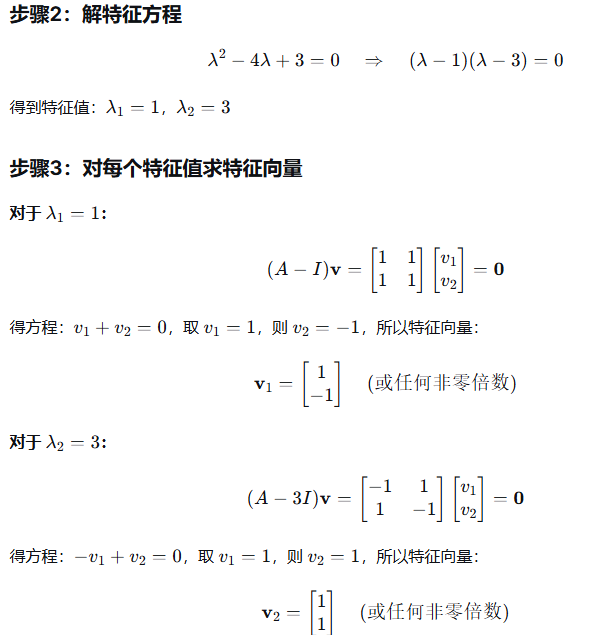
1.求特征值
-
特征值通过解特征方程得到:det(A−λI)=0
其中I是单位矩阵,det表示行列式。
特征多项式:det(A−λI)是λ的n次多项式。
2、求特征向量对每个特征值λi,解齐次线性方程组:
所有非零解都是对应于λi的特征向量。
-
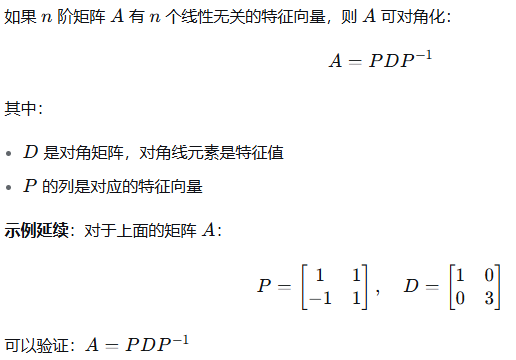
