基于领航者人工势场法的队形变化与避障控制: MATLAB代码仿真与集群编队算法的改进研究
本套代码基于改进人工势场法与领航者-跟随者拓扑,构建了一套完整的多机器人编队避障控制方案,涵盖算法设计、代码实现、仿真验证全流程。代码架构清晰、算法鲁棒性强、场景适配性广,可作为多机器人系统研发的基础框架,适用于无人机编队、地面机器人协同作业、仓储机器人调度等领域。通过扩展动态障碍物、智能攻击检测、硬件联调等模块,可进一步提升代码的工程应用价值,为实际多机器人项目提供技术支撑。
基于领航者人工势场法的队形变化避障控制matlab代码仿真,路径规划,改进人工势场法,拓扑结构,集群,变换队形,基于领航者与人工势场法相结合的编队控制算法,可随意变换队形 增加机器人个数
一、代码体系总览
本套Matlab代码聚焦于2D平面内多机器人(1个领航者+4个跟随者)的编队控制与避障任务,核心融合改进人工势场法与领航者-跟随者拓扑结构,同时支持队形动态切换、攻击检测与冲突规避。代码集包含21个文件,覆盖工具函数、核心控制逻辑、仿真演示三大模块,形成从底层算法支撑到上层仿真验证的完整技术链,可复现机器人从初始位置出发、保持编队队形、规避静态障碍物、向目标点运动的全流程,部分场景还能模拟攻击环境下的自适应控制。
二、模块划分与文件功能详解
(一)基础工具函数模块:算法支撑基石
基础工具函数模块提供通用计算、几何分析、图形绘制、数据处理等底层能力,是核心控制逻辑的“基础设施”,各文件功能高度内聚且可复用。
| 文件名称 | 核心功能 | 技术细节与应用场景 |
|---|---|---|
| cal_mse.m | 位置误差量化 | 输入pose(实际位置)与idealpose(理想位置),通过欧氏距离公式((pose(1)-idealpose(1))²+(pose(2)-ideal_pose(2))²)^(1/2)计算位置偏差,作为编队精度的核心评价指标,用于后续误差曲线绘制与攻击检测阈值判断 |
| compute_area.m | 仿真视口动态适配 | 理论上根据领航者x/y坐标与步长range(默认10)计算显示区域,但实际固定为[-5, 30, -5, 30],确保机器人运动全程在视口内可见,避免因位置偏移导致的可视化缺失 |
| compute_repulsion.m | 人工势场核心:斥力计算 | 1. 遍历所有障碍物/其他机器人,计算目标与当前机器人的欧氏距离; 2. 当距离≤探测半径 detectR时,通过公式temp=1.0(1/distance-1/detectR)/(distance³)(distance⁵)计算斥力系数,确保距离越近斥力越强;3. 分解斥力为 x/y方向分量,求和后输出,是避障功能的核心算法 |
