3D 世界中的探索之路:RRT 与 RRT* 3D 路径规划算法之旅
RRT 3D 和 RRT3D 算法为机器人在 3D 空间中的路径规划提供了强大的工具。RRT 算法简单直接,能够快速找到一条可行路径,而 RRT算法则在此基础上进一步优化,努力为我们带来最优路径。通过 MATLAB 代码的实践,相信大家对这两个算法的理解会更加深刻。小伙伴们可以根据实际需求对这些代码进行调整和扩展,比如应用到更复杂的 3D 场景,或者尝试不同的参数设置来观察算法效果。希望大家在机器
RRT 3D, RRT星 3D 路径规划算法,机器人路径规划导航RRTstar,有算法matlab源文件,可直接运行并且有中文注释,适合初学者学习入门。 算法,matlab源代码学习。
在机器人路径规划导航的领域里,RRT(快速探索随机树)及其优化版本 RRT(RRT 星)算法就像是指引机器人在复杂空间中穿梭的智慧灯塔。今天咱们就深入到 3D 空间,一起揭开 RRT 3D 和 RRT 3D 路径规划算法的神秘面纱,并且借助 MATLAB 源代码来更好地理解它们,特别适合刚入门这个领域的小伙伴们哦。
一、RRT 3D 算法初窥
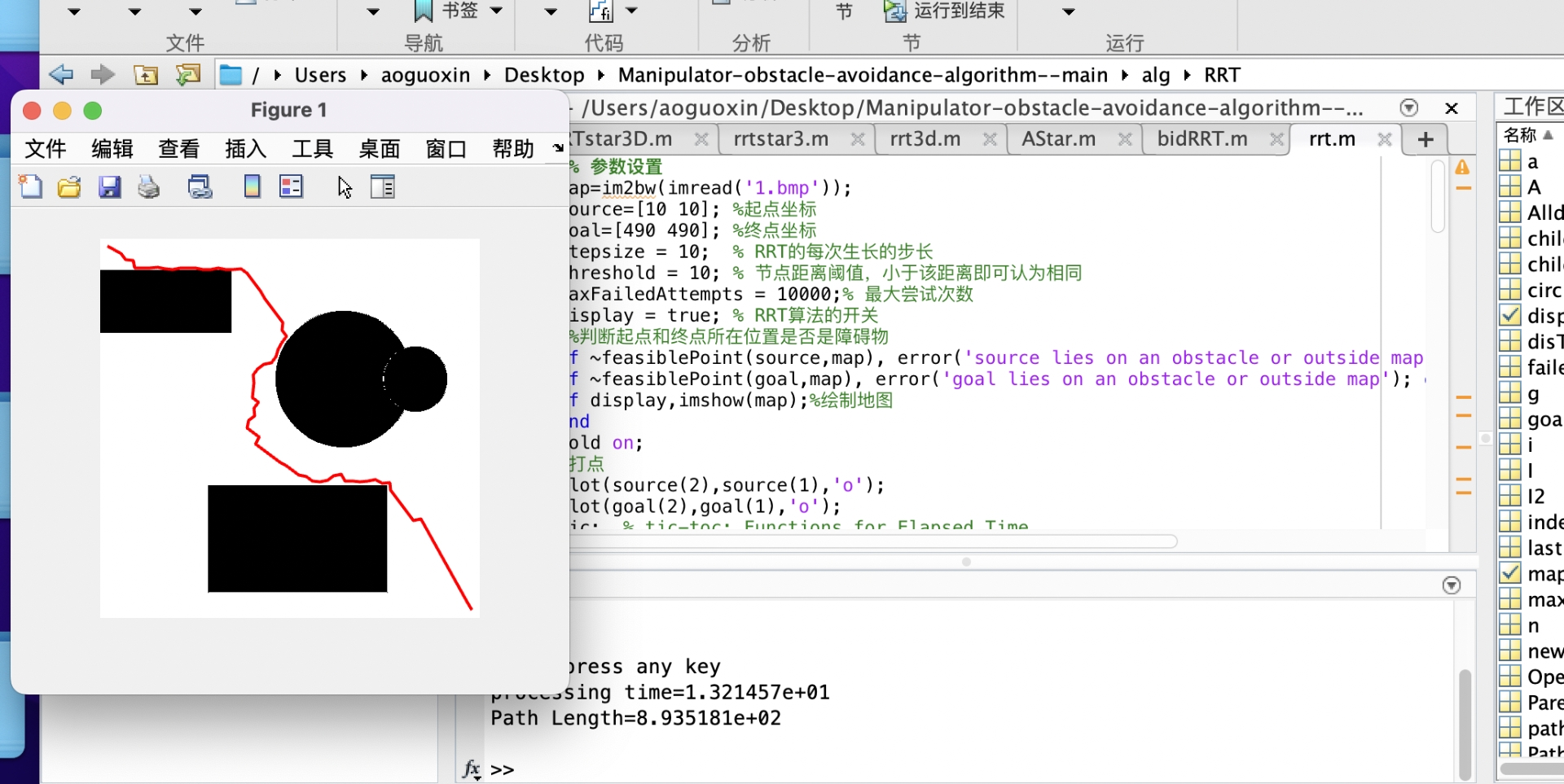
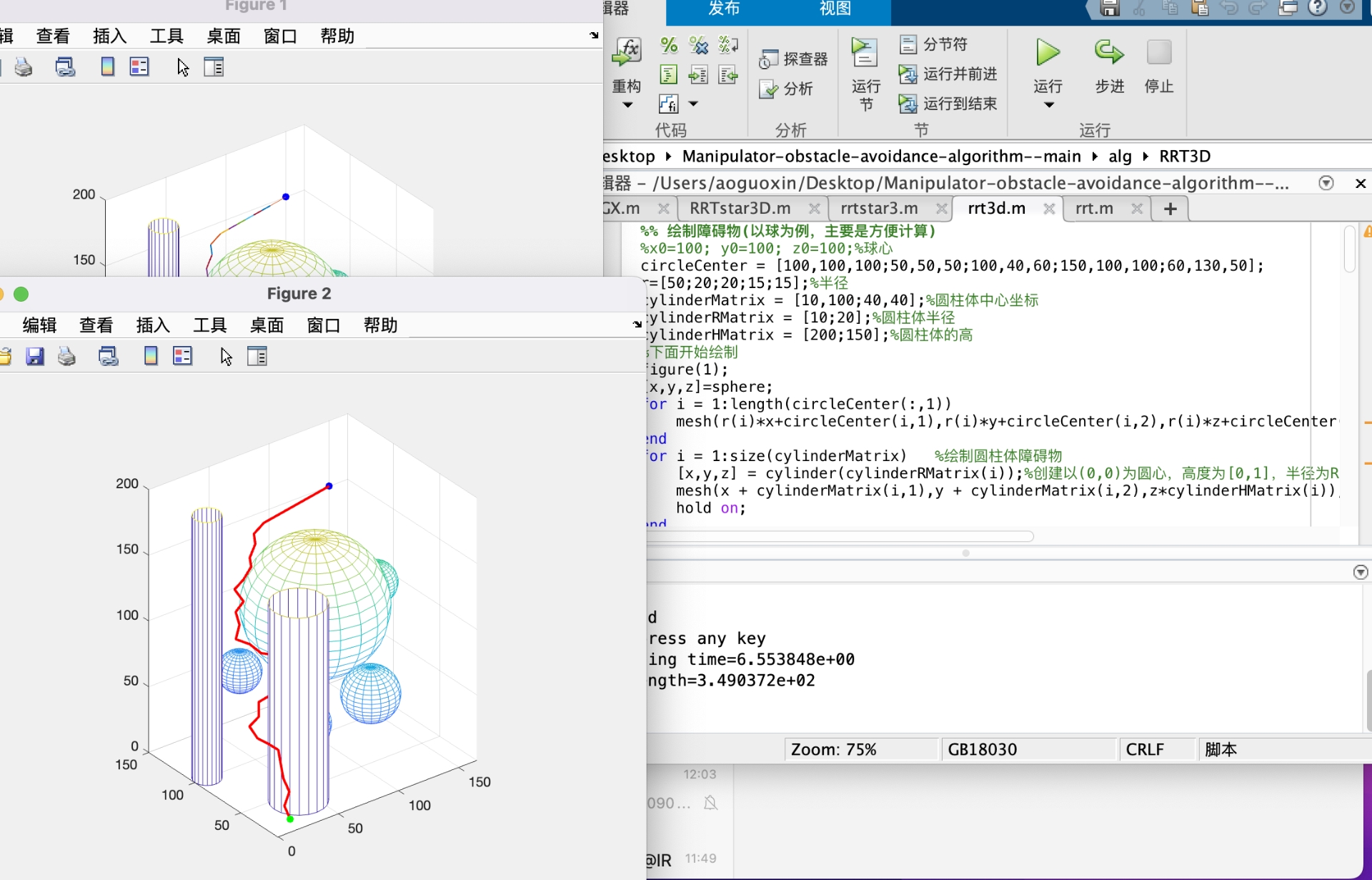
RRT 算法的核心思想是通过在搜索空间中随机采样点,逐步构建一棵搜索树,从起始点不断向目标点生长,直到树的节点能够覆盖目标点,此时就找到了一条路径。在 3D 环境下,它要处理的是三维空间中的位置信息,复杂度自然比二维空间有所提升。
RRT 3D, RRT星 3D 路径规划算法,机器人路径规划导航RRTstar,有算法matlab源文件,可直接运行并且有中文注释,适合初学者学习入门。 算法,matlab源代码学习。
假设我们有一个简单的 3D 环境,包含一些障碍物,咱们来看看 RRT 3D 算法的 MATLAB 代码实现片段:
% 初始化参数
start = [0, 0, 0]; % 起始点坐标
