C#运动控制加视觉定位框架,程序用来取放料,控制卡用的是正运动ZMC408CE总线运动控制卡...
本系统提供了一个功能完备、结构清晰、易于使用的运动控制与视觉定位一体化解决方案。它不仅能够高效地完成标准的视觉引导取放料任务,其开放的架构也为更复杂的自动化应用(如精密装配、在线检测、机器人引导等)奠定了坚实的基础。对于希望快速构建高可靠性视觉引导自动化设备的开发者而言,该框架是一个极具价值的起点。
C#运动控制加视觉定位框架,程序用来取放料,控制卡用的是正运动ZMC408CE总线运动控制卡,控制六个电机,XY轴,两个Z轴,两个旋转轴,相机用的是海康,3个海康相机,视觉采取用海康SDK加Halcon动态库开发出来的,支持取料定位,纠偏和放料定位,视觉部分支持产品模板创建和保存,九点标定模板创建和保存,软件框架扩展性比较强,方便学者自己扩展 基础为零的人不要拍,适合有基础的人学习 有配套视频教程有配套视频教程有配套视频教程有配套视频教程有配套视频教程 超级详细讲解教程,带你手把手写代码,从编写思路给你讲起
本文档面向系统集成工程师、自动化设备开发人员及视觉算法工程师,详细阐述一套基于 C# 开发的运动控制与机器视觉协同工作的软件框架。该系统深度融合了正运动(ZMotion)控制器的底层驱动能力与 HALCON 视觉算法库的图像处理优势,构建了一个高精度、高可靠性的工业视觉定位与执行平台。
一、系统架构概览
本系统采用典型的分层架构设计,自下而上可分为:
- 硬件驱动层:通过
zauxdll.dll动态链接库,封装了对正运动控制器的全部操作,包括轴运动控制、I/O 信号读写、总线通信等。 - 数据模型与工具层 (
thinger.VisionModels,thinger.VisitionDAL):定义了系统核心数据结构(如标定信息、模板参数、系统配置),并提供了通用工具类(如 INI 配置文件读写、JSON 序列化、操作结果封装)。 - 业务逻辑层:实现了运动控制逻辑(如九点标定、取放料流程)与视觉处理逻辑(如模板匹配、圆/矩形检测、手眼标定)。
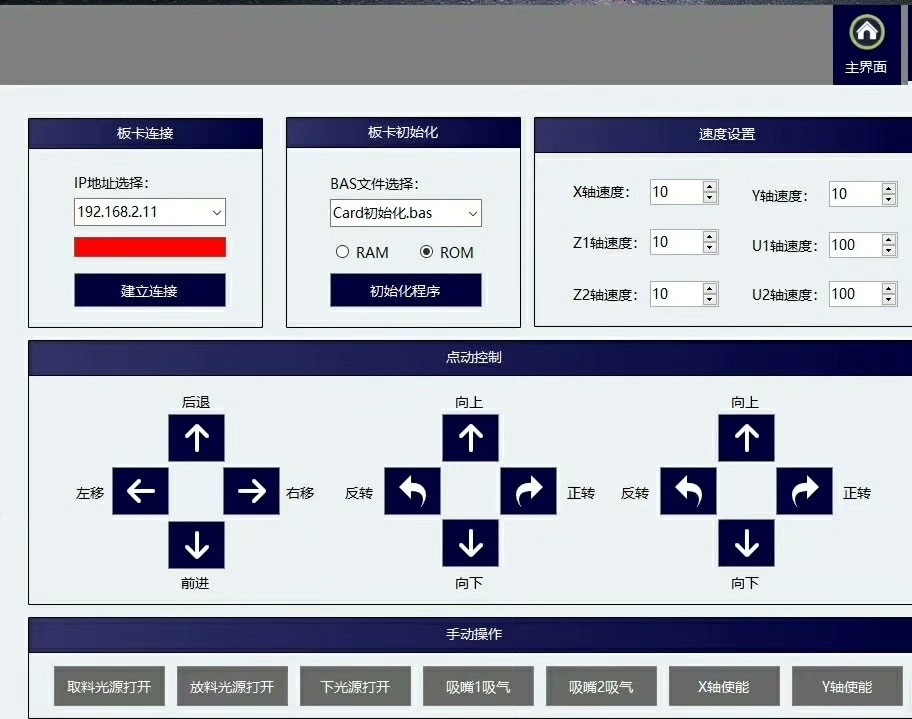
- 用户交互层 (
thinger.VisionDemo):提供图形用户界面(GUI),允许用户进行设备连接、参数配置、图像采集、标定操作、模板管理及系统运行监控。
这种清晰的分层设计确保了系统的高内聚、低耦合,便于功能扩展与维护。
二、核心功能模块详解
1. 运动控制模块
系统通过 P/Invoke 技术调用 zauxdll.dll,实现了对运动控制器的精细化控制。
- 基础轴控:支持对 X、Y、Z、U 等多轴进行点动(JOG)、绝对/相对定位、速度设置、回零等操作。关键参数如加速度、S 曲线平滑时间、随动误差限等均可动态配置,确保运动过程平稳、精准。
- I/O 与状态监控:实时读取限位开关、原点信号等输入状态,并控制气缸、电磁阀等输出设备。界面会根据限位状态动态改变按钮颜色,提供直观的安全反馈。
- 高级运动指令:支持硬件位置比较输出(PSWITCH),可在运动过程中精确触发外部设备(如相机拍照),实现高速、高同步性的“飞拍”功能。
- 系统配置管理:将轴号、运动速度、安全高度、取放料 Z 轴位置等关键参数持久化存储于配置文件中,便于不同设备间的快速部署。
2. 机器视觉模块
系统深度集成了 HALCON 图像处理库,构建了完整的视觉工作流。
- 图像采集与控制:支持多种相机类型,提供“连续模式”与“触发模式”两种采集方式。用户可实时调节曝光时间、增益、帧率等参数,并支持将图像保存为 PNG、TIFF、JPG、BMP 等多种格式。
