VS 对 Fanuc 工业机器人 SDK 二次开发:C# 上位机集成发那科机械手臂 ROBOGUIDE 仿真之旅
这次利用 Visual Studio 2019 对 Fanuc 工业机器人 SDK 二次开发实现的 C# 上位机集成了众多实用功能。虽然代码已加密,不过分享了各个功能实现的大致思路和关键代码片段。希望能给同样在工业自动化开发领域探索的朋友们一些启发,一起推动工业自动化的发展。
VS对Fanuc工业机器人SDK二次开发C# 上位机集成发那科机械手臂ROBOGUIDE仿真 开发软件:Visual Studio 2019 开发包:发那科官网robot interfaceV3.0开发包 功能: - 读写200个数值寄存器和注释 - 读写100个位置寄存器和注释 - 读写25个字符串寄存器和注释 - 实时读取:大地/关节/工件坐标 - 实时读取:机器人日志,当前状态,6个轴的扭矩 - 读写512个:DI/DO,300个:GI/GO信号和注释 - 发工作站和项目源码,代码已加密
在工业自动化领域,Fanuc 工业机器人凭借其高精度和可靠性占据着重要地位。今天就来聊聊如何利用 Visual Studio 2019 对 Fanuc 工业机器人 SDK 进行二次开发,打造一个集成发那科机械手臂 ROBOGUIDE 仿真的 C# 上位机。
前期准备
开发软件我们选用 Visual Studio 2019,而开发包则从发那科官网获取 robot interfaceV3.0 开发包。这个开发包是我们后续开发的基石,它提供了一系列接口和工具,让我们能够与 Fanuc 机器人进行交互。