goal = [10, 10, 10]; % 目标点坐标
obstacles = [5, 5, 5, 2]; % 障碍物信息,这里表示中心坐标为(5,5,5),半径为2
step_size = 1; % 每次扩展的步长
max_iter = 1000; % 最大迭代次数
% 初始化树
tree = struct('parent', [], 'node', start);这段代码里,我们首先定义了起始点 start、目标点 goal、障碍物信息 obstacles 以及一些算法参数,像每次扩展的步长 stepsize 和最大迭代次数 maxiter。然后初始化了一个树结构 tree,这个树会在后续不断生长,记录路径搜索的过程。
for iter = 1:max_iter
% 随机采样一个点
rand_point = [rand() * 10, rand() * 10, rand() * 10];
% 找到树中距离随机点最近的节点
[~, nearest_index] = min(sum(([tree.node] - repmat(rand_point, size([tree.node], 2), 1)).^2, 1));
nearest_node = tree.node(:, nearest_index);
% 朝着随机点扩展一步
new_node = nearest_node + step_size * (rand_point - nearest_node) / norm(rand_point - nearest_node);
% 检查新节点是否在障碍物内
if norm(new_node - obstacles(1:3)) > obstacles(4)
% 将新节点添加到树中
new_index = length(tree.node) + 1;
tree.parent(new_index) = nearest_index;
tree.node(:, new_index) = new_node;
