【花雕学编程】Arduino BLDC 之动态分配探索区域避免重复路径机器人
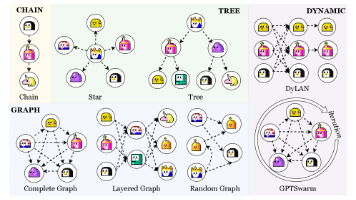
本文介绍了基于Arduino BLDC的多机器人协同探索系统,通过分布式算法实现动态区域划分与路径优化。系统采用前沿扩展算法和Voronoi图分割机制,使多台机器人能高效协作完成未知环境探测,避免路径重复。核心特点包括:分布式协同探索、拓扑地图构建、BLDC电机精准控制。应用场景涵盖仓储盘点、农业监测等大面积环境探测。文中还分析了通信延迟、计算资源分配等技术挑战,并提供了多机器人协同勘探系统、强化

“Arduino BLDC之动态分配探索区域避免重复路径机器人”是一个典型的多智能体协同与自主探索系统。它超越了单机SLAM的范畴,旨在通过多台由Arduino控制的BLDC移动机器人协同工作,利用分布式算法动态划分未知环境的探索区域,从而在最短时间内完成全覆盖探测,同时严格避免路径重复和资源浪费。
一、主要特点
分布式协同探索与区域划分
该系统的核心在于多机器人之间的协作逻辑,而非单机的运动控制。
前沿扩展算法:每台机器人利用激光雷达或深度相机构建局部地图,识别出“前沿”——即已知区域与未知区域的边界。通过评估前沿的熵或信息增益,计算出最具探索价值的目标点。
动态区域分配:采用如分布式拍卖算法或Voronoi图分割机制。当一台机器人发现新的探索区域时,会通过通信网络向队友广播。队友根据距离、剩余电量和当前任务负载,通过协商机制动态认领该区域,确保覆盖无遗漏且无重叠。
基于拓扑的地图管理与回环检测
拓扑地图构建:除了传统的栅格地图,系统会构建拓扑地图,记录关键节点(如路口、房间)及其连接关系。这有助于机器人理解环境结构,从而更智能地分配区域。
协同回环检测:当两台机器人的探索区域相遇时,需要进行地图匹配和坐标系对齐。通过检测回环,消除累积误差,并更新全局地图,确保多机探索结果的一致性。
高效的底层运动控制
BLDC驱动优势:BLDC电机的高效率和长寿命特性,使得机器人能够长时间维持高频的探索运动(如前进、转向、避障),减少因动力系统故障导致的探索中断。
精确轨迹跟踪:Arduino通过运行PID控制算法,确保机器人能够精确跟踪规划出的探索路径,即使在复杂的室内环境中也能保持稳定的运动速度和航向,提高探索效率。
二、应用场景
大面积未知环境快速建图
场景:如大型仓库、工业园区、地下矿井或地震后的废墟区域,单台机器人建图耗时过长,且容易因电量耗尽而中断任务。
应用:多台机器人从不同入口同时进入,动态划分探索区域。例如,机器人A负责东区,机器人B负责西区。它们独立探索,最后在中心汇合地图数据,将建图时间缩短为单机的1/N(N为机器人数量)。
智能仓储与物流盘点
场景:在大型电商仓库中,需要定期盘点货物位置和数量。
应用:多台AGV(自动导引车)搭载扫描设备,在非工作时间动态分配货架通道的探索路径。通过避免重复路径,确保每一排货架都被且仅被扫描一次,极大提高盘点效率和准确性。
农业精准监测与植保
场景:在广阔的农田或果园中,需要监测作物生长状况、病虫害分布。
应用:多台地面或低空机器人协同作业,将农田划分为多个区块。每台机器人负责一个区块的光谱数据采集或农药喷洒,通过动态避障和区域分配,确保全覆盖无遗漏,同时减少农药重喷造成的浪费和药害。
三、需要注意的事项
通信带宽与延迟的限制
挑战:动态区域分配需要频繁交换地图数据、位置信息和任务状态。在复杂环境中(如多墙阻隔),无线信号衰减严重,可能导致通信延迟或中断,进而引发多机探索同一区域或出现探索盲区。
对策:采用轻量级通信协议(如ROS的自定义消息),压缩地图数据传输量。设计断连重连机制,当通信中断时,机器人切换至独立探索模式,待恢复后进行地图融合。
计算资源与实时性的平衡
挑战:动态区域划分和路径规划算法计算量巨大。Arduino Uno/Nano等8位单片机无法胜任,即使使用高性能Arduino(如Due、Mega),处理复杂的多机协同算法也面临算力瓶颈。
对策:采用“上位机+下位机”架构。上位机(如Jetson Nano、Raspberry Pi)运行复杂的协同算法和地图构建,Arduino作为下位机专注于底层电机控制、传感器数据采集及紧急避障逻辑的执行,确保系统的实时性和稳定性。
任务分配的公平性与负载均衡
挑战:如果任务分配不均,可能导致部分机器人过早耗尽电量,而其他机器人仍在工作,影响整体效率。
对策:在区域分配算法中引入负载均衡因子,如剩余电量、距离目标点的远近、当前任务量等。优先分配任务给状态最优的机器人,确保所有机器人能协同完成任务。
地图融合与坐标系对齐
挑战:多台机器人从不同起点开始探索,其局部地图的坐标系不一致。如何将这些局部地图无缝拼接成一张全局地图,是一个技术难点。
对策:利用GPS(室外)或UWB(室内)提供绝对位置参考,或通过协同SLAM技术,在机器人相遇时通过特征匹配进行坐标变换,实现地图的全局一致性。

1、多机器人网格化协同勘探系统
#include <NRF24L01.h>