| confine.m | 运动学约束控制 | 1. 输入当前速度current、期望速度next、运动学参数Kinematic(最大速度、最大加速度)与时间步长dt;2. 分别对 x/y方向速度增量进行约束:加速度不超过最大值(Kinematic(3)/4*dt)、速度不超过最大值(Kinematic(1)/2);3. 避免速度突变导致的编队溃散,保证机器人运动平滑性 |
| detect2.m | 扇形区域障碍物探测 | 1. 输入自身位置(x1,y1)、目标位置(x2,y2)、自身航向角th、扫描角度阈值threldth与探测半径radius;
2. 计算目标与自身的距离r及相对角度ang(通过seekang.m归一化到[-pi,pi]);
3. 当r≤radius且|ang|≤threldth时,判定目标在探测范围内,用于局部避障决策 |
| 图形绘制类(draw*.m) | 仿真可视化 | - drawcircle.m:按机器人编号分配颜色(color='ybgcrkr'),绘制机器人轮廓,区分不同角色;
- drawcircle2.m:支持自定义颜色,专用于绘制攻击者(红色 -r),视觉上与正常机器人区分;
- drawsecor.m:绘制扇形探测区域,直观展示机器人感知范围;
- draw_square.m:以黑色填充正方形绘制障碍物,清晰标记静态障碍区域 |
基于领航者人工势场法的队形变化避障控制matlab代码仿真,路径规划,改进人工势场法,拓扑结构,集群,变换队形,基于领航者与人工势场法相结合的编队控制算法,可随意变换队形 增加机器人个数
| motion.m | 机器人运动学模型 | 1. 输入当前位姿x=[x;y;th]、控制量u=[vt;wt](线速度、角速度)与时间步长dt;
2. 采用微分运动模型:deltath=u(2)dt,deltax=u(1)dtcos(x(3)+deltath/2),deltay=u(1)dt*sin(x(3)+delta_th/2);
3. 更新下一时刻位姿,比近似模型更精准,适用于高精度编队控制 |
| 数据处理类(normalization.m / seekang.m / 角度转换类) | 数据标准化与角度计算 | - normalization.m:将误差数据映射到[lower,upper]区间(如[0,1]),消除量纲影响,为攻击检测的SVM模型提供标准化输入;