% 检查是否到达目标点附近
if norm(new_node - goal) < step_size
break;
end
end
end在这个循环里,每次迭代首先随机采样一个点 randpoint,然后在已有的树 tree 中找到距离这个随机点最近的节点 nearestnode。接着朝着随机点的方向扩展一步得到 newnode,这里通过步长 stepsize 来控制扩展的距离。之后检查新节点是否在障碍物内,如果不在,就把新节点添加到树里。同时,如果新节点已经足够接近目标点(距离小于步长),那就说明找到了路径,可以结束循环啦。
二、RRT* 3D 算法进阶
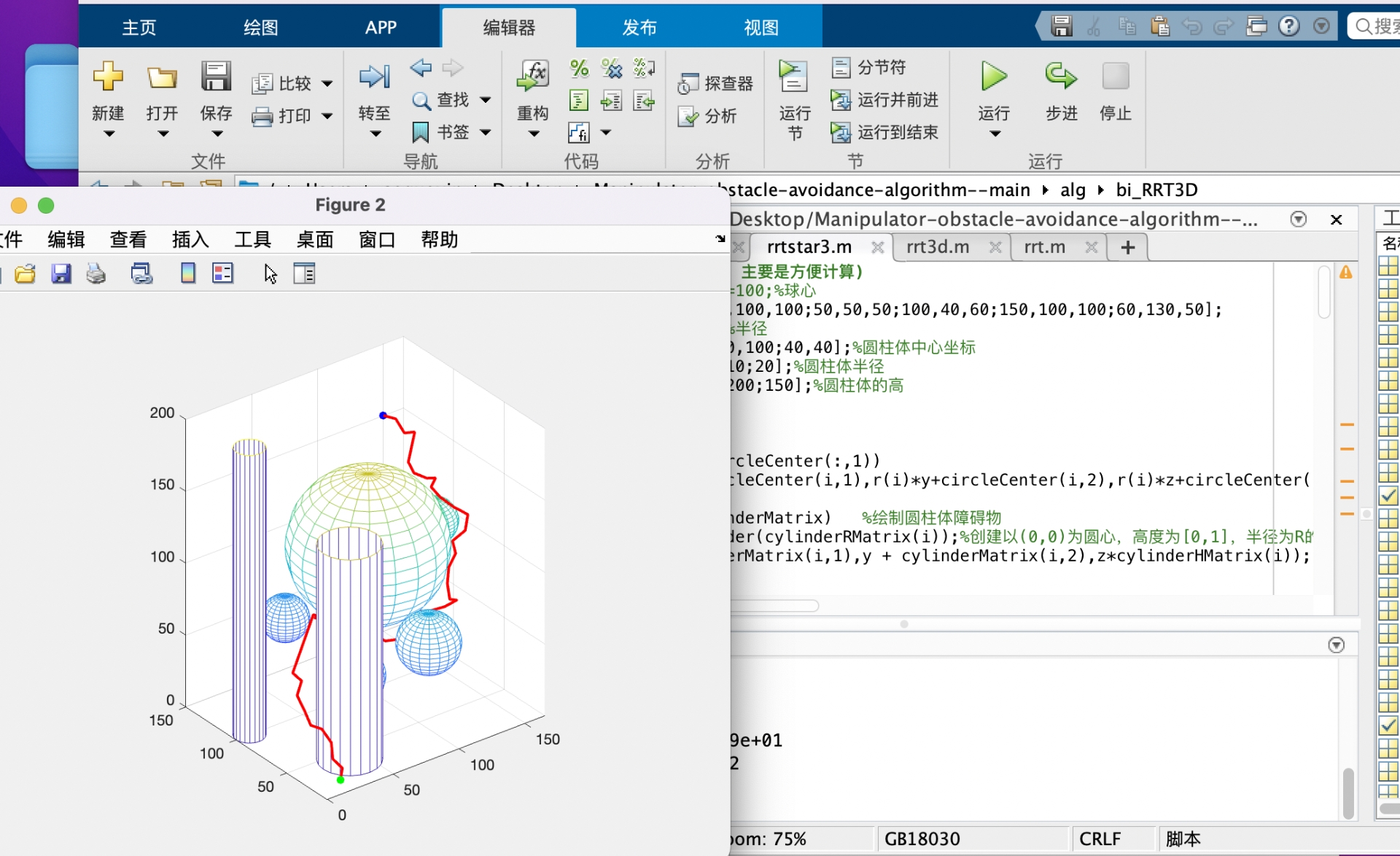
RRT 算法在 RRT 的基础上进行了优化,它不仅考虑找到一条可行路径,还致力于找到最优路径。RRT 在构建树的过程中,会对已有的路径进行重新评估和优化,使得路径的成本不断降低。
同样来看一段 RRT* 3D 的 MATLAB 代码片段:
% 初始化参数(和RRT部分类似,但增加了一些用于优化的参数)
start = [0, 0, 0];
goal = [10, 10, 10];
obstacles = [5, 5, 5, 2];
step_size = 1;
max_iter = 1000;
rewire_radius = 2; % 重连半径
% 初始化树
tree = struct('parent', [], 'node', start, 'cost', 0);这里除了之前 RRT 算法的那些参数,新增了一个 rewire_radius,也就是重连半径,用于控制重连操作的范围。树结构 tree 里也增加了一个记录节点成本的 cost 字段。
for iter = 1:max_iter
% 随机采样一个点
rand_point = [rand() * 10, rand() * 10, rand() * 10];
% 找到树中距离随机点最近的节点