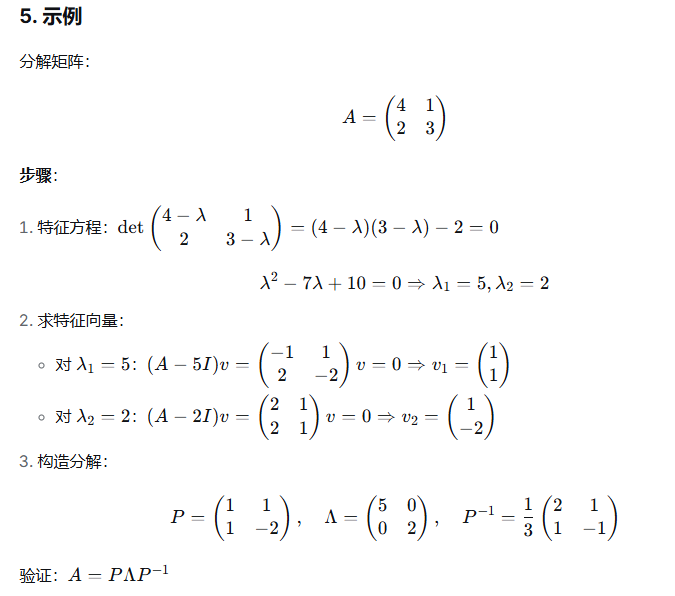
示例
-
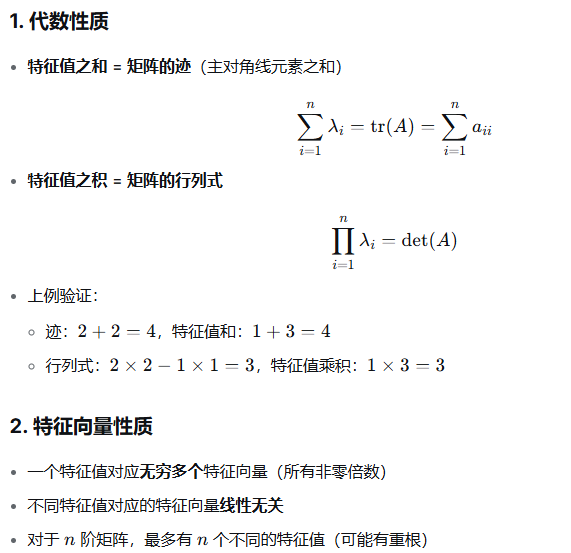
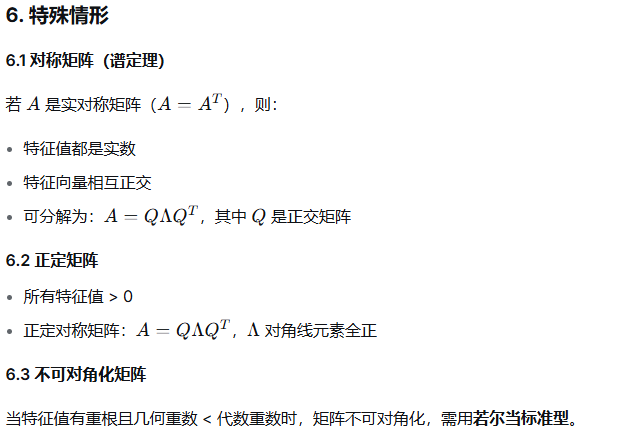
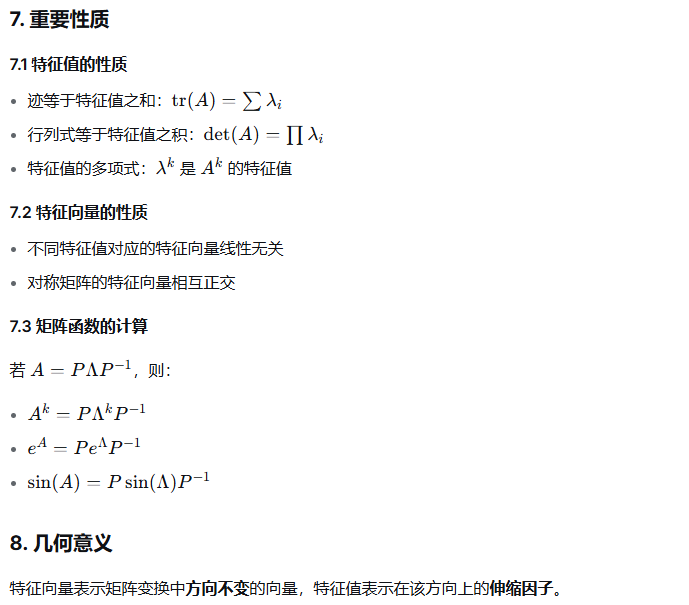
重要性质
-
矩阵对角化
-
几何解释
-