#include <GridMapping.h>
#include <PID_v1.h>
// 网络配置
NRF24 radio(CE, CSN); // 无线通信模块
const uint8_t NODE_ID = 0xAB; // 本机节点编号
GridMap globalMap(MAP_SIZE, CELL_SIZE); // 共享地图实例
// 运动控制参数
double Kp = 1.2, Ki = 0.3, Kd = 0.05;
PIDController motionPID(¤tX, &targetX, Kp, Ki, Kd);
void setup() {
radio.begin(); // 初始化无线模块
radio.setChannel(CHANNEL); // 设置通信频道
radio.openWritingPipe(NODE_ID); // 绑定接收节点
}
void loop() {
// 1. 获取相邻节点状态
NodeStatus neighbors[MAX_NEIGHBORS];
radio.readNeighbors(neighbors); // 广播请求周围节点信息
// 2. 计算未探索单元格
Cell unvisitedCells[MAX_CELLS];
int cellCount = findUnvisitedCells(globalMap, neighbors);
// 3. D*Lite路径规划
Path optimalPath = dStarLite(unvisitedCells, currentPosition);
followPath(optimalPath); // 执行路径跟踪
// 4. 防碰撞协议
if (detectCollisionRisk()) {
adjustVelocity(SAFETY_MARGIN); // 减速避让
sendCollisionAlert(); // 通知其他节点更新预留缓冲区
}
delay(COMMUNICATION_INTERVAL); // 降低功耗轮询周期
}
要点解读:
分布式拓扑维护:每个节点维护局部连通图,通过Gossip协议同步全局视图。
时空冲突解决:采用时间片复用技术划分信道访问时段,避免同频干扰。
能耗均衡策略:根据电池余量自动切换休眠/唤醒状态,延长网络寿命。
故障容错机制:当某节点失联时,其负责区域由邻近节点接管并标记为高风险区。
动态负载迁移:发现新兴趣点后触发拍卖算法重新分配任务权重。
2、强化学习驱动的自适应巡逻机器人
#include <TensorFlowLite.h>
#include <CameraModule.h>
#include <MotorControl.h>
// 模型加载
tflite::MicroErrorReporter error_reporter;
tflite::MicroInterpreter interpreter(&error_reporter);
const tflite::Model* model = nullptr; // CNN模型指针
void setup() {
camera.init(); // OV7670摄像头初始化
loadModel(“exploration_model.tflite”); // 从Flash加载预训练模型
interpreter.allocateTensors(); // 分配张量内存
}
void loop() {
// 1. 视觉采集预处理
QRCodeFeatures features;
camera.captureFrame(); // 拍摄环境图像
extractQRFeatures(features); // 提取二维码特征向量
// 2. 神经网络推理
interpreter.input(0)->data.f = features.data;
interpreter.invoke(); // 运行前向传播
ActionPolicy action = getTopKAction(interpreter.output(0));
// 3. 混合整数规划决策
float reward = evaluateExplorationGain(); // 计算探索收益函数
updateQTable(state, action, reward); // Q-learning表更新
executeSelectedAction(action); // 执行最高置信度动作
avoidVisitedAreas(); // 调用A*算法绕开已覆盖区域
}
要点解读:
轻量化模型设计:使用MobileNetV2架构压缩至<1MB适合嵌入式部署。
在线增量学习:通过滑动窗口积累经验回放池实现持续进化。
好奇心驱动机制:设置内在奖励鼓励探索未知区域而非重复路径。
安全探索边界:限制最大偏航角度防止陷入局部最优循环。
硬件加速优化:利用CMSIS-DSP库在Cortex-M4上实现高效卷积运算。
3、激光雷达SLAM+Voronoi图分区系统