- 特征检测与定位:
- 模板匹配:支持创建、保存、加载和查找基于形状的模板,用于精确定位目标物体。
- 几何特征提取:提供专用的圆和矩形 ROI(感兴趣区域)工具,可精确拟合图像中的圆形或矩形特征,并返回其中心坐标、角度、尺寸等信息。
- 手眼标定(九点标定):这是实现视觉引导运动的核心。系统提供完整的九点标定流程:
1. 用户在图像上选取特征点(获取图像坐标)。
2. 系统自动或手动移动机械臂至对应物理位置(获取物理坐标)。
3. 通过 HALCON 的vectortohom_mat2d算子计算出图像坐标系到物理坐标系的仿射变换矩阵(HomMat2D)。
4. 标定数据(包括变换矩阵和原始点对)可被保存和加载,用于后续的视觉定位任务。 - 标定验证:提供独立的验证界面,用户可加载已保存的标定数据和模板,通过实际图像测试标定的准确性和鲁棒性。
3. 协同工作流程(取放料示例)
系统将运动与视觉无缝结合,实现自动化任务。以经典的“取料-放料”流程为例:
- 运行到安全位:Z 轴先抬升至预设的安全高度,避免碰撞。
- 取料拍照:运动平台移动至取料位上方,触发相机拍照。
- 取料定位:视觉系统处理图像,通过模板匹配或特征提取,计算出物料在图像中的精确位置,并利用标定矩阵将其转换为物理坐标。
- 取料:运动系统根据计算出的物理坐标进行补偿运动,Z 轴下降吸取物料,再抬升。
- 放料定位:运动平台移动至放料位上方,再次拍照并定位(若放料位有视觉引导需求)。
- 放料:Z 轴下降放置物料,完成任务。
整个流程采用状态机(Step 枚举)进行管理,逻辑清晰,易于调试和扩展。
三、系统特色与优势
- 高集成度:将复杂的运动控制与视觉算法封装在统一的框架内,极大降低了开发门槛。
- 强扩展性:模块化设计使得添加新的视觉算法(如二维码识别、缺陷检测)或运动逻辑(如轨迹规划)变得非常容易。
- 高可靠性:完善的错误处理机制(
OperateResult类)贯穿整个系统,任何操作的成功与否、错误信息都能被清晰地捕获和反馈。 - 易用性:直观的图形界面和详尽的日志系统,使得设备调试、参数调整和故障排查变得高效便捷。
- 工业级精度:依托正运动控制器的硬件级同步(如 PSWITCH)和 HALCON 的亚像素级算法,系统可满足绝大多数高精度工业场景的需求。
四、总结
本系统提供了一个功能完备、结构清晰、易于使用的运动控制与视觉定位一体化解决方案。它不仅能够高效地完成标准的视觉引导取放料任务,其开放的架构也为更复杂的自动化应用(如精密装配、在线检测、机器人引导等)奠定了坚实的基础。对于希望快速构建高可靠性视觉引导自动化设备的开发者而言,该框架是一个极具价值的起点。
C#运动控制加视觉定位框架,程序用来取放料,控制卡用的是正运动ZMC408CE总线运动控制卡,控制六个电机,XY轴,两个Z轴,两个旋转轴,相机用的是海康,3个海康相机,视觉采取用海康SDK加Halcon动态库开发出来的,支持取料定位,纠偏和放料定位,视觉部分支持产品模板创建和保存,九点标定模板创建和保存,软件框架扩展性比较强,方便学者自己扩展 基础为零的人不要拍,适合有基础的人学习 有配套视频教程有配套视频教程有配套视频教程有配套视频教程有配套视频教程 超级详细讲解教程,带你手把手写代码,从编写思路给你讲起



DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 28
28 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)