- seekang.m:计算两个弧度角的差值并归一化到[-pi,pi],避免角度计算出现2pi跳变;
- toDegree.m/toRadian.m:实现弧度与角度的双向转换,适配不同计算场景(如可视化用角度,控制用弧度) |
(二)核心控制模块:编队逻辑中枢
核心控制模块以defend.m为核心,整合编队控制、避障策略、攻击检测与应对逻辑,是整个代码集的“大脑”,实现从感知到决策再到控制的完整闭环。
1. 核心功能拆解
- 系统初始化:定义机器人数量(
N=5)、迭代次数(countmax=800)、时间步长(dt=0.1)、运动学参数(最大速度0.4m/s、最大加速度0.4m/s²)、目标点([20,20])、障碍物坐标(obtemp)等基础参数;同时初始化机器人初始位姿(initf)、相对位置偏差(deltax/deltay)、初始速度(Vx/Vy)与攻击者初始状态(init_att)。 - 拓扑结构定义:通过邻接矩阵
A定义机器人间通信关系,例如初始矩阵:matlab
A=[0 1 1 1 1; % 跟随者1与领航者(第5行)、其他跟随者通信
0 0 0 0 1; % 跟随者2仅与领航者通信
0 0 0 1 1; % 跟随者3与领航者、跟随者4通信
0 0 1 0 1; % 跟随者4与领航者、跟随者3通信
0 0 0 0 0]; % 领航者无上级节点
矩阵元素A(i,j)=1表示机器人i可接收机器人j的位置信息,是编队协同的基础。 - 领航者控制逻辑:
1. 目标趋近:计算领航者到目标点的距离与角度,当距离>2m时固定距离为2m,通过Vx(N,k+1)=KNdistancecos(th)、Vy(N,k+1)=KNdistancesin(th)生成朝目标点的基础速度;
2. 避障调整:调用computerepulsion.m计算障碍物(含攻击者)的斥力,通过beta*repulsion叠加到基础速度,实现避障;
3. 局部极小值逃逸:当距离目标点>0.1m且速度接近零(|Vx|≤0.1、|V_y|≤0.1)时,施加-1~1的随机速度,避免机器人陷入“无合力”区域。 - 攻击者建模与控制:
1. 目标追踪:计算编队中心(所有机器人位置平均值)或特定目标(通过q循环切换攻击对象),生成攻击者的目标位置posexattpurpose/poseyattpurpose;