[~, nearest_index] = min(sum(([tree.node] - repmat(rand_point, size([tree.node], 2), 1)).^2, 1));
nearest_node = tree.node(:, nearest_index);
% 朝着随机点扩展一步
new_node = nearest_node + step_size * (rand_point - nearest_node) / norm(rand_point - nearest_node);
% 检查新节点是否在障碍物内
if norm(new_node - obstacles(1:3)) > obstacles(4)
% 找到在重连半径内的所有节点
nearby_indices = find(sum(([tree.node] - repmat(new_node, size([tree.node], 2), 1)).^2, 1) < rewire_radius^2);
new_cost = tree.cost(nearest_index) + norm(new_node - nearest_node);
best_parent_index = nearest_index;
% 寻找使新节点成本最小的父节点
for i = nearby_indices
if tree.cost(i) + norm(new_node - tree.node(:, i)) < new_cost
new_cost = tree.cost(i) + norm(new_node - tree.node(:, i));
best_parent_index = i;
end
end
% 将新节点添加到树中
new_index = length(tree.node) + 1;
tree.parent(new_index) = best_parent_index;
tree.node(:, new_index) = new_node;
tree.cost(new_index) = new_cost;
% 对重连半径内的节点进行重连优化
for i = nearby_indices
if i ~= new_index && tree.cost(new_index) + norm(tree.node(:, i) - new_node) < tree.cost(i)
tree.parent(i) = new_index;
tree.cost(i) = tree.cost(new_index) + norm(tree.node(:, i) - new_node);
end
end
% 检查是否到达目标点附近
if norm(new_node - goal) < step_size
break;
end
end
end这段代码和 RRT 的实现有不少相似之处,但在新节点加入树的过程中多了很多优化操作。首先找到重连半径内的所有节点 nearbyindices,然后寻找使新节点成本最小的父节点 bestparent_index,这一步是为了让新节点以最优的方式加入树,降低整体路径成本。之后不仅添加新节点,还对重连半径内的节点进行重连优化,看看是否可以通过以新节点为父节点来降低这些节点的成本。同样,当新节点接近目标点时结束循环。
三、总结与展望
RRT 3D 和 RRT 3D 算法为机器人在 3D 空间中的路径规划提供了强大的工具。RRT 算法简单直接,能够快速找到一条可行路径,而 RRT 算法则在此基础上进一步优化,努力为我们带来最优路径。通过 MATLAB 代码的实践,相信大家对这两个算法的理解会更加深刻。小伙伴们可以根据实际需求对这些代码进行调整和扩展,比如应用到更复杂的 3D 场景,或者尝试不同的参数设置来观察算法效果。希望大家在机器人路径规划的学习道路上越走越远,创造出更多有趣的应用!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 24
24 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)