四足式移动机器人结构设计
本文设计了一款轻量化四足移动机器人,针对工业巡检、抢险救援等复杂场景需求,采用碳纤维躯干和三自由度腿部结构,实现机身质量≤8kg、负载≥2kg的性能指标。通过SolidWorks三维建模和ANSYS强度分析,优化关节设计与步态规划,样机测试显示其可稳定行走(0.55m/s)、攀爬28°斜坡并越障8cm。该设计兼具运动灵活性与结构稳定性,适用于巡检、运输等场景,未来可通过传感器集成和功能扩展进一步提
四足式移动机器人结构设计
一、设计背景与意义
在工业巡检、抢险救援、科研探索等复杂场景中,移动机器人需具备较强的地形适应性与运动灵活性,以替代人工完成危险或复杂环境下的作业任务。相较于轮式、履带式机器人,四足式移动机器人凭借多关节协同运动特性,在非结构化地形(如崎岖路面、台阶、沟壑)中具有更强的通行能力,成为移动机器人领域的研究热点。
传统四足机器人存在结构笨重、运动稳定性不足、负载能力有限等问题,难以适配实际应用场景的多元化需求。本设计针对中小型四足机器人的实用化需求,优化机身结构与腿部关节设计,实现机器人轻量化、高稳定性与强适应性的统一,可应用于室内外巡检、轻载运输、科研教学等场景。该设计对推动四足移动机器人的工程化应用、拓展移动机器人的作业范围具有重要的工程价值与实用意义。
二、整体结构与关节设计
(一)设计目标与性能指标
- 核心设计目标:兼顾运动灵活性与结构稳定性,实现行走、转弯、爬坡、越障等基本动作;
- 性能指标:机身质量≤8kg,负载能力≥2kg;最大行走速度≥0.5m/s;爬坡角度≤30°;越障高度≤10cm;单关节最大扭矩≥5N·m;连续工作时间≥2小时。
(二)整体结构设计
采用“躯干-腿部”模块化结构,机身对称布局以保证运动平衡:
- 躯干结构:选用碳纤维复合材料(厚度3mm)制成矩形框架,尺寸为400mm×300mm×120mm,既减轻重量又保证结构强度;躯干中部预留安装空间,用于放置控制器、电池、传感器等核心部件;底部设计防滑减震垫,减少落地冲击对内部元件的影响。
- 腿部结构:四肢对称分布于躯干两侧,每侧前后腿间距250mm,左右腿间距200mm;单条腿部采用三自由度设计(髋关节、膝关节、踝关节),适配多姿态运动需求,关节布置采用“髋-膝-踝”串联结构,模仿哺乳动物腿部运动机理。
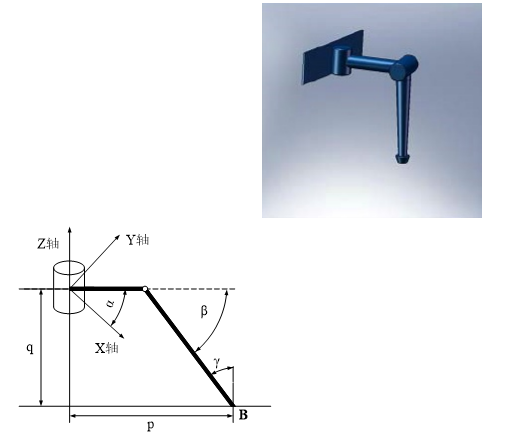
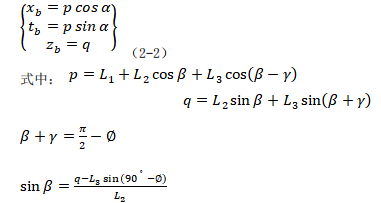
(三)关节设计与运动学分析
- 关节自由度分配:
- 髋关节:2个自由度(前后摆动、左右摆动),实现腿部的横向与纵向摆动,扩大运动范围;
- 膝关节:1个自由度(弯曲/伸展),主要提供腿部的支撑与蹬地动力;
- 踝关节:1个自由度(俯仰摆动),用于调节脚掌与地面的接触角度,提升地形适应性。
- 腿部连杆尺寸优化:基于运动学正逆解分析,优化连杆长度:大腿连杆长度120mm,小腿连杆长度100mm,脚掌长度80mm,确保关节运动无干涉,且机器人步态流畅。
- 步态规划:采用三角步态作为基本行走步态(同侧前后腿交替支撑,异侧腿协同摆动),通过关节角度协同控制,实现机器人平稳移动;爬坡与越障时切换为对角步态,提升支撑稳定性。
三、关键部件选型与结构建模
(一)核心部件选型
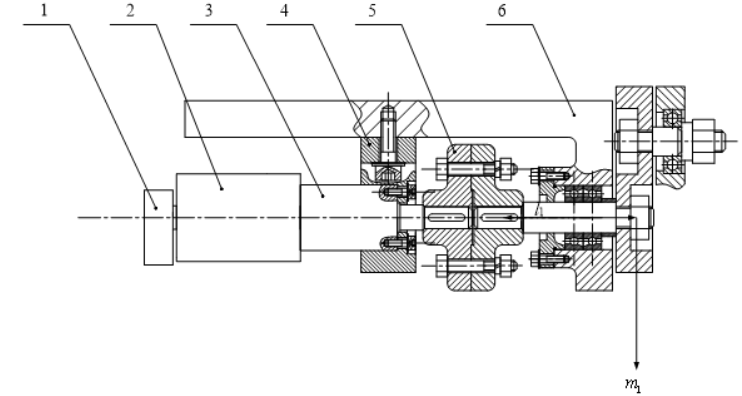
