基于人工势场法的动态路径规划与曲线平滑处理Matlab实现
基于人工势场法的 动态路径规划+曲线平滑处理路径规划算法 地图好修改自己研究编写的Matlab路径规划可自行设置起始点,目标点,障碍物,自由更换地图。可以和A*和RRT融合 动态障碍物预先声明:该程序为版权所述,仅供学习参考使用。在机器人运动规划领域,路径规划是一个关键问题。今天要分享的是基于人工势场法,并结合曲线平滑处理的路径规划方案,而且这个方案可以自由修改地图,还能和 A*、RRT 等算法融
基于人工势场法的 动态路径规划+曲线平滑处理 路径规划算法 地图好修改 自己研究编写的Matlab路径规划 可自行设置起始点,目标点,障碍物,自由更换地图。 ——————————————————— 可以和A*和RRT融合 动态障碍物 预先声明:该程序为版权所述,仅供学习参考使用。
在机器人运动规划领域,路径规划是一个关键问题。今天要分享的是基于人工势场法,并结合曲线平滑处理的路径规划方案,而且这个方案可以自由修改地图,还能和 A*、RRT 等算法融合应对动态障碍物哦,这一切都是我自己研究编写的 Matlab 路径规划程序~
人工势场法基础
人工势场法的核心思想,就是将机器人在环境中的运动,看作是在一个虚拟的势场中运动。目标点产生引力势场,吸引机器人靠近;障碍物产生斥力势场,排斥机器人远离。
以下是简单的引力势场函数代码示例(Matlab):
function Ug = attractive_potential(robot, goal, eta)
% robot 是机器人当前位置,goal 是目标点位置,eta 是引力系数
dist = norm(robot - goal);
Ug = 0.5 * eta * dist^2;
end这段代码计算了机器人在引力势场中的势能。通过 norm 函数计算机器人到目标点的欧几里得距离 dist,然后根据引力势场公式 $U_g = \frac{1}{2}\eta d^2$(其中 $\eta$ 是引力系数,$d$ 是距离),算出引力势能 Ug。
基于人工势场法的 动态路径规划+曲线平滑处理 路径规划算法 地图好修改 自己研究编写的Matlab路径规划 可自行设置起始点,目标点,障碍物,自由更换地图。 ——————————————————— 可以和A*和RRT融合 动态障碍物 预先声明:该程序为版权所述,仅供学习参考使用。
斥力势场函数代码如下:
function Ur = repulsive_potential(robot, obstacle, rho0, xi)
% robot 是机器人当前位置,obstacle 是障碍物位置,rho0 是影响距离,xi 是斥力系数
dist = norm(robot - obstacle);
if dist <= rho0
Ur = 0.5 * xi * (1/dist - 1/rho0)^2;
else
Ur = 0;
end
end这里,先计算机器人到障碍物的距离 dist。当距离小于等于影响距离 rho0 时,按照斥力势场公式 $Ur = \frac{1}{2}\xi (\frac{1}{d} - \frac{1}{\rho0})^2$ 计算斥力势能 Ur;当距离大于 rho0 时,斥力势能为 0,即障碍物在这个距离外对机器人没有斥力影响。
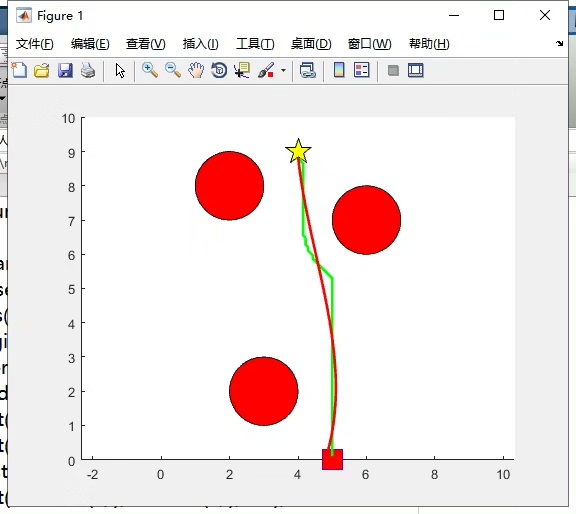
动态路径规划
结合引力和斥力势场,就可以得到总的势场,进而规划出动态路径。
function [path] = dynamic_path_planning(robot_start, goal, obstacles, eta, xi, rho0)
path = [robot_start];
robot = robot_start;
while norm(robot - goal) > 0.1 % 设定一个接近目标的阈值
Ug_grad = eta * (robot - goal);
Ur_grad = zeros(2,1);
for i = 1:size(obstacles, 1)
obstacle = obstacles(i,:);
dist = norm(robot - obstacle);
if dist <= rho0
Ur_grad = Ur_grad + xi * (1/dist - 1/rho0) * (1/dist^3) * (robot - obstacle);
end
end
total_grad = Ug_grad + Ur_grad;
robot = robot - 0.01 * total_grad; % 步长设为 0.01
path = [path; robot];
end
end在这个函数里,从起始点 robotstart 开始,不断计算引力梯度 Uggrad 和斥力梯度 Urgrad,累加得到总的梯度 totalgrad。机器人沿着负梯度方向移动一小步(步长 0.01),并记录路径点,直到机器人接近目标点(距离小于 0.1)。
曲线平滑处理
路径规划出来后,可能比较曲折,需要进行曲线平滑处理。这里简单使用样条插值法。
function smooth_path = smooth_path(path, num_points)
x = path(:,1);
y = path(:,2);
t = 1:size(path, 1);
new_t = linspace(1, size(path, 1), num_points);
new_x = spline(t, x, new_t);
new_y = spline(t, y, new_t);
smooth_path = [new_x, new_y];
end这段代码先提取路径点的 x 和 y 坐标,然后利用 linspace 函数生成新的插值点位置 newt,再通过 spline 函数进行样条插值,得到平滑后的 x 和 y 坐标,组合成平滑路径 smoothpath。
地图修改与参数设置
这个路径规划程序的一大优势就是地图好修改。可以自行设置起始点、目标点、障碍物,自由更换地图。比如设置起始点为 [0, 0],目标点为 [10, 10],障碍物为 [[2, 2]; [5, 5]; [8, 8]]:
robot_start = [0, 0];
goal = [10, 10];
obstacles = [[2, 2]; [5, 5]; [8, 8]];
eta = 1; % 引力系数
xi = 100; % 斥力系数
rho0 = 1; % 障碍物影响距离这样就轻松完成了地图和参数设置。
与 A* 和 RRT 融合
理论上,将人工势场法与 A、RRT 融合可以更好地应对复杂动态环境。比如在 A 算法搜索到大致路径后,利用人工势场法对局部路径进行优化,处理动态障碍物。虽然具体实现代码较复杂,但思路就是结合不同算法的优势。
% 简单示意如何在 A* 基础上调用人工势场法优化
% 假设 A* 算法得到路径 astar_path
astar_path = a_star_planning(robot_start, goal, obstacles);
optimized_path = dynamic_path_planning(astar_path(1,:), goal, obstacles, eta, xi, rho0);这里先调用 A 算法得到 astar_path,然后把 A 路径的起始点作为人工势场法动态路径规划的起始点,进一步优化路径,以应对动态障碍物。
预先声明:该程序为版权所述,仅供学习参考使用。希望这个分享能对大家在路径规划研究上有所帮助,欢迎一起交流探讨呀~

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)