#include <RPLIDAR.h>
#include <VoronoiDiagram.h>
#include <PathPlanner.h>
// 空间分割组件
RPLIDAR lidar(Serial1, 57600); // RPLIDAR A1连接方式
VoronoiGraph voronoi; // Voronoi图生成器
PathPlanner planner; // 路径规划引擎
void setup() {
lidar.begin(); // 初始化激光雷达
planner.loadConfig("config.json"); // 读取导航配置文件
}
void loop() {
LaserScan scan = lidar.getLatestScan(); // 获取360°点云数据
// 1. 构建占用栅格地图
OccupancyGrid grid = convertToGrid(scan);
applyMedianFilter(grid); // 去除椒盐噪声
// 2. Voronoi图生成与修剪
voronoi.generate(grid); // 根据障碍物分布生成骨架线
voronoi.pruneDeadEnds(); // 删除无法到达的叶节点
// 3. 最佳下一步选择
Point nextTarget = chooseNextFrontier(voronoi, batteryLevel);
Path safePath = planner.findPath(nextTarget); // A*算法避开已知危险区
// 4. 执行曲线平滑轨迹
followBezierCurve(safePath); // B样条插值生成光滑路径
monitorExecutionErrors(); // 记录定位偏差用于后续改进
}
要点解读:
拓扑地图抽象:将连续空间转化为离散节点便于高层决策。
前沿检测算法:识别未被探索的区域作为候选目标点。
能源感知导航:综合考虑距离成本与电量消耗制定路线。
闭环修正能力:当偏离预定路径超过阈值时触发重规划流程。
多分辨率表示:粗粒度Voronoi边用于宏观导航,细粒度栅格用于微观避障。

4、基础网格化探索与路径记忆
#include <SimpleFOC.h>
#include <NewPing.h>
// 传感器与电机配置
#define TRIG_PIN 12
#define ECHO_PIN 13
NewPing sonar(TRIG_PIN, ECHO_PIN, 200);
BLDCMotor motor(7);
// 探索参数
#define GRID_SIZE 5
bool exploredGrid[GRID_SIZE][GRID_SIZE] = {false}; // 探索状态矩阵
int currentX = 0, currentY = 0; // 当前网格坐标
void setup() {
Serial.begin(115200);
motor.init();
randomSeed(analogRead(0)); // 初始化随机数
}
void loop() {
// 1. 标记当前位置为已探索
exploredGrid[currentX][currentY] = true;
// 2. 寻找未探索区域
bool moved = false;
while (!moved) {
int dir = random(4); // 随机方向:0=北,1=东,2=南,3=西
int newX = currentX, newY = currentY;
// 计算新坐标
if (dir == 0 && currentY < GRID_SIZE - 1) newY++;
else if (dir == 1 && currentX < GRID_SIZE - 1) newX++;
else if (dir == 2 && currentY > 0) newY--;
else if (dir == 3 && currentX > 0) newX--;
else continue; // 无效方向
// 检查是否已探索
if (!exploredGrid[newX][newY]) {
// 简单避障(实际需更复杂逻辑)
if (sonar.ping_cm() > 15) {
moveRobotTo(newX, newY); // 移动到新网格
currentX = newX;
currentY = newY;
moved = true;
}
}
}
// 3. 打印探索状态
Serial.print("Explored Grid: ");
for (int y = 0; y < GRID_SIZE; y++) {
for (int x = 0; x < GRID_SIZE; x++) {
Serial.print(exploredGrid[x][y] ? "1 " : "0 ");
}
Serial.println();
}
