计算机毕设答辩|大数据深度学习|计算机毕设项目|pyqt基于深度学习的水下机器人目标识别技术研究(yolo)
YOLOv10是继YOLOv4和YOLOv5之后,进一步优化的目标检测算法,它基于YOLO(You Only Look Once)系列算法的核心理念,致力于在保持高精度的同时,提升检测速度和效率。YOLOv10通过对网络结构、数据预处理、损失函数以及训练策略等方面进行改进,成功提高了在复杂场景下的表现,尤其是在小物体检测、密集目标检测和实时检测方面。

标题:pyqt基于深度学习的水下机器人目标识别技术研究(yolo)
文档介绍:
1 引言
1.1 研究背景和意义
随着海洋资源开发和海洋环境探索需求的日益增长,水下机器人作为重要的工具平台,在海洋观测、资源勘探、水下设施检测与维护等领域发挥着越来越重要的作用。然而,复杂的水下环境,如光线衰减、能见度低、光照变化大以及目标种类繁多等因素,给水下机器人的目标识别带来了极大的挑战。传统的基于手工特征提取的目标识别方法难以适应复杂多变的水下环境,识别精度和鲁棒性往往不能满足实际应用的需求。近年来,深度学习技术凭借其强大的特征学习和表征能力,在计算机视觉领域取得了突破性进展,为水下目标识别提供了新的解决方案。深度学习能够从海量数据中自动学习到具有高度判别性的特征,有效克服水下环境带来的干扰,显著提升目标识别的准确率和鲁棒性。基于深度学习的水下机器人目标识别技术研究,对于提升水下机器人的智能化水平,拓展其应用范围具有重要的意义。一方面,高精度的目标识别技术能够为水下机器人提供可靠的环境感知能力,使其能够更有效地执行各种任务,如自主导航、目标跟踪、水下搜救等,从而提高海洋资源开发和海洋环境监测的效率。另一方面,该技术的研究还可以推动深度学习理论在水下环境中的应用和发展,为其他水下视觉任务,如水下场景理解、水下三维重建等提供技术支撑。此外,该技术的研究成果还可以应用于其他类似的复杂环境下的目标识别任务,如水下考古、水下安防等领域,具有广阔的应用前景和重要的社会经济效益。1.2 国内外研究现状近年来,基于深度学习的水下目标识别技术已成为研究热点,并取得了显著进展。国际上,众多研究机构和高校纷纷开展相关研究,提出了多种基于深度学习的模型和算法。例如,一些研究利用卷积神经网络(CNN)提取水下图像的深度特征,并结合数据增强和迁移学习等技术,有效提升了目标识别的性能。还有一些研究针对水下环境特有的光照变化和模糊问题,设计了特定的网络结构和损失函数,以增强模型的鲁棒性。此外,一些研究开始探索将深度学习与其他技术,如强化学习、三维重建等相结合,以实现更复杂的水下目标识别任务。国内方面,相关研究也日益活跃,一些高校和科研院所开始布局水下机器人视觉技术的研究,并在水下目标检测、分类和识别等方面取得了一定的成果。部分研究团队针对国内特定的水下应用场景,如港口水下设施检测、海洋牧场监测等,开发了相应的深度学习模型和系统,并进行了实际应用验证。总体而言,目前基于深度学习的水下目标识别技术仍处于快速发展阶段。国际上,该领域的研究已经取得了较大的进展,但仍然存在一些挑战,如小样本学习、跨域适应、实时性等问题。国内方面,相关研究起步相对较晚,但发展迅速,并在一些特定应用场景中取得了初步成果。未来,随着深度学习技术的不断发展和水下机器人硬件平台的不断进步,基于深度学习的水下目标识别技术将更加成熟,并在海洋资源开发、海洋环境监测、水下安防等领域发挥更大的作用。1.3 研究内容本研究聚焦于基于深度学习的水下机器人目标识别技术,主要依托PyTorch框架和YOLOv10算法构建识别模型。研究内容包括图像处理模块的开发,用户可上传图片,应用多种增强技术包括伽马校正、白平衡及水下图像去雾等,以提升图像质量。此外,系统支持对上传图片进行预测并保存结果,为用户提供便捷的操作体验。另一核心研究内容为检测设置功能的实现,用户可根据需求设置置信度阈值,以调整目标识别的精度。同时,系统提供模型位置查看功能,增强透明度和可追溯性。通过这些研究内容,旨在提升水下机器人在复杂环境下的目标识别能力,为水下探测、资源开发等领域提供技术支持。
