⭐STM32视觉羽毛球收集机器人系统设计
摘要:本项目设计了一款基于STM32和OpenMV机器视觉的智能羽毛球回收机器人系统。系统通过摄像头识别羽毛球位置,控制机器人移动并利用机械臂完成抓取运输任务。具备自动循环工作、蓝牙/语音控制、红外/超声波避障等核心功能,并支持手机图传、循迹运输等扩展功能。提供完整的硬件原理图、软件代码及器件清单,可根据需求进行功能定制,适用于运动场馆等场景的自动化物品回收。系统实现了羽毛球识别、抓取、运输的全流
基于OpenMV的羽毛球收集系统设计
实物视频
【⭐STM32机器视觉羽毛球回收机器人】https://www.bilibili.com/video/BV1tZqPBSEPz?vd_source=9bc1ab89d6e2c73bc7a852726ea46376
基于STM32与机器视觉的多功能物品回收装置
随着智能化技术的快速发展,机器人在运动、娱乐和物品回收领域的应用日益广泛。本项目旨在设计一款基于STM32与OpenMV的视觉羽毛球收集机器人系统,通过机器视觉和智能控制技术,实现羽毛球的自动识别、抓取与运输功能,能够自动完成羽毛球的收集与回收任务。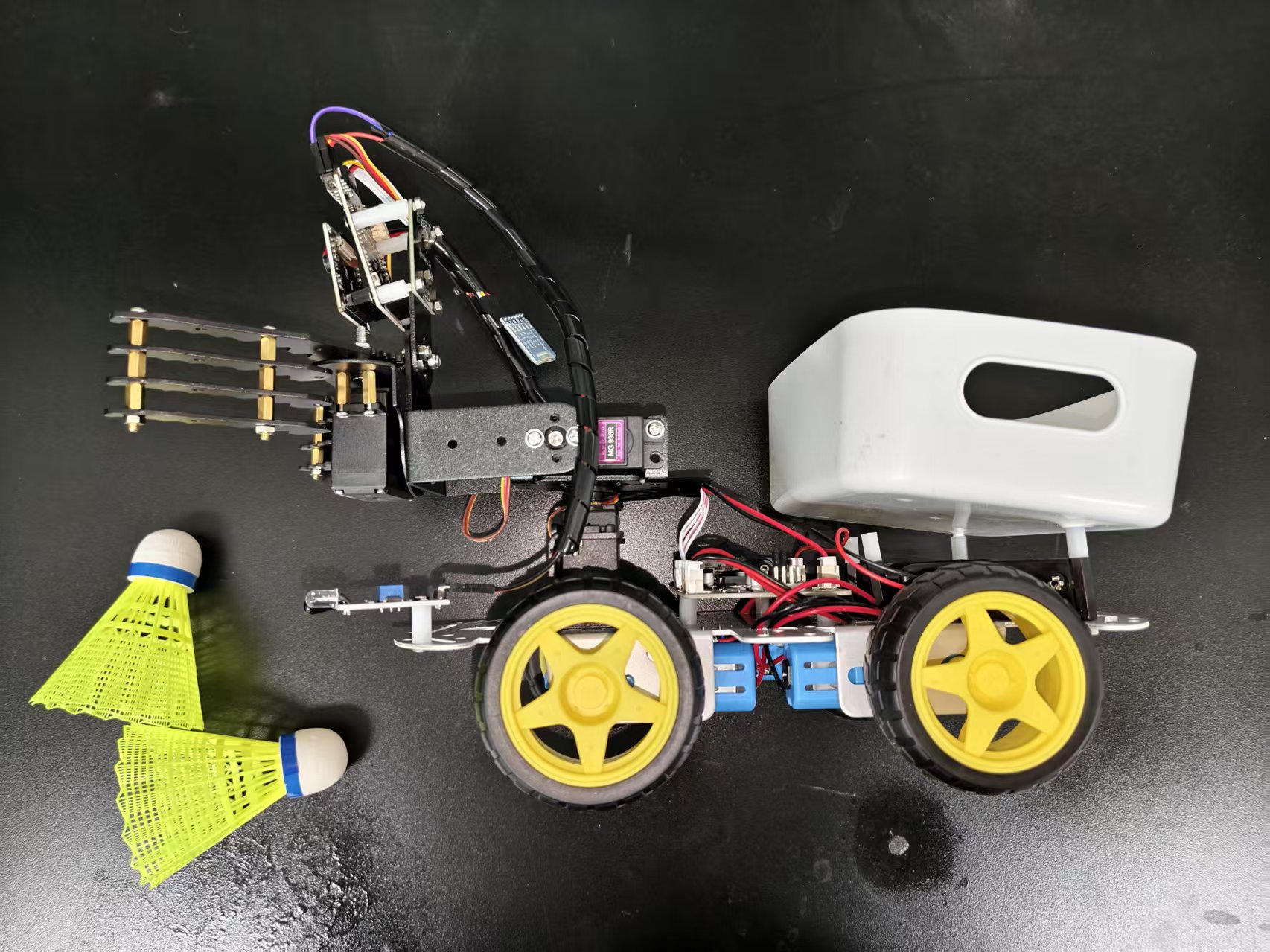
系统概述
本系统采用STM32微控制器与OpenMV摄像头相结合,利用机器视觉技术进行羽毛球识别与定位。机器人能够识别羽毛球并前往指定位置进行抓取,再通过机械臂将羽毛球放置到车后车斗中。系统设计包括基本的羽毛球收集功能及多个扩展功能,提供全自动和智能化的物品回收解决方案。
系统特点
-
支持实物定制: 提供硬件和系统的定制化服务,满足不同应用场景需求。
-
资料齐全: 项目提供完整的原理图、流程图、视频及器件清单,帮助用户深入了解每个细节。
-
完整代码支持: 提供详细的代码和调试软件,支持用户进行二次开发与优化。
-
免费方案咨询: 欢迎前来咨询,我们为您提供免费技术支持与方案建议。
系统功能
✨ 基本功能
-
羽毛球识别:
系统通过OpenMV摄像头识别羽毛球,并判断其位置和距离。羽毛球的识别可以根据需要进行替换,系统会根据视觉识别反馈定位目标物。 -
车辆移动与目标定位:
当羽毛球识别成功后,机器人自动控制车辆前往羽毛球位置。机器人能够自动导航并精确到达指定目标地点。 -
机械臂抓取:
机器人到达指定距离后,机械臂会根据预设动作执行抓取操作,确保羽毛球能够被准确抓取。 -