功能实现解析
寄存器读写
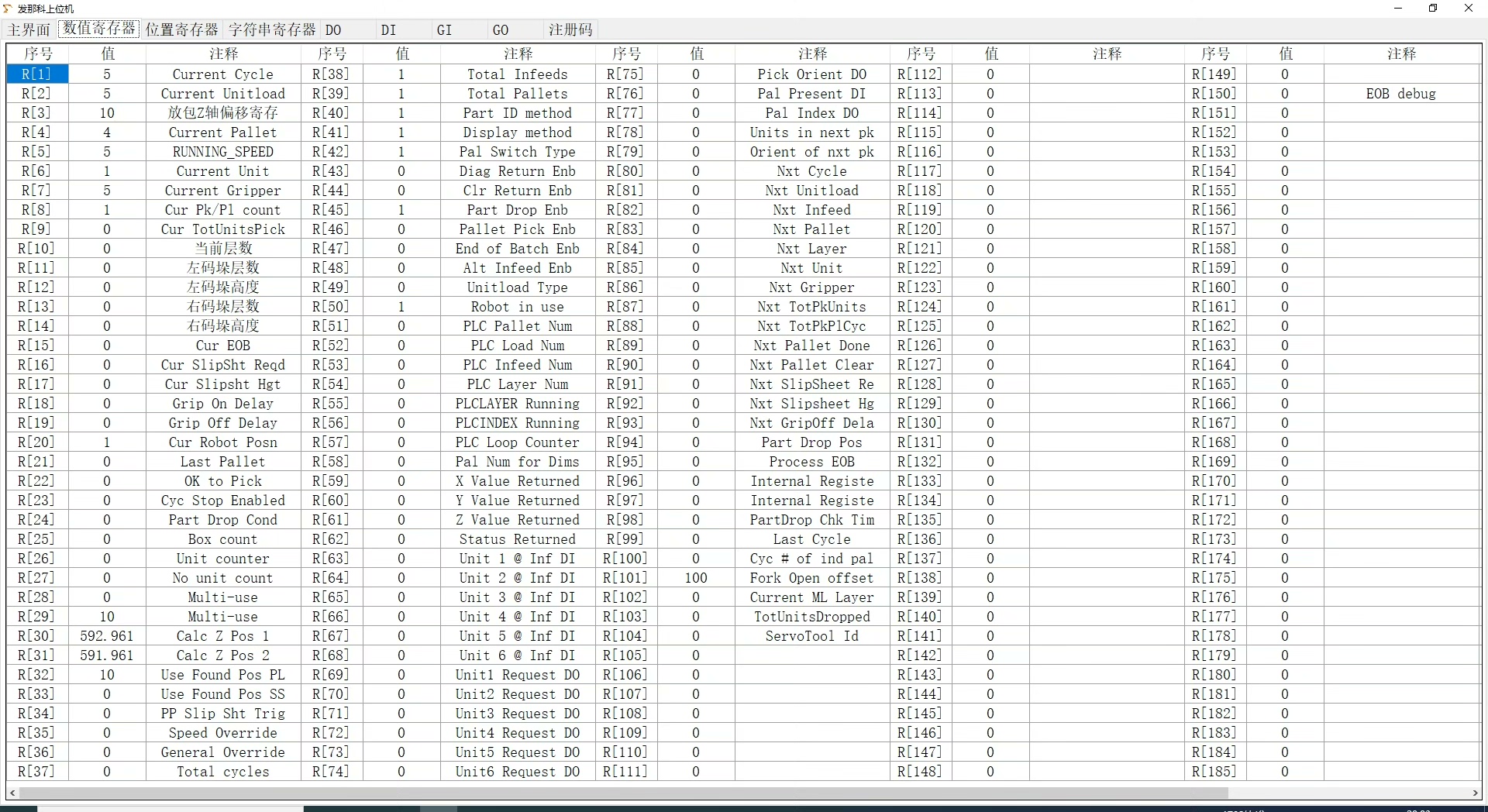
- 数值寄存器读写
我们要实现读写 200 个数值寄存器和注释。在 C# 中,借助开发包提供的接口,代码大概像这样:
// 假设已经建立好与机器人的连接 robotConnection
// 读取数值寄存器
for (int i = 1; i <= 200; i++)
{
double value = robotConnection.ReadNumericRegister(i);
string comment = robotConnection.ReadNumericRegisterComment(i);
Console.WriteLine($"数值寄存器 {i} 的值: {value}, 注释: {comment}");
}
// 写入数值寄存器
for (int i = 1; i <= 200; i++)
{
double writeValue = i * 1.5; // 这里简单示例写入值
robotConnection.WriteNumericRegister(i, writeValue);
string writeComment = $"这是数值寄存器 {i} 的注释";
robotConnection.WriteNumericRegisterComment(i, writeComment);
}在这段代码里,首先通过循环读取每个数值寄存器的值及其注释并输出。写入部分则是为每个寄存器赋予一个简单计算后的值,并添加自定义注释。