delay(500);
}
void moveRobotTo(int targetX, int targetY) {
// 简化移动逻辑(实际需PID控制或编码器定位)
motor.move(0.5); // 前进
delay(1000); // 假设移动耗时
motor.move(0);
}
5、多机器人动态任务分配(基于通信)
#include <SimpleFOC.h>
#include <NewPing.h>
#include <RF24.h>
// 通信配置
RF24 radio(10, 11); // CE, CSN
byte addresses[][6] = {"Node1", "Node2"};
// 传感器与电机
NewPing sonar(12, 13, 200);
BLDCMotor motor(7);
// 探索参数
#define GRID_SIZE 5
bool exploredGrid[GRID_SIZE][GRID_SIZE] = {false};
int currentX = 0, currentY = 0;
int robotID = 1; // 本机ID
struct Task { int x, y; bool assigned; };
Task taskQueue[GRID_SIZE * GRID_SIZE];
int taskCount = 0;
void setup() {
Serial.begin(115200);
motor.init();
radio.begin();
radio.openWritingPipe(addresses[robotID - 1]);
radio.openReadingPipe(1, addresses[1 - (robotID - 1)]); // 监听其他机器人
radio.startListening();
}
void loop() {
// 1. 接收全局任务分配
if (radio.available()) {
Task receivedTask;
radio.read(&receivedTask, sizeof(receivedTask));
if (!receivedTask.assigned) {
taskQueue[taskCount++] = receivedTask;
receivedTask.assigned = true;
radio.stopListening();
radio.write(&receivedTask, sizeof(receivedTask)); // 确认接收
radio.startListening();
}
}
// 2. 动态分配未探索区域为任务
for (int y = 0; y < GRID_SIZE; y++) {
for (int x = 0; x < GRID_SIZE; x++) {
if (!exploredGrid[x][y]) {
bool taskExists = false;
for (int i = 0; i < taskCount; i++) {
if (taskQueue[i].x == x && taskQueue[i].y == y) {
taskExists = true;
break;
}
}
if (!taskExists) {
taskQueue[taskCount++] = {x, y, false};
}
}
}
}
// 3. 执行优先级最高任务
if (taskCount > 0) {
Task nextTask = taskQueue[0];
if (moveToTarget(nextTask.x, nextTask.y)) {
exploredGrid[nextTask.x][nextTask.y] = true;
removeTask(0);
}
}
}
bool moveToTarget(int targetX, int targetY) {
// 简化路径移动(实际需A*或Dijkstra算法)
while (currentX != targetX || currentY != targetY) {
if (sonar.ping_cm() < 15) return false; // 避障失败
// 简单移动逻辑(示例)
if (currentX < targetX) { motor.move(0.5); delay(500); currentX++; }
else if (currentY < targetY) { motor.move(0.5); delay(500); currentY++; }
motor.move(0);
}
return true;
}
void removeTask(int index) {
for (int i = index; i < taskCount - 1; i++) {
taskQueue[i] = taskQueue[i + 1];
}
taskCount--;
}
