麻雀算法及其改进在机械臂轨迹规划中的应用探索
麻雀算法加改进麻雀,混沌映射,机械臂轨迹,配合3-5-3多项式规划,关节空间下轨迹规划,可用于六自由度,五自由度等机械臂,替换自己的DH即可在机器人领域,机械臂的轨迹规划一直是核心问题之一,它关乎机械臂能否高效、准确地完成任务。今天咱们来聊聊麻雀算法及其改进,再结合混沌映射,在关节空间下基于3 - 5 - 3多项式规划实现机械臂轨迹规划,这种方法适用于六自由度、五自由度等多种机械臂,只需要替换对应
麻雀算法加改进麻雀,混沌映射,机械臂轨迹,配合3-5-3多项式规划,关节空间下轨迹规划,可用于六自由度,五自由度等机械臂,替换自己的DH即可
在机器人领域,机械臂的轨迹规划一直是核心问题之一,它关乎机械臂能否高效、准确地完成任务。今天咱们来聊聊麻雀算法及其改进,再结合混沌映射,在关节空间下基于3 - 5 - 3多项式规划实现机械臂轨迹规划,这种方法适用于六自由度、五自由度等多种机械臂,只需要替换对应的DH参数就行。
麻雀算法基础
麻雀算法(SSA)是一种受麻雀觅食行为启发的智能优化算法。想象一下,麻雀出去找吃的,有负责找食物的发现者,也有跟在后面蹭吃的追随者,还有负责观察周围有没有危险的警戒者。
下面是简单的麻雀算法伪代码示例:
# 初始化麻雀种群位置和适应度值
def init_population(pop_size, dim):
population = np.random.rand(pop_size, dim)
fitness = np.array([fitness_function(particle) for particle in population])
return population, fitness
# 适应度函数,这里简单示例为目标函数值
def fitness_function(particle):
return np.sum(particle**2)
# 发现者位置更新
def update_leader(population, fitness, best_leader, a, ST):
r2 = np.random.rand()
if r2 < ST:
population[np.argmin(fitness)] = best_leader * np.exp(-(np.arange(len(population)) + 1) / (a * len(population)))