注意事项
1、特征向量必须是非零向量
2、特征值可以是复数(即使矩阵元素都是实数)
3、重特征值可能对应多个线性无关的特征向量,也可能只对应一个
4、不是所有矩阵都可对角化(当线性无关特征向量少于 nn 时)
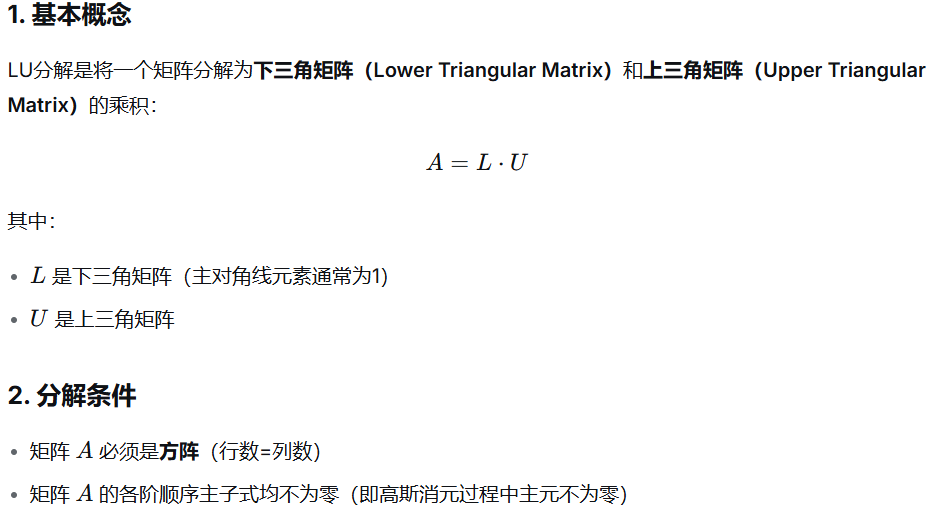
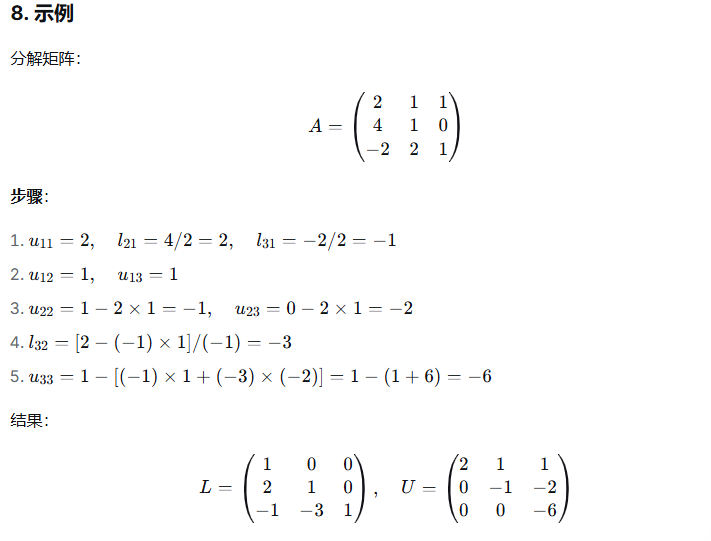