2. 避障适配:将正常机器人与静态障碍物视为避障对象,调用computerepulsion.m计算斥力(探测半径attdetect_R=0.6m),调整自身速度避免碰撞;
3. 动态调整:当编队误差之和(attmse(6,:))超过阈值时,切换攻击目标,模拟动态攻击行为。 - 跟随者协同控制:
1. 编队误差计算:遍历邻居机器人,通过sumdeltax=sum(A(i,j)((posex(j,k)-posex(i,k))-(deltax(j)-deltax(i))))计算位置偏差,确保跟随者与邻居保持理想相对位置;
2. 速度合成:跟随者速度由三部分组成——领航者速度分量(K0Vx(N,k))、编队协同速度(gamaerrordistancecos(th))、避障斥力速度(beta*repulsion);
3. 运动学约束:调用confine.m限制速度增量,更新位姿与航向角,确保编队运动稳定。 - 攻击检测与应对:
1. 误差监测:通过attmse矩阵记录各机器人位置误差与理想值(0.2)的偏差,当误差之和>0.3时判定编队受攻击;
2. 拓扑重构:攻击发生后(flag_att=1),重新定义邻接矩阵A与领航者角色(N=1),调整跟随者通信关系;
3. 攻击识别:通过normalization.m归一化误差数据,调用SVM模型(预留label=svm(1)接口)识别受攻击机器人,标记后调整控制策略。
2. 关键变量说明
| 变量名称 | 作用 | 关键取值 |
|---|---|---|
deltax/deltay |
跟随者相对领航者的理想位置偏差 | 初始为[-1.5,-3,-1.5,-3,0]/[1.5,1.5,-1.5,-1.5,0],决定初始编队队形 |
beta |
斥力影响因子 | 取值10,控制避障力度,过大会导致运动震荡 |
gama |
编队协同因子 | 取值0.5,影响跟随者对编队误差的响应速度 |
attmse |
攻击检测误差矩阵 | 6行(4跟随者+1领航者+1误差和),记录误差偏离值,用于攻击判定 |
(三)仿真演示模块:功能验证载体
仿真演示模块包含demo1.m~demo4.m,针对不同应用场景设计可直接运行的案例,验证核心算法的有效性,同时提供可视化结果与数据输出。
| 文件名称 | 核心场景 | 特色功能与参数配置 |
|---|---|---|
| demo1.m | 基础编队避障 | 1. 无攻击场景,验证编队稳定性与静态避障能力; 2. 障碍物设置为 [10,9;10,14;13,12],运动学参数为最大速度0.7m/s、最大加速度0.4m/s²;3. 输出运动轨迹图、位置误差曲线,计算仿真耗时,量化编队精度 |