else:
population[np.argmin(fitness)] = best_leader + np.random.randn() * np.ones(len(population))
return population
# 追随者位置更新
def update_follower(population, fitness, best_leader):
worse_fitness_index = np.argsort(fitness)[::-1][:int(len(population) * 0.8)]
for i in worse_fitness_index:
A = np.random.choice([-1, 1], size=len(population))
A = np.linalg.inv(np.dot(A, A.T)) * A
population[i] = population[i] + np.random.rand() * np.abs(population[np.argmin(fitness)] - population[i]) * A
return population
# 警戒者位置更新
def update_scout(population, fitness, best_leader, SD):
worst_fitness_index = np.argmax(fitness)
if np.min(fitness) < SD:
population[worst_fitness_index] = best_leader + np.random.randn() * np.ones(len(population))
return population在上述代码中,initpopulation 函数初始化了麻雀种群的位置和适应度值,这里简单地把适应度函数定义为 np.sum(particle2),实际应用中需要根据具体的机械臂轨迹规划目标来定义。updateleader 函数实现了发现者位置的更新,发现者会根据环境情况(r2 和 ST 的关系)选择不同的更新策略。updatefollower 函数针对追随者,追随者会根据与最优位置的距离来调整自己的位置。updatescout 函数则是警戒者的位置更新逻辑,当整体情况不好时(np.min(fitness) < SD),警戒者会带动种群往更好的方向移动。