物品放置:
抓取成功后,机器人将羽毛球放置到车后的车斗中。系统会确认放置成功并准备下一轮任务。 -
自动循环:
完成放置后,机器人会重新启动新一轮的羽毛球识别与抓取操作,确保任务的高效完成。
✨ 扩展功能
-
蓝牙控制:
用户可以通过手机APP进行一键控制,启动机器人执行任务,或根据需要切换不同的操作模式。 -
红外避障:
系统通过红外传感器实时检测前方障碍物,并自动避开障碍,保证机器人在复杂环境下的顺利运行。 -
超声波避障:
除了红外避障外,系统还配备了超声波避障功能,能够精准测量与障碍物的距离,避免碰撞。 -
手机图传:
通过手机APP,用户可以实时查看机器人摄像头的画面,了解当前环境和任务进度,增强操作体验。 -
语音控制:
用户可以通过语音指令控制机器人操作,进行任务启动、停止、模式切换等操作,提升互动性。 -
循迹运输:
在蓝牙控制模式下,机器人能够根据地面标线进行自动寻迹,完成羽毛球的运输任务。 -
定点运输:
用户可以设置指定地点,机器人在拾取一定数量的羽毛球后,自动将物品运输至指定地点。
系统扩展与定制
本系统不仅具有完整的基本功能,还支持多种扩展功能。根据用户的需求,我们提供了硬件和系统的定制服务。无论是对于特定物品的识别、不同环境的避障需求,还是对功能的进一步优化,我们都可以根据实际需求进行修改和定制。
提供的资料
-
原理图与流程图: 完整的电路设计和系统流程,帮助用户理解系统架构。
-
视频演示: 展示机器人执行任务的过程,方便用户了解操作和应用场景。
-
器件清单: 提供所有硬件器件的详细清单,确保用户能够准确获取所需组件。
-
完整代码支持: 提供源代码,支持二次开发和个性化调整。
免费咨询与方案提供
我们提供免费的技术咨询服务,帮助您选择合适的硬件和系统方案。如果您有任何疑问或定制需求,欢迎随时联系。我们将为您提供详细的解决方案和技术支持。
结语
STM32视觉羽毛球收集机器人系统,结合OpenMV与智能控制技术,旨在为用户提供一款高效、智能的羽毛球收集与运输机器人。无论是在娱乐、运动场馆,还是需要自动化物品回收的环境中,系统都能够高效完成任务。通过完整的硬件和软件支持,您可以轻松实现定制化应用,提升生产效率与操作体验。
关注我们,获取更多调试功能软件和实物定制服务!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)