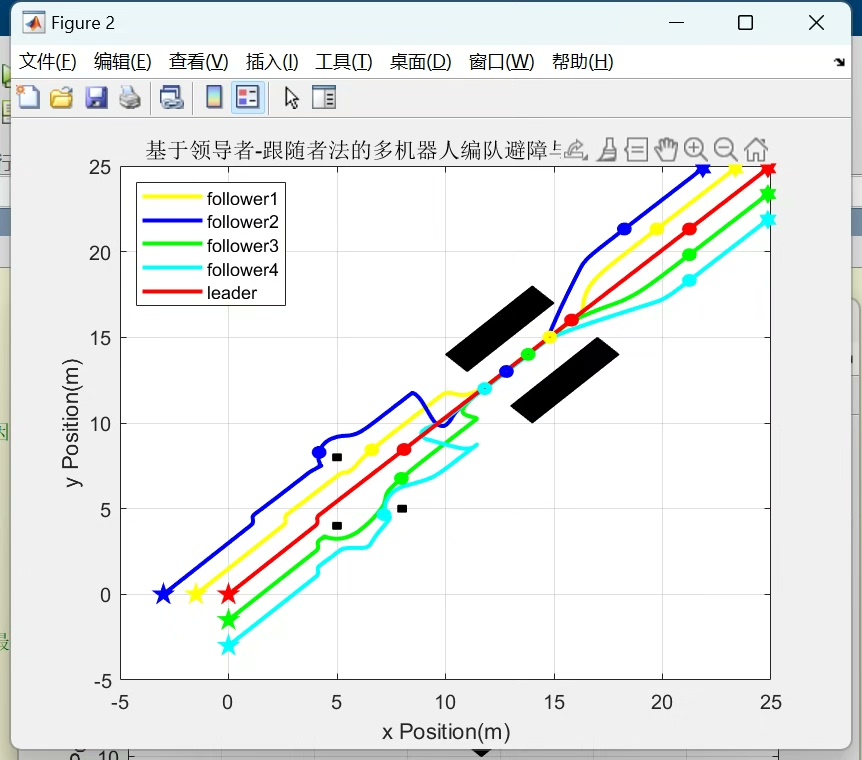
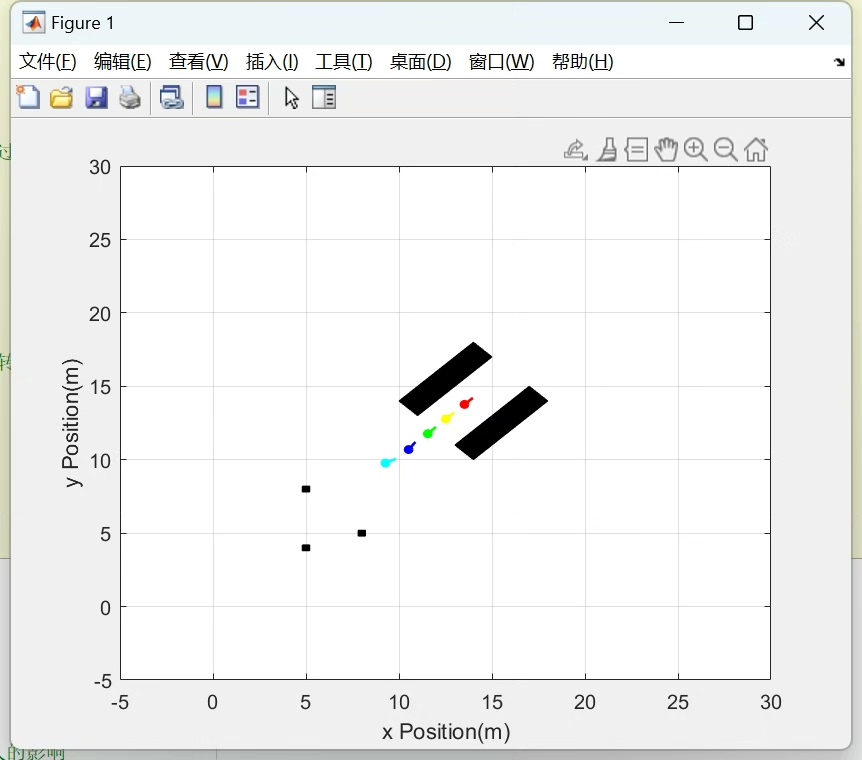
| demo2.m | 队形动态切换 | 1. 设定count=415时切换为deltax=[-1,-3,-2,-4,0]/deltay=[-1,-3,-2,-4,0],count=620时恢复初始队形;2. 新增矩形障碍物(通过 fill函数绘制黑色填充区域),提升避障场景复杂度;3. 到达目标点后驻停100步( m_count>100),验证队形保持稳定性 |
| demo3.m | 领导者-跟随者优化 | 1. 优化邻接矩阵,强化领航者主导作用(跟随者主要接收领航者信息); 2. 障碍物设置为 [5,4;5,8;8,5],验证稀疏障碍物场景下的编队控制;3. 记录路径中关键节点(300/570/760步)的机器人位置,直观展示队形切换过程 |
| demo4.m | 多障碍物复杂场景 | 1. 障碍物数量增加到4个([3,3;10,9;10,14;13,12]),模拟密集障碍环境;2. 增大斥力影响因子 beta=25,确保避障反应及时;3. 输出多组关键节点轨迹(180/490/650步),验证算法在复杂环境下的鲁棒性 |
三、核心算法原理深度解析
(一)改进人工势场法:突破传统算法局限
传统人工势场法存在局部极小值(机器人陷入引力与斥力平衡的“死区”)和目标不可达(目标点附近斥力叠加导致无法靠近)问题,本代码通过三重改进实现优化:
1. 斥力公式优化
传统斥力公式为Urep = 0.5eta(1/distance - 1/detectR)²(距离≤detect_R时),存在近距离斥力增长平缓的问题。本代码采用改进公式:
temp=1.0*(1/distance-1/detect_R)/(distance³)*(distance⁵)化简后为temp= (1/distance - 1/detect_R)*distance²,斥力随距离减小呈二次函数增长,确保近距离时避障力度充足,避免机器人与障碍物碰撞。
2. 局部极小值主动逃逸
当机器人满足“距离目标点>0.1m”且“速度接近零”时,判定陷入局部极小值,通过施加-1+2*rand(1)的随机速度(x/y方向独立),打破引力与斥力的平衡,帮助机器人脱离“死区”。该策略无需额外传感器,仅通过运动状态判断,实现简单且高效。