6、基于势场法的动态避障与探索
#include <SimpleFOC.h>
#include <NewPing.h>
// 传感器与电机
#define TRIG_PIN 12
#define ECHO_PIN 13
NewPing sonar(TRIG_PIN, ECHO_PIN, 200);
BLDCMotor motor(7);
// 探索参数
#define GRID_SIZE 5
bool exploredGrid[GRID_SIZE][GRID_SIZE] = {false};
int currentX = 0, currentY = 0;
float potentialMap[GRID_SIZE][GRID_SIZE] = {0}; // 势场地图
void setup() {
Serial.begin(115200);
motor.init();
initializePotentialMap();
}
void loop() {
// 1. 更新势场地图(未探索区域吸引力高)
updatePotentialMap();
// 2. 选择势能最低的相邻区域
int bestX = currentX, bestY = currentY;
float minPotential = potentialMap[currentX][currentY];
for (int dx = -1; dx <= 1; dx++) {
for (int dy = -1; dy <= 1; dy++) {
if (abs(dx) + abs(dy) == 1) { // 仅检查四邻域
int nx = currentX + dx, ny = currentY + dy;
if (nx >= 0 && nx < GRID_SIZE && ny >= 0 && ny < GRID_SIZE) {
if (potentialMap[nx][ny] < minPotential && sonar.ping_cm() > 15) {
minPotential = potentialMap[nx][ny];
bestX = nx;
bestY = ny;
}
}
}
}
}
// 3. 移动到目标区域
if (bestX != currentX || bestY != currentY) {
moveRobotTo(bestX, bestY);
currentX = bestX;
currentY = bestY;
exploredGrid[currentX][currentY] = true;
}
}
void initializePotentialMap() {
for (int y = 0; y < GRID_SIZE; y++) {
for (int x = 0; x < GRID_SIZE; x++) {
potentialMap[x][y] = exploredGrid[x][y] ? 100.0 : 1.0; // 已探索区域势能高
}
}
}
void updatePotentialMap() {
for (int y = 0; y < GRID_SIZE; y++) {
for (int x = 0; x < GRID_SIZE; x++) {
if (!exploredGrid[x][y]) {
potentialMap[x][y] = 1.0; // 未探索区域吸引力
} else {
potentialMap[x][y] += 0.1; // 已探索区域势能缓慢增加
}
}
}
}
void moveRobotTo(int targetX, int targetY) {
// 简化移动(实际需PID控制)
motor.move(0.5);
delay(1000); // 假设移动耗时
motor.move(0);
}
技术解读
网格化与状态管理
通过二维数组(如exploredGrid)记录探索状态,避免重复访问。
实际场景需结合编码器或SLAM实现高精度定位(如10cm×10cm网格)。
动态任务分配机制
案例5通过无线通信(NRF24L01)实现多机器人协同,避免任务冲突。
可扩展为Leader-Follower架构或基于拍卖的任务分配算法。
势场法与路径优化
案例6利用势场地图引导探索,未探索区域势能低,机器人自然趋向未知区域。
需结合局部避障(如超声波)和全局路径规划(如A*算法)。
避障与容错设计
所有案例均包含超声波避障逻辑,但实际需更鲁棒的传感器融合(如激光雷达+深度相机)。
可增加“死区”标记(如连续3次避障失败后标记区域为不可达)。
性能优化与扩展性
使用优先级队列(如std::priority_queue)加速任务选择(案例5可优化)。
动态调整网格大小(如靠近障碍物时细分网格)提升精度。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 21
21 0
0- 0



 已为社区贡献88条内容
已为社区贡献88条内容

所有评论(0)