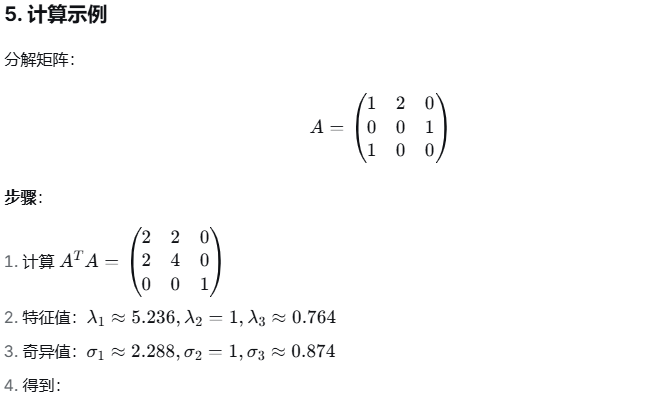
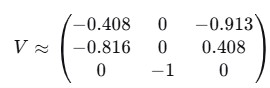
三、矩阵的分解
LU分解,QR分解,SVD分解,奇异值分解
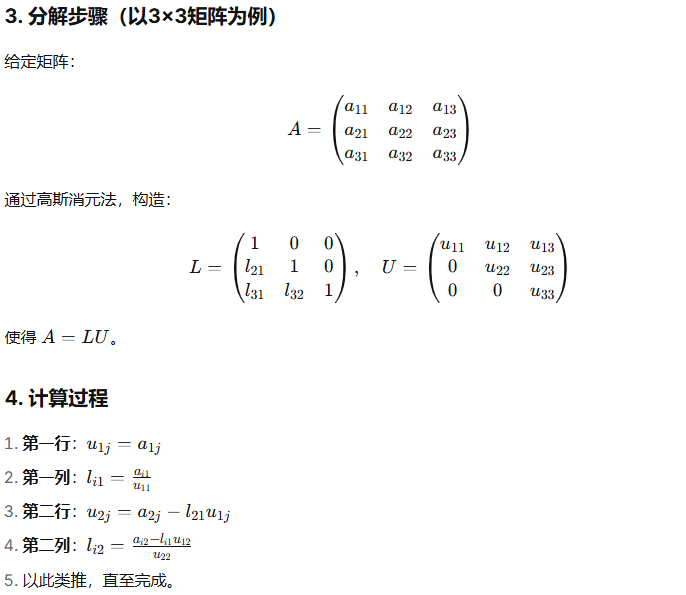
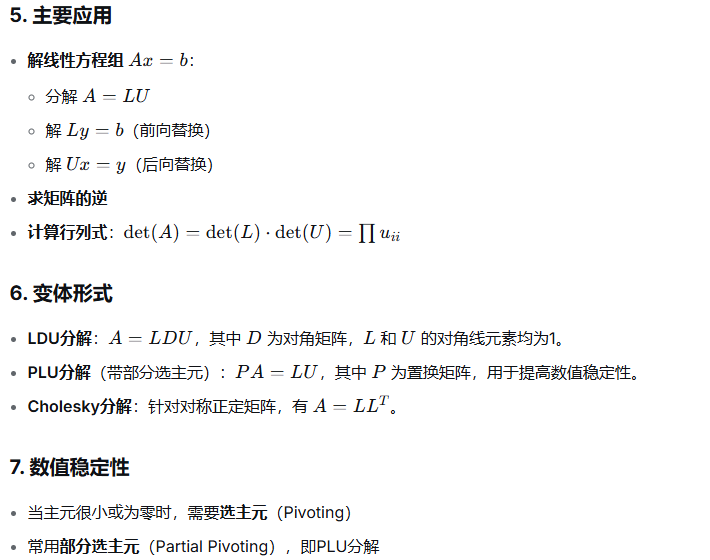
1、LU分解