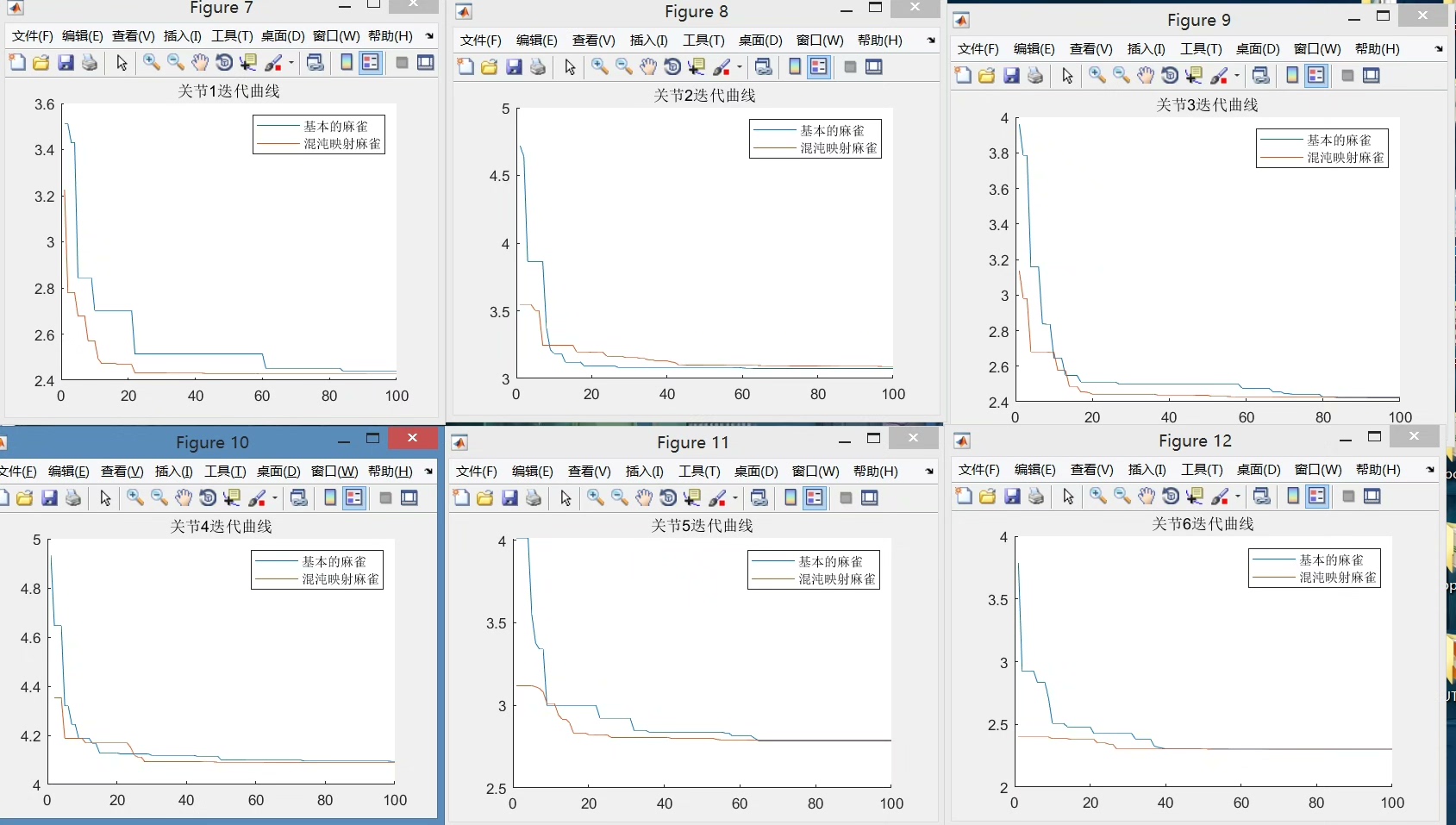
改进麻雀算法与混沌映射
传统麻雀算法可能会陷入局部最优,为了改善这一情况,引入混沌映射。混沌映射具有随机性、遍历性等特点,可以帮助算法跳出局部最优。
麻雀算法加改进麻雀,混沌映射,机械臂轨迹,配合3-5-3多项式规划,关节空间下轨迹规划,可用于六自由度,五自由度等机械臂,替换自己的DH即可
常见的Logistic混沌映射代码如下:
def logistic_map(x0, mu, n):
x = np.zeros(n)
x[0] = x0
for i in range(1, n):
x[i] = mu * x[i - 1] * (1 - x[i - 1])
return x这里 x0 是初始值,mu 是控制参数,n 是迭代次数。通过混沌映射生成的序列可以用于初始化麻雀种群,或者在算法迭代过程中对麻雀位置进行扰动,使算法有更大机会探索到全局最优解。
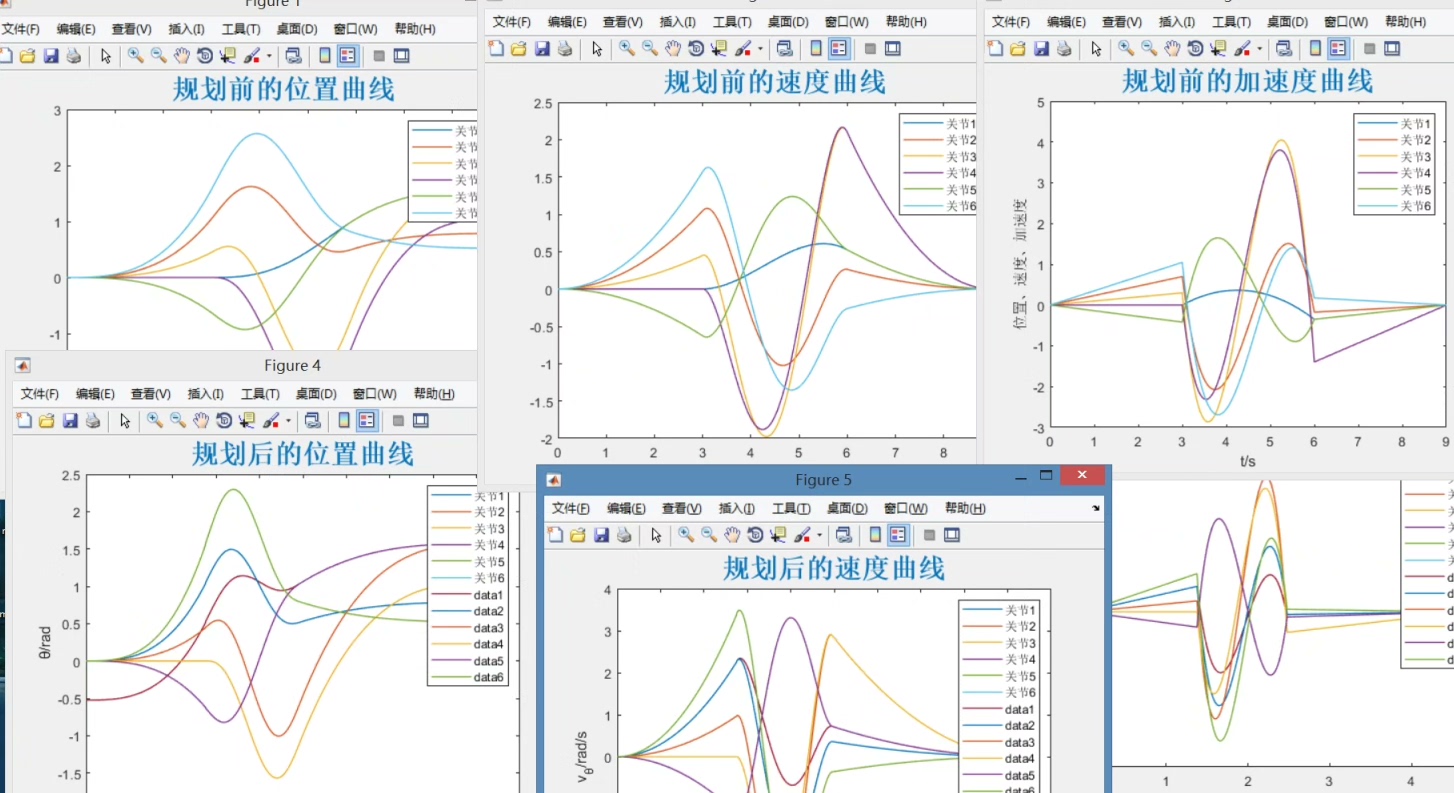
3 - 5 - 3多项式规划在关节空间轨迹规划
在关节空间下,3 - 5 - 3多项式规划可以使机械臂的运动更加平滑。假设我们有起始关节角度 qstart,目标关节角度 qend,运动时间 t_total。
import numpy as np
import matplotlib.pyplot as plt
# 3 - 5 - 3多项式规划
def polynomial_planning(q_start, q_end, t_total, num_points):
t = np.linspace(0, t_total, num_points)
a0 = q_start
a1 = 0
a2 = 0
a3 = 10 * (q_end - q_start) / t_total**3 - 6 * (q_end - q_start) / t_total**2
a4 = -15 * (q_end - q_start) / t_total**4 + 8 * (q_end - q_start) / t_total**3