3. 合力合成策略
机器人最终速度由“目标引力”“编队协同力”“避障斥力”三部分合成:
- 领航者:以“目标引力”为主,“避障斥力”为辅,确保朝目标点运动的同时规避障碍;
- 跟随者:以“编队协同力”为主,“领航者速度分量”保证跟随性,“避障斥力”避免碰撞,三者权重通过
K0/gama/beta调节,兼顾编队稳定性与灵活性。
(二)领航者-跟随者拓扑:实现高效编队协同
1. 拓扑结构优势
相较于“分布式无领航者”结构,领航者-跟随者拓扑具有两大优势:
- 决策集中:领航者负责目标路径规划与避障决策,跟随者仅需跟随邻居与领航者,降低计算复杂度;
- 队形可控:通过
deltax/deltay定义相对位置,可灵活切换直线、矩形、菱形等队形,适配不同场景需求。
2. 队形保持机制
跟随者通过“邻居位置误差反馈”维持队形:
- 计算自身与邻居机器人的实际位置差(
posex(j,k)-posex(i,k)); - 减去理想位置差(
deltax(j)-deltax(i)),得到位置偏差; - 基于偏差生成协同速度,通过
gama调节响应强度,确保偏差快速收敛到零。
(三)攻击检测与应对:提升系统鲁棒性
1. 攻击判定逻辑
通过“误差偏离度”量化攻击影响:
- 计算各机器人位置误差与理想误差(0.2)的绝对偏差(
abs(att_mse(j)-0.2)); - 求和得到编队总偏差(
attmse(6,:)); - 当总偏差>0.3时,判定编队受到攻击,触发应对策略。
2. 自适应应对策略
- 拓扑重构:重新定义邻接矩阵,切断受攻击机器人与其他机器人的通信,避免攻击扩散;
- 角色切换:将未受攻击的机器人设为新领航者(如
N=1),维持编队控制中枢; - 数据归一化:通过
normalization.m将误差数据映射到[0,1],为SVM模型提供标准化输入,精准识别受攻击对象。
四、仿真流程与结果分析
(一)仿真核心流程(以demo1.m为例)
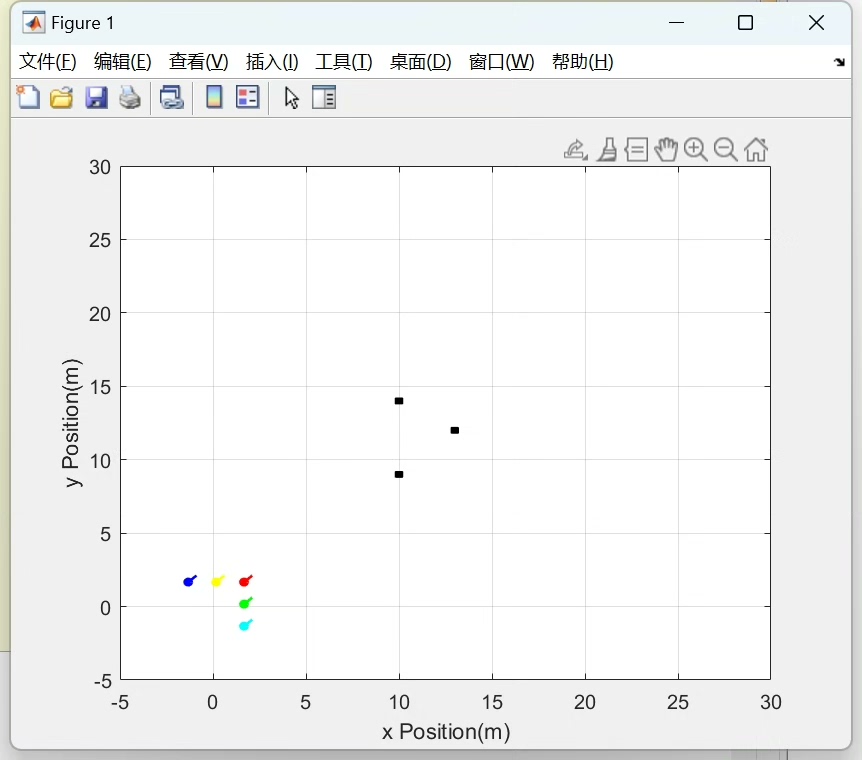
- 初始化阶段(1~50行):
- 配置机器人数量、迭代次数、时间步长、运动学参数、目标点、障碍物坐标;
- 定义初始位姿(initf)、相对位置偏差(deltax/deltay)、初始速度(Vx/V_y);
- 设置颜色(color='ybgcrkr')、线型(type=[2,1,0.5,0.5,2,2])等可视化参数。