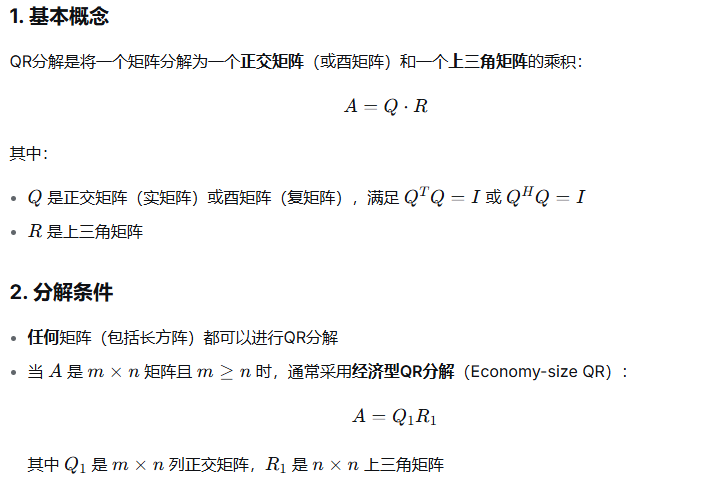
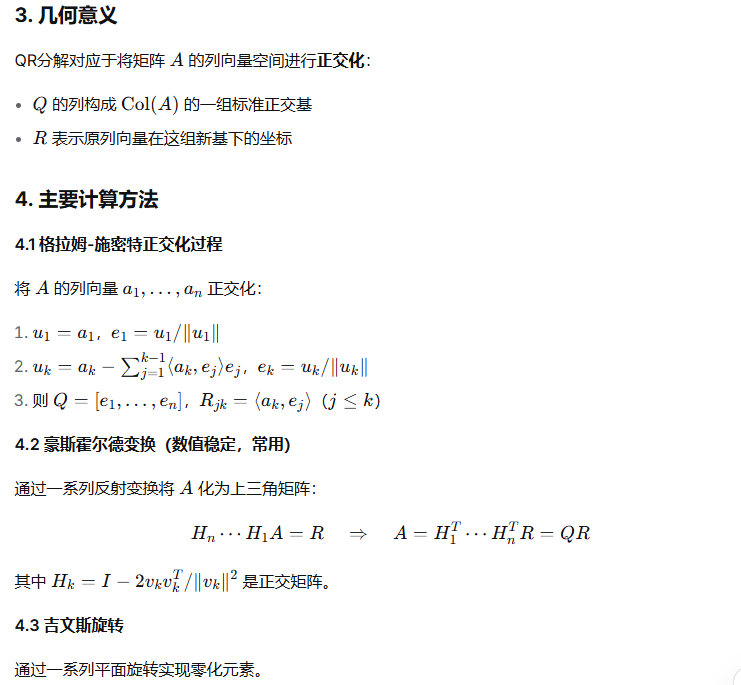
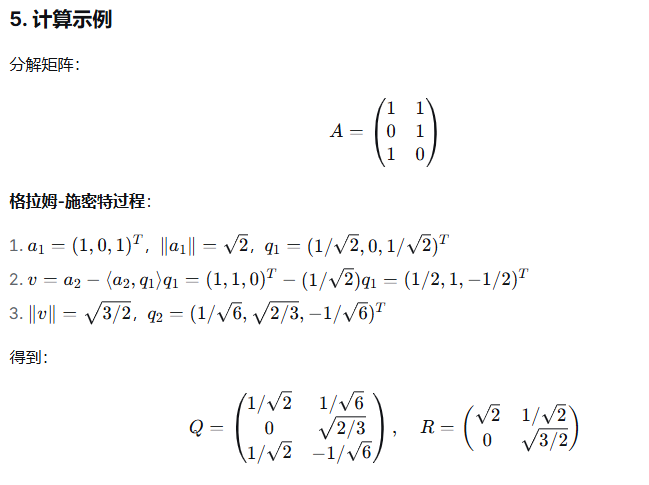
2、QR分解
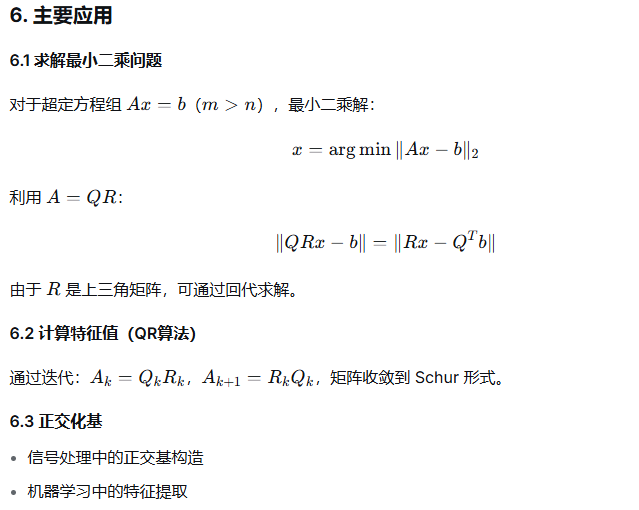
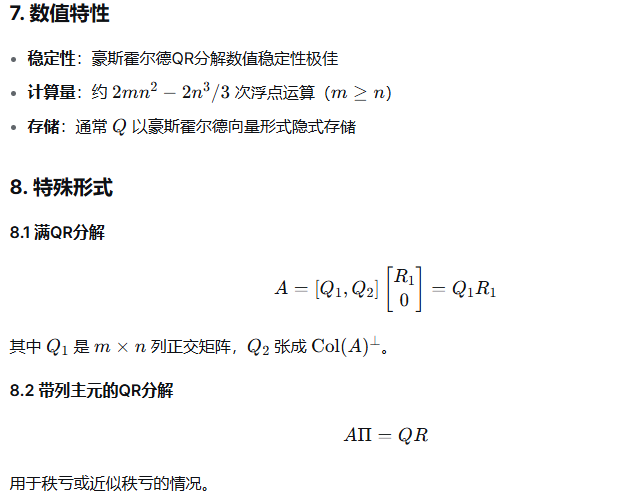