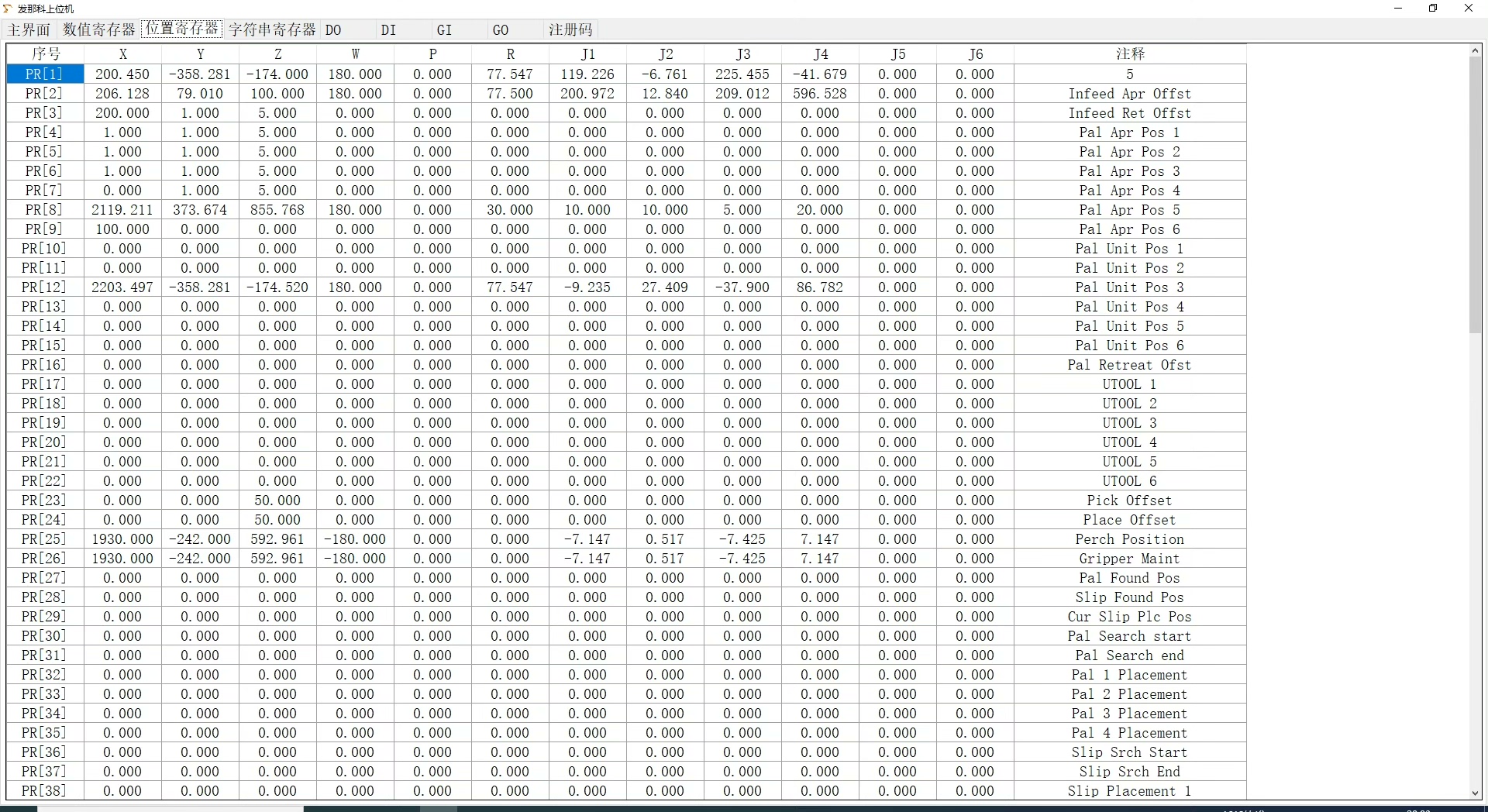
- 位置寄存器读写
读写 100 个位置寄存器和注释的实现思路类似:
// 读取位置寄存器
for (int i = 1; i <= 100; i++)
{
Position position = robotConnection.ReadPositionRegister(i);
string comment = robotConnection.ReadPositionRegisterComment(i);
Console.WriteLine($"位置寄存器 {i} 的位置: {position.X}, {position.Y}, {position.Z}, 注释: {comment}");
}
// 写入位置寄存器
for (int i = 1; i <= 100; i++)
{
Position writePosition = new Position { X = i * 10, Y = i * 20, Z = i * 30 }; // 简单示例位置
robotConnection.WritePositionRegister(i, writePosition);
string writeComment = $"这是位置寄存器 {i} 的注释";
robotConnection.WritePositionRegisterComment(i, writeComment);
}这里假设 Position 是表示位置的结构体,包含 X、Y、Z 坐标。同样通过循环实现位置寄存器的读写及注释操作。