- 循环迭代阶段(51~200行):
- 领航者控制:计算朝目标点的速度,叠加避障斥力,处理局部极小值;
- 跟随者控制:计算邻居位置偏差,合成协同速度与避障速度,调用confine.m限制速度;
- 位姿更新:根据约束后速度更新机器人x/y坐标与航向角(poseth=atan2(Vy,Vx));
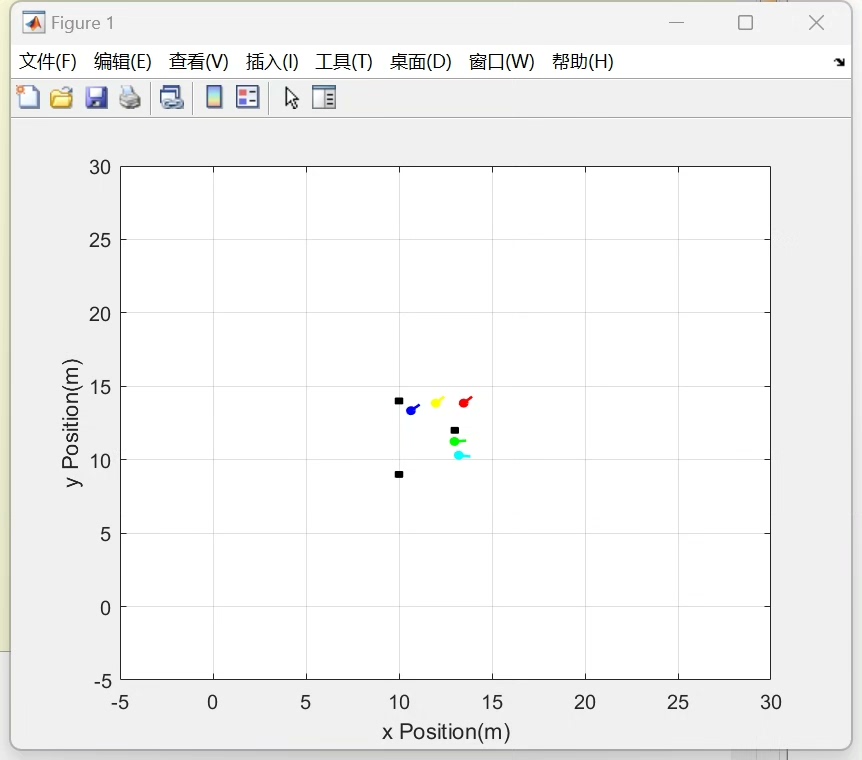
- 可视化绘制:调用quiver绘制机器人航向箭头,drawcircle绘制机器人轮廓,draw_square绘制障碍物,axis(area)固定视口,drawnow实时更新动画;
- 终止判断:当领航者到目标点距离<0.2m时,输出“Arrive Goal!!”并结束循环。
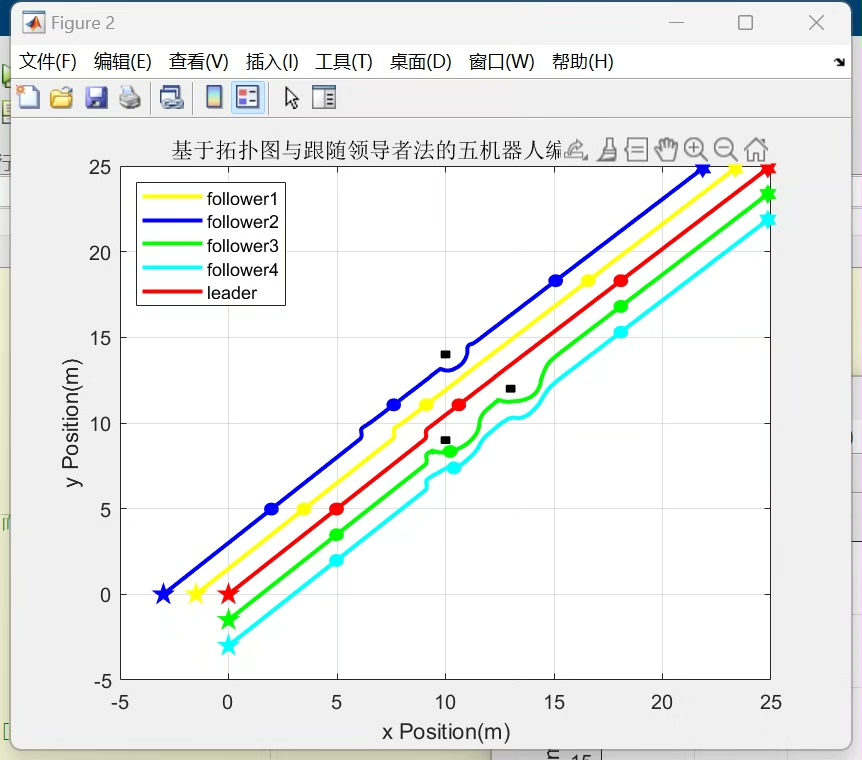
- 结果输出阶段(201~250行):
- 绘制机器人运动轨迹图(标记起点、关键节点、终点);
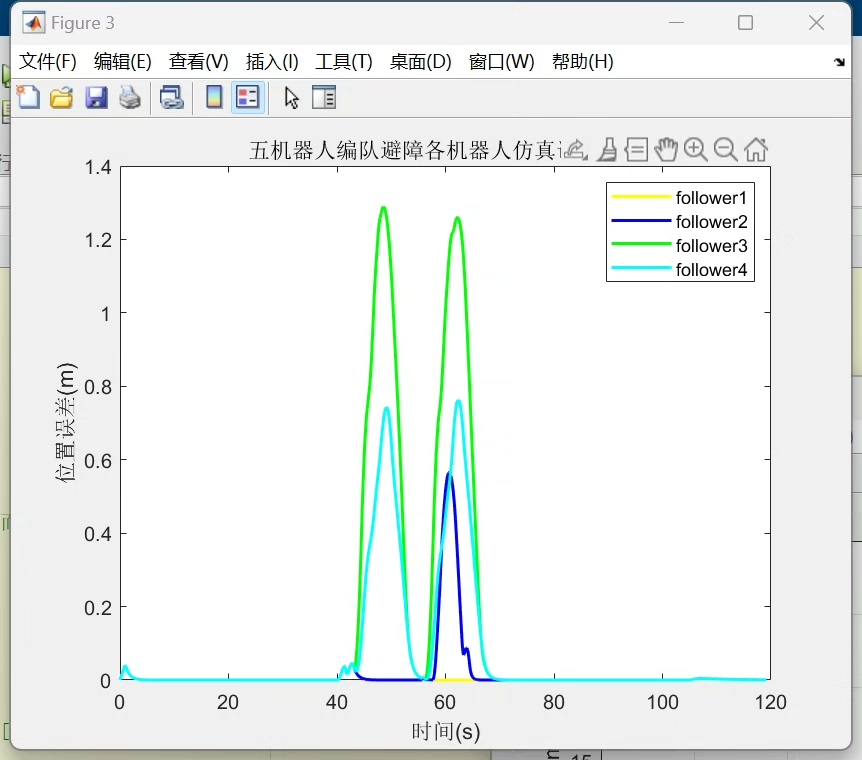
- 计算并绘制位置误差曲线(error=sqrt(errorx.²+errory.²));
- 保存误差数据(attmse.mat),便于后续分析。
(二)关键结果指标
- 编队精度:通过
cal_mse.m计算跟随者与理想位置的偏差,稳定后误差应<0.1m,说明编队精度达标; - 避障效果:机器人运动轨迹应绕开障碍物,无碰撞发生,且避障后能快速恢复编队队形;
- 收敛速度:仿真迭代次数应<1500步(时间<150s),说明控制算法响应迅速,无明显震荡;
- 攻击应对:defend.m中攻击发生后,编队总误差(
attmse(6,:))应快速下降,新领航者能正常引导编队向目标点运动。
五、代码特色与扩展方向
(一)核心特色
- 算法创新性:改进人工势场法解决传统算法的局部极小值问题,结合领航者-跟随者拓扑,兼顾编队稳定性与避障灵活性;
- 场景覆盖全面:从基础避障到队形切换,从无攻击环境到攻击检测,覆盖多机器人编队控制的核心场景;
- 模块化程度高:工具函数与核心逻辑分离,可单独调用(如
compute_repulsion.m可复用于其他避障项目),便于维护与扩展; - 可视化丰富:支持机器人航向、探测范围、障碍物、运动轨迹、误差曲线等多维度可视化,直观展示算法效果。
(二)扩展方向
- 动态障碍物适配:在循环中实时更新
obtemp矩阵(如随机生成移动障碍物坐标),结合detect2.m实现动态避障; - 多目标路径规划:修改领航者目标点设置,支持多目标点依次运动(如从