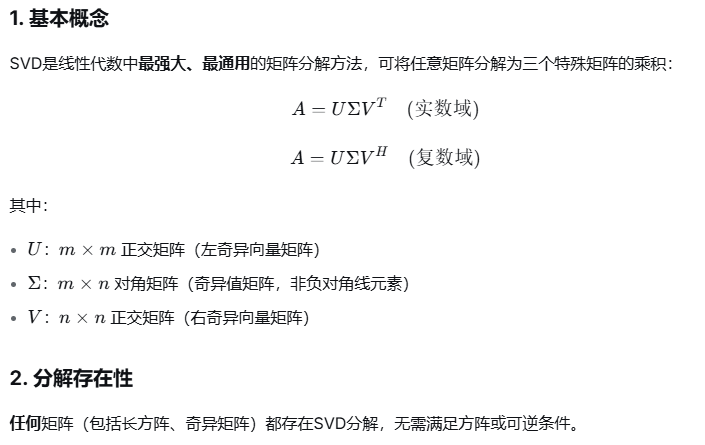
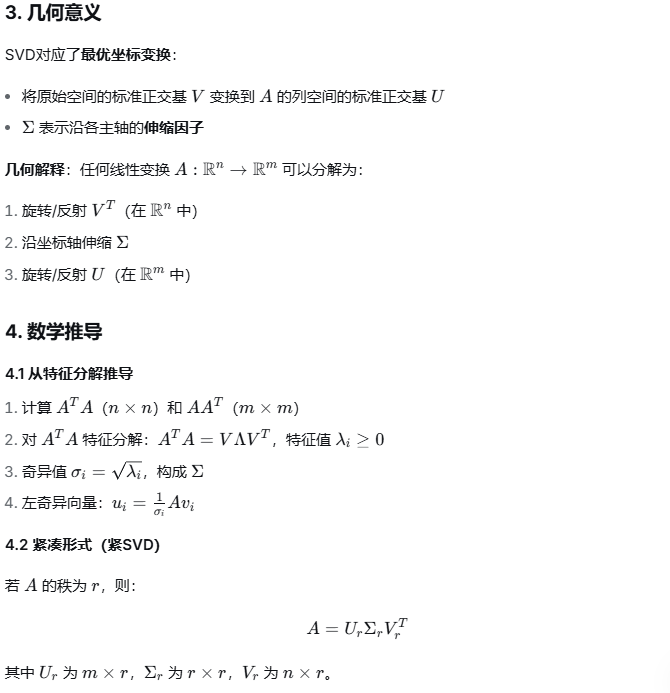
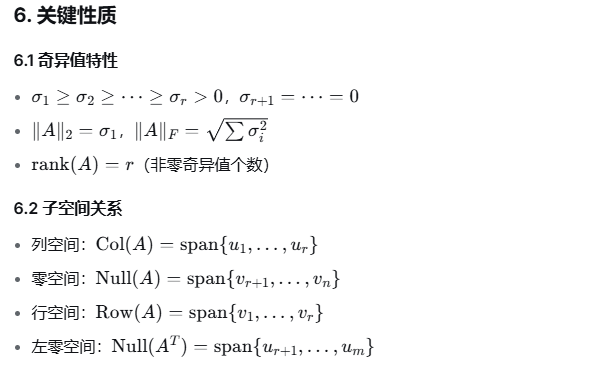
3、SVD分解

4、特征值分解

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)