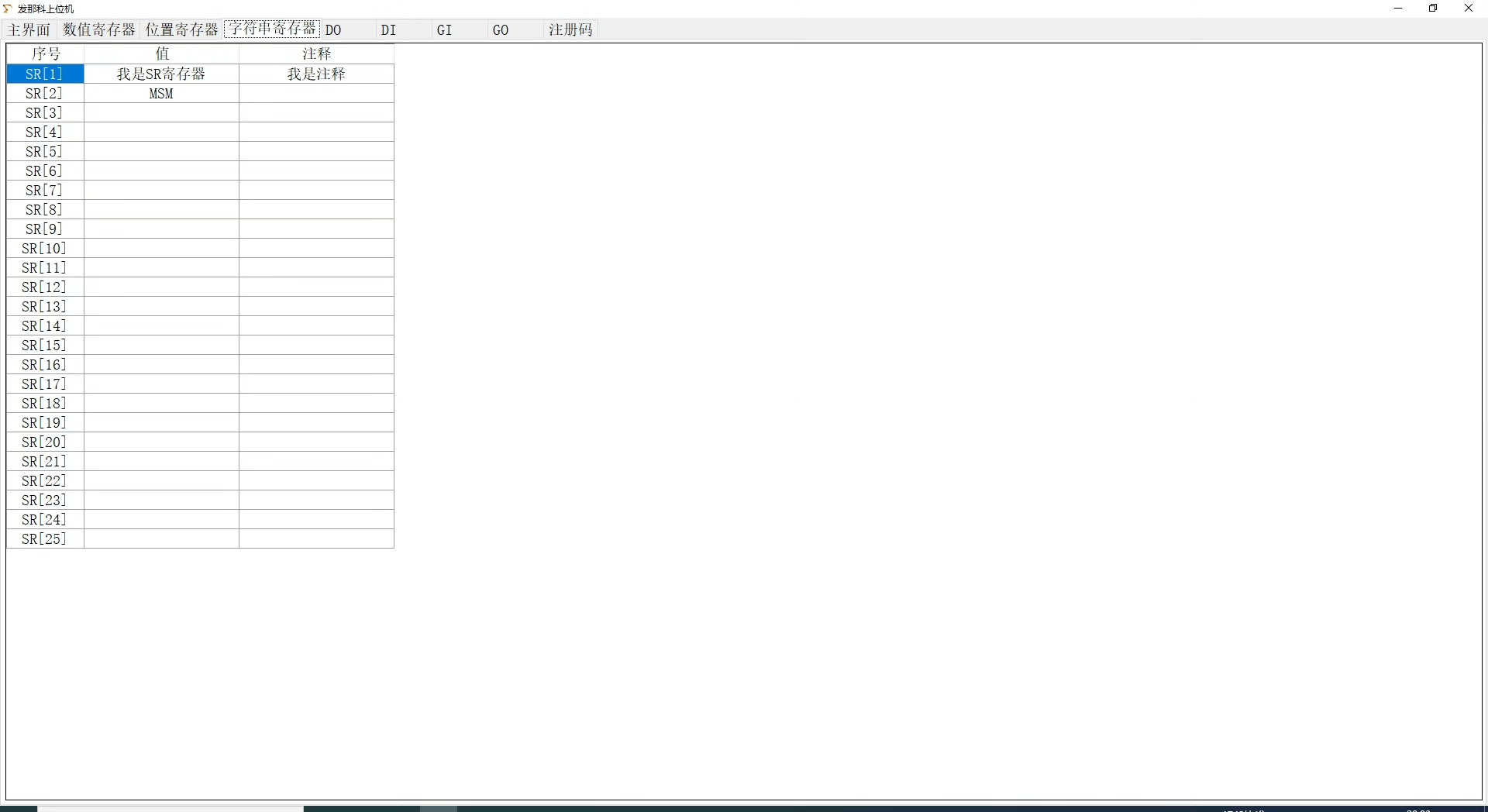
- 字符串寄存器读写
读写 25 个字符串寄存器和注释:
// 读取字符串寄存器
for (int i = 1; i <= 25; i++)
{
string value = robotConnection.ReadStringRegister(i);
string comment = robotConnection.ReadStringRegisterComment(i);
Console.WriteLine($"字符串寄存器 {i} 的值: {value}, 注释: {comment}");
}
// 写入字符串寄存器
for (int i = 1; i <= 25; i++)
{
string writeValue = $"字符串值 {i}";
robotConnection.WriteStringRegister(i, writeValue);
string writeComment = $"这是字符串寄存器 {i} 的注释";
robotConnection.WriteStringRegisterComment(i, writeComment);
}代码逻辑与前面寄存器读写相似,只是针对字符串类型的数据进行操作。
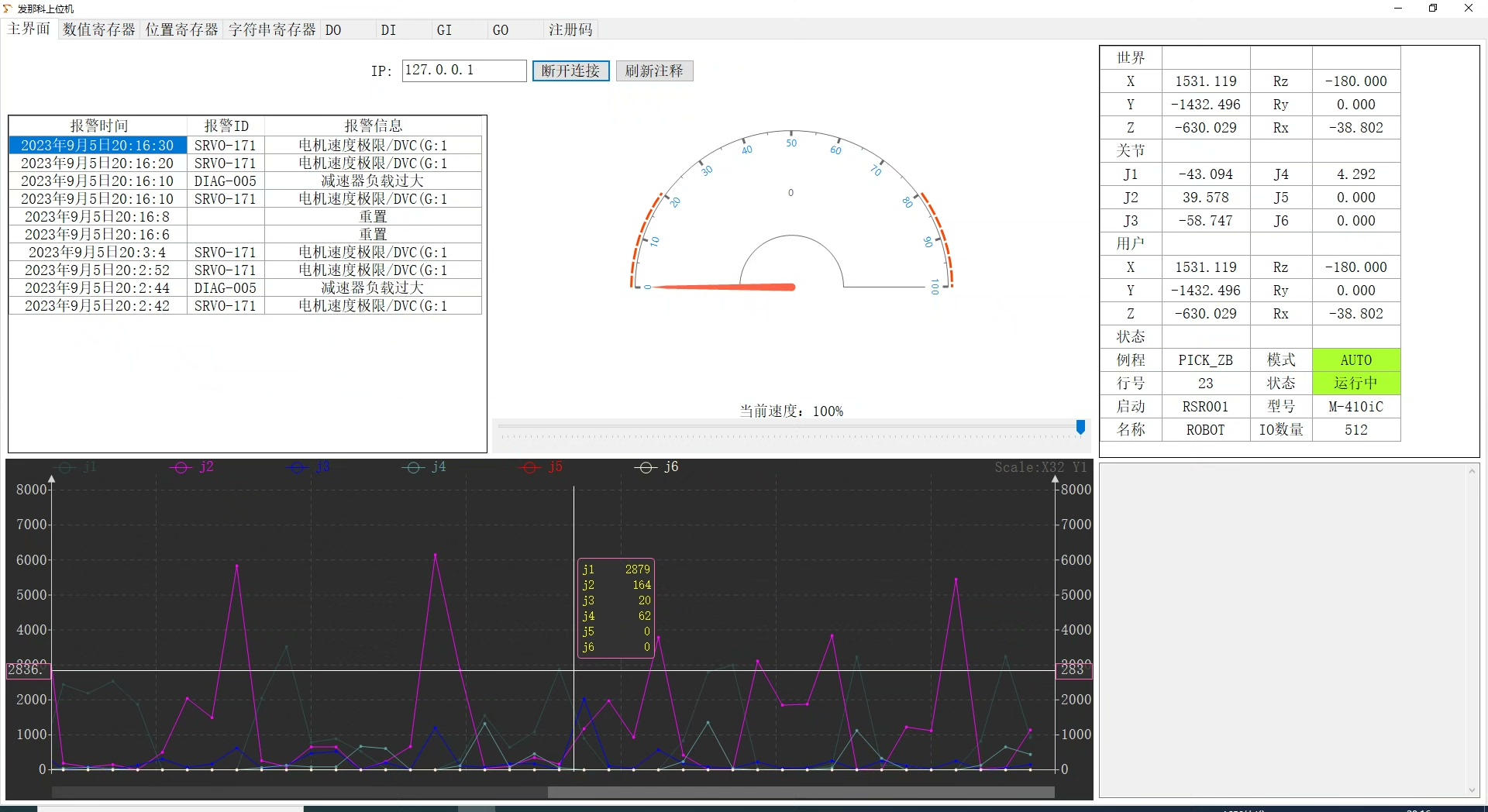
实时读取
- 坐标实时读取
实时读取大地/关节/工件坐标:
while (true)
{
// 读取大地坐标