[10,10]到[20,20]再到[30,10]); - 智能攻击检测优化:完善SVM模型训练流程(添加训练数据生成、模型验证模块),提高攻击识别准确率;
- 3D场景扩展:增加
z轴维度,扩展compute_repulsion.m、motion.m等函数,实现3D空间内的多机器人编队控制; - 硬件联调适配:将Matlab代码转换为C++代码,结合ROS(机器人操作系统),实现与实体机器人的联调,验证算法在实际场景中的有效性。
六、使用建议与注意事项
(一)运行环境要求
- 软件:Matlab R2018b及以上版本(需支持
quiver、fill、save等基础函数,无需额外工具箱); - 硬件:CPU i5及以上,内存8GB及以上(确保大规模迭代时运行流畅)。
(二)参数调整建议
- 障碍物密集场景:增大
beta(如25)和detect_R(如1.2m),增强避障反应;减小gama(如0.65),避免编队震荡; - 队形切换场景:延长队形切换时间窗口(如
count=400~600),逐步调整deltax/deltay,避免队形突变; - 局部极小值频发场景:增大随机扰动幅度(如
-1.5+3*rand(1)),或减小detect_R(如0.8m),降低斥力叠加导致的“死区”概率。
(三)常见问题解决
- 机器人碰撞:检查
detect_R是否过小(应≥1m),beta是否过小(应≥13),确保斥力足够; - 编队溃散:检查
gama是否过小(应≥0.5),confine函数中最大加速度是否过大(应≤0.4m/s²),避免速度突变; - 仿真卡顿:减小
countmax(如1500),或降低可视化更新频率(如每5步更新一次动画)。
七、总结
本套代码基于改进人工势场法与领航者-跟随者拓扑,构建了一套完整的多机器人编队避障控制方案,涵盖算法设计、代码实现、仿真验证全流程。代码架构清晰、算法鲁棒性强、场景适配性广,可作为多机器人系统研发的基础框架,适用于无人机编队、地面机器人协同作业、仓储机器人调度等领域。通过扩展动态障碍物、智能攻击检测、硬件联调等模块,可进一步提升代码的工程应用价值,为实际多机器人项目提供技术支撑。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 9
9 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)