- 驱动电机:选用直流无刷伺服电机(型号DS3115),额定电压12V,额定扭矩6N·m,转速300rpm,配备256线编码器,实现关节角度精准控制;单条腿部3台电机,整机共12台电机,满足多关节协同驱动需求。
- 减速机构:采用行星齿轮减速器(传动比1:30),搭配谐波减速器(传动比1:50),总传动比1:1500,提升关节输出扭矩的同时降低转速,适配机器人缓慢平稳的运动特性。
- 脚掌设计:选用硅胶材质制成弧形脚掌(直径60mm,厚度15mm),表面设置防滑纹路,增大与地面的摩擦力;内部嵌入压力传感器,实时检测足底受力,为运动平衡控制提供数据支撑。
- 能源与控制模块:选用12V/10Ah锂电池(重量1.2kg),为整机供电;控制器选用STM32H743单片机,搭配运动控制板实现12路电机的协同控制。
(二)三维结构建模与装配
基于SolidWorks软件构建机器人整机三维模型,核心装配流程如下:
- 按设计尺寸完成各部件(躯干框架、腿部连杆、电机、减速器、脚掌)的三维建模,采用参数化设计确保部件尺寸精度;
- 进行虚拟装配,重点校核关节运动干涉情况,调整连杆长度与关节间隙(预留2mm间隙),确保各关节运动顺畅;
- 对关键部件(如腿部连杆、躯干框架)进行轻量化优化,在非受力部位开设减重孔,进一步降低机身重量。
(三)强度与刚度校核
基于ANSYS Workbench对核心结构进行有限元分析:
- 躯干强度校核:躯干承受2kg负载与自身重量时,最大应力σ_max=85MPa,小于碳纤维复合材料的许用应力[σ]=150MPa,最大变形量0.12mm,满足刚度要求;
- 腿部连杆校核:腿部支撑阶段,大腿连杆最大应力92MPa,小腿连杆最大应力88MPa,均小于铝合金(6061-T6)的许用应力[σ]=110MPa,无塑性变形风险;
- 关节强度校核:电机输出扭矩作用下,关节轴最大剪切应力65MPa,小于45号钢的许用剪切应力[τ]=80MPa,连接可靠。
四、性能仿真与应用价值分析
(一)运动仿真与测试
- 运动学仿真:基于ADAMS软件搭建机器人动力学模型,模拟三角步态行走过程,结果显示:关节角度变化平滑,无突变现象;机器人重心波动幅度≤15mm,运动稳定性良好;
- 实物测试:制作样机进行实地测试,测试结果如下:
- 平地行走:速度稳定在0.55m/s,步态流畅,无明显晃动;
- 地形适应性:成功攀爬28°斜坡,越过8cm高障碍,在碎石路面行走时未出现打滑或倾倒现象;
- 负载测试:搭载2kg重物后,运动性能无明显下降,关节响应正常;
- 续航测试:连续行走2.3小时,电池剩余电量15%,满足设计要求。
(二)应用价值与展望
- 应用价值:本设计的四足机器人结构紧凑、轻量化、运动稳定,适配多种复杂场景的作业需求,可广泛应用于室内外巡检(如厂房设备巡检、园区安防)、轻载运输(如小型物资传递)、科研教学(如机器人运动学实验)等领域。相较于传统四足机器人,其轻量化设计降低了能耗,三自由度腿部结构提升了运动灵活性,具有显著的实用优势。
- 展望:后续可从三方面优化:一是引入视觉与激光雷达传感器,实现自主导航与避障功能;二是优化关节驱动方案,采用无刷直流电机与精密减速器组合,提升控制精度;三是扩展作业功能,搭载机械臂、摄像头等外设,实现抓取、探测等复合作业。该结构设计方案为中小型四足移动机器人的研发提供了切实可行的技术路径,具有良好的市场推广前景与工程应用价值。


文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)