CartesianCoordinates worldCoords = robotConnection.ReadWorldCoordinates();
Console.WriteLine($"大地坐标: X={worldCoords.X}, Y={worldCoords.Y}, Z={worldCoords.Z}");
// 读取关节坐标
JointCoordinates jointCoords = robotConnection.ReadJointCoordinates();
Console.WriteLine($"关节坐标: J1={jointCoords.J1}, J2={jointCoords.J2}, J3={jointCoords.J3}, J4={jointCoords.J4}, J5={jointCoords.J5}, J6={jointCoords.J6}");
// 读取工件坐标
CartesianCoordinates workpieceCoords = robotConnection.ReadWorkpieceCoordinates();
Console.WriteLine($"工件坐标: X={workpieceCoords.X}, Y={workpieceCoords.Y}, Z={workpieceCoords.Z}");
System.Threading.Thread.Sleep(1000); // 每秒读取一次
}这段代码通过一个无限循环,每秒读取一次不同类型的坐标,并输出到控制台。
- 其他实时信息读取
实时读取机器人日志,当前状态,6 个轴的扭矩:
while (true)
{
string log = robotConnection.ReadRobotLog();
Console.WriteLine($"机器人日志: {log}");
RobotStatus status = robotConnection.ReadRobotStatus();
Console.WriteLine($"机器人当前状态: {status.StatusCode}");
Torque[] torques = robotConnection.ReadAxisTorques();
Console.WriteLine($"轴扭矩: J1={torques[0].Value}, J2={torques[1].Value}, J3={torques[2].Value}, J4={torques[3].Value}, J5={torques[4].Value}, J6={torques[5].Value}");
System.Threading.Thread.Sleep(2000); // 每两秒读取一次
}同样是通过循环实时获取这些信息,这里假设 RobotStatus 结构体存储机器人状态码,Torque 结构体存储轴扭矩信息。
信号读写
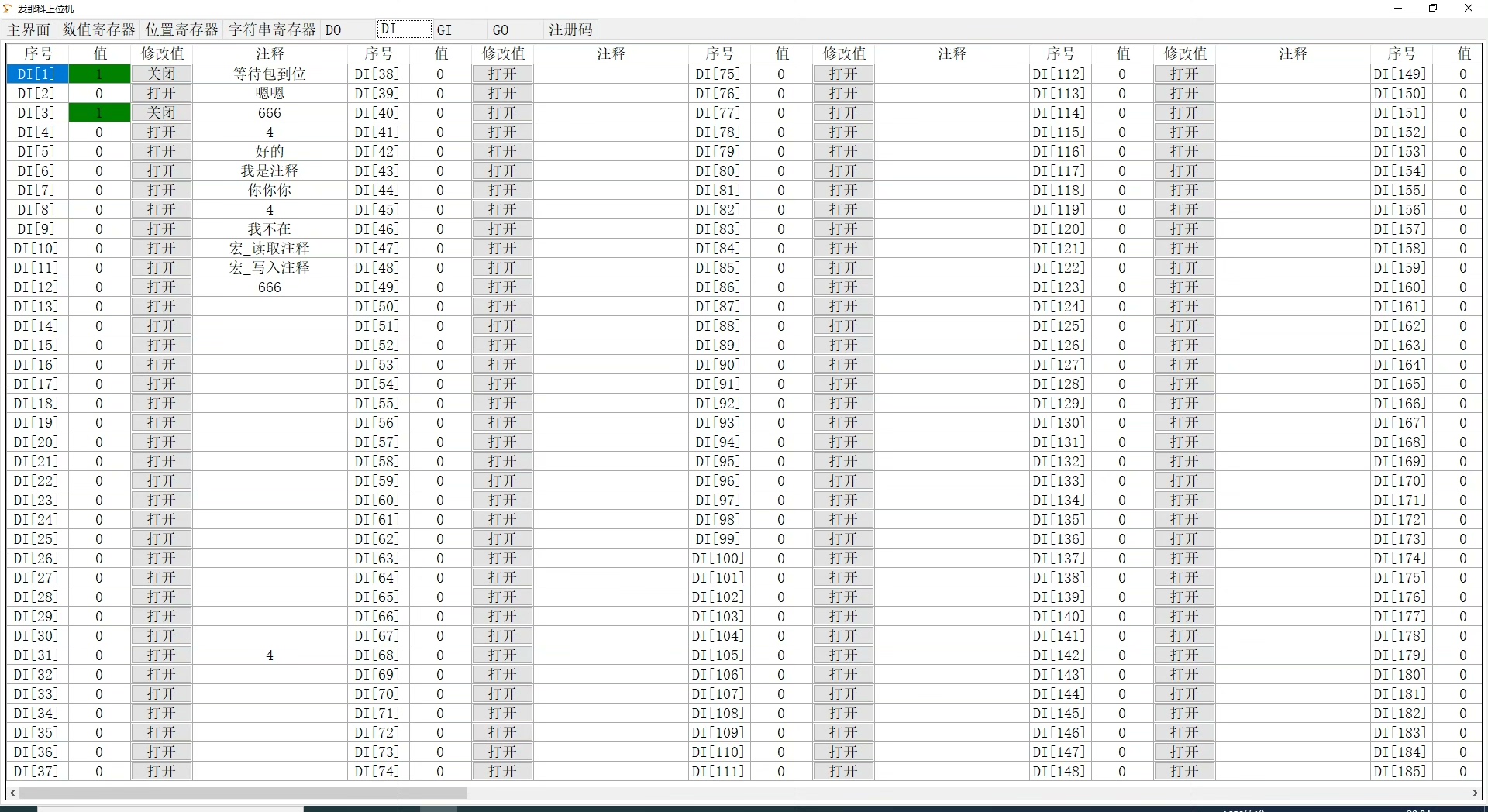
- DI/DO 信号读写
读写 512 个 DI/DO 信号和注释:
// 读取 DI 信号
for (int i = 1; i <= 512; i++)
{
bool diValue = robotConnection.ReadDigitalInput(i);