a5 = 6 * (q_end - q_start) / t_total**5 - 3 * (q_end - q_start) / t_total**4
q = a0 + a1 * t + a2 * t**2 + a3 * t**3 + a4 * t**4 + a5 * t**5
return q
# 示例参数
q_start = 0
q_end = np.pi / 2
t_total = 5
num_points = 100
q = polynomial_planning(q_start, q_end, t_total, num_points)
plt.plot(np.linspace(0, t_total, num_points), q)
plt.xlabel('Time (s)')
plt.ylabel('Joint Angle (rad)')
plt.title('3 - 5 - 3 Polynomial Trajectory')
plt.show()在上述代码中,通过定义3 - 5 - 3多项式的系数 a0 到 a5,根据时间 t 计算出各个时刻的关节角度 q。最后通过 matplotlib 绘制出关节角度随时间的变化曲线,可以直观看到机械臂关节角度的平滑变化。
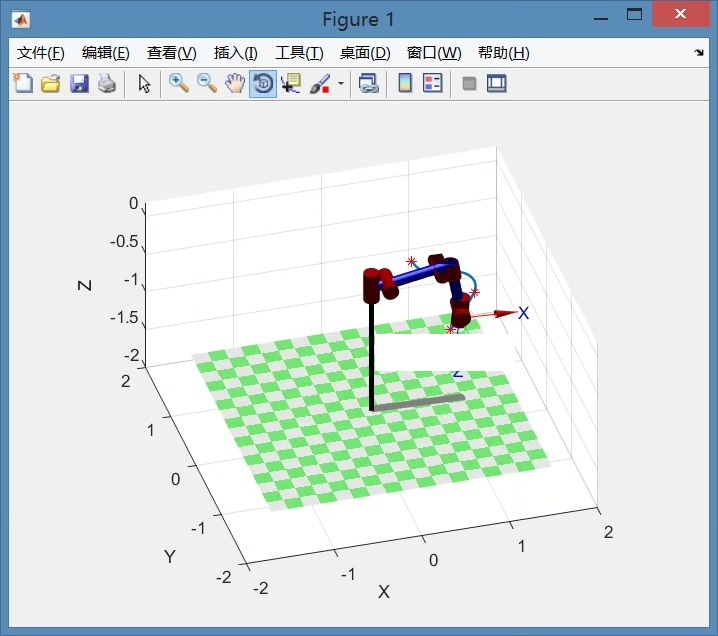
应用于多自由度机械臂
对于六自由度、五自由度等机械臂,只需要根据具体的机械臂结构替换相应的DH参数。DH参数描述了机械臂各个关节之间的关系,通过准确的DH参数,结合上述的麻雀算法及其改进、混沌映射以及3 - 5 - 3多项式规划,就可以实现高效准确的轨迹规划。
在实际应用中,将麻雀算法及其改进应用于优化3 - 5 - 3多项式规划中的参数,比如起始时间、结束时间或者目标位置的权重等,以满足不同任务对机械臂轨迹的要求。同时,混沌映射可以帮助算法在复杂的空间中更好地搜索,找到更优的轨迹规划方案。
总之,这种结合多种方法的机械臂轨迹规划方案,为不同自由度机械臂的高效运动控制提供了一种可行且有效的途径,在工业生产、机器人研发等领域有着广阔的应用前景。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 19
19 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)