string diComment = robotConnection.ReadDigitalInputComment(i);
Console.WriteLine($"DI 信号 {i}: {diValue}, 注释: {diComment}");
}
// 写入 DO 信号
for (int i = 1; i <= 512; i++)
{
bool doValue = i % 2 == 0; // 简单示例写入值
robotConnection.WriteDigitalOutput(i, doValue);
string doComment = $"这是 DO 信号 {i} 的注释";
robotConnection.WriteDigitalOutputComment(i, doComment);
}通过循环实现对 DI/DO 信号的读写及注释操作。
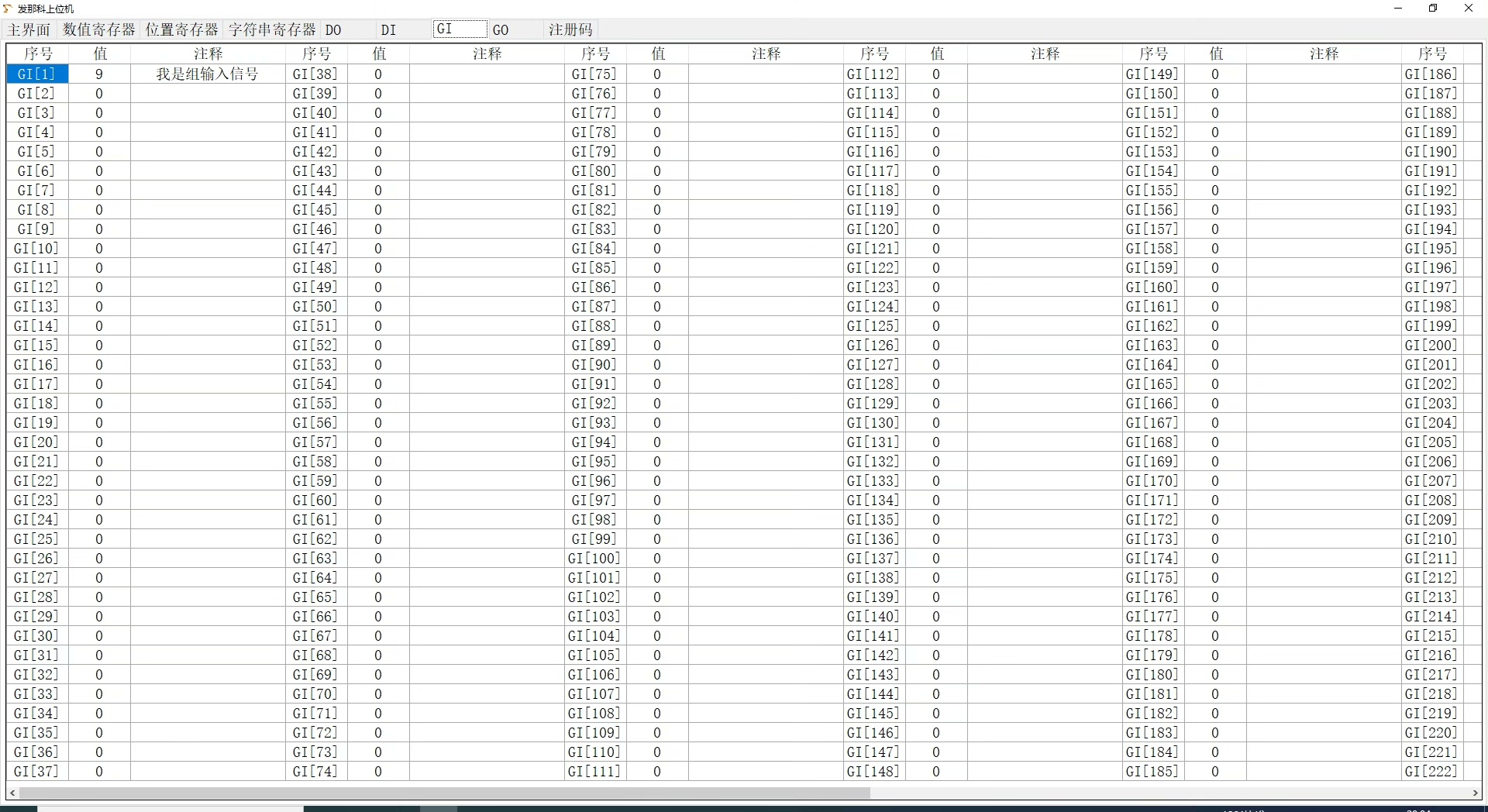
- GI/GO 信号读写
读写 300 个 GI/GO 信号和注释:
// 读取 GI 信号
for (int i = 1; i <= 300; i++)
{
bool giValue = robotConnection.ReadGroupInput(i);
string giComment = robotConnection.ReadGroupInputComment(i);
Console.WriteLine($"GI 信号 {i}: {giValue}, 注释: {giComment}");
}
// 写入 GO 信号
for (int i = 1; i <= 300; i++)
{
bool goValue = i % 3 == 0; // 简单示例写入值
robotConnection.WriteGroupOutput(i, goValue);
string goComment = $"这是 GO 信号 {i} 的注释";
robotConnection.WriteGroupOutputComment(i, goComment);
}与 DI/DO 信号读写类似,只是针对 GI/GO 信号进行操作。
总结
这次利用 Visual Studio 2019 对 Fanuc 工业机器人 SDK 二次开发实现的 C# 上位机集成了众多实用功能。虽然代码已加密,不过分享了各个功能实现的大致思路和关键代码片段。希望能给同样在工业自动化开发领域探索的朋友们一些启发,一起推动工业自动化的发展。
VS对Fanuc工业机器人SDK二次开发C# 上位机集成发那科机械手臂ROBOGUIDE仿真 开发软件:Visual Studio 2019 开发包:发那科官网robot interfaceV3.0开发包 功能: - 读写200个数值寄存器和注释 - 读写100个位置寄存器和注释 - 读写25个字符串寄存器和注释 - 实时读取:大地/关节/工件坐标 - 实时读取:机器人日志,当前状态,6个轴的扭矩 - 读写512个:DI/DO,300个:GI/GO信号和注释 - 发工作站和项目源码,代码已加密

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)