2.1 PyTorch框架
PyTorch是一个广泛使用的深度学习框架,主要由Facebook人工智能研究院(FAIR)开发,具备高效的计算图机制和灵活的动态神经网络结构。它的核心优势之一是其动态计算图(Dynamic Computational Graph)特性,允许在模型的训练过程中实时修改计算图。这种灵活性使得PyTorch在开发时可以更方便地进行调试和原型设计,特别适用于那些需要复杂控制流和动态变化的神经网络。与静态计算图的TensorFlow不同,PyTorch的动态计算图支持即时反馈,使得开发者可以直接通过Python代码与模型进行交互,从而加速了实验和开发的进程。
另外,PyTorch的另一个显著特点是其与Python生态系统的紧密集成,尤其是在Numpy、SciPy等科学计算库的兼容性方面,使得数据处理和模型开发变得更加流畅。PyTorch也拥有强大的GPU加速能力,支持CUDA并行计算,显著提升了大规模数据处理和深度学习训练的效率。此外,PyTorch还拥有丰富的预训练模型和工具库,如TorchVision、TorchText等,为图像处理、自然语言处理等领域的应用提供了很大的便利。这些特性使得PyTorch成为学术研究和工业应用中的热门选择,并且随着社区的发展和支持,越来越多的开发者和研究人员选择它作为主要的深度学习框架。
这个图展示了PyTorch框架的核心组成部分,简洁地涵盖了其主要模块及功能。PyTorch的基础操作依赖于其强大的Tensor(张量)类,类似于NumPy中的ndarray。Tensor操作包括基本的数学运算、矩阵操作、广播机制、多维数组支持等。这些操作是PyTorch进行数据处理和训练的基础。自动微分是PyTorch的一项重要特性,借助`Autograd`模块实现。通过构建计算图并自动追踪张量的操作,PyTorch可以在训练过程中自动计算梯度。这对于神经网络训练中的反向传播至关重要,帮助开发者减少手动求导的繁琐。PyTorch提供了灵活的神经网络构建模块。通过`torch.nn`模块,用户可以轻松创建神经网络层、激活函数等。`nn.Module`是所有模型的基类,用户可以继承该类并自定义模型结构,方便地进行深度学习模型的设计和训练。PyTorch提供了多种优化算法,如随机梯度下降(SGD)、Adam、RMSprop等,帮助优化神经网络的参数。优化器通过调整模型的权重以减少损失函数,从而提高模型的预测性能。 PyTorch提供了`Dataset`和`DataLoader`类,用于高效地加载和处理数据。`Dataset`类可以帮助用户定义如何获取数据,`DataLoader`类则通过批处理和多线程等方式加速数据加载过程,极大提高了训练效率。PyTorch对GPU的支持是其优势之一。通过CUDA接口,PyTorch能够利用NVIDIA的GPU进行高效的并行计算,显著提高模型训练和推理的速度。
2.2 PyQt5简介
PyQt5是Python语言的一个图形用户界面(GUI)库,基于Qt框架开发而成,Qt是一个强大的跨平台应用程序开发框架,广泛应用于桌面软件、嵌入式系统以及移动端开发中。PyQt5通过Python对Qt的封装,使得开发者可以使用Python语言来创建富有交互性和功能强大的应用程序。它支持Qt框架中的各种功能,包括窗口、按钮、标签、文本框、图形视图、表格、树形结构等多种控件,帮助开发者快速搭建图形化界面。此外,PyQt5还提供了事件驱动的编程模型,使得开发者能够轻松管理界面的响应和交互逻辑,极大提高了开发效率。
PyQt5的优点之一是跨平台支持,开发者使用PyQt5创建的应用可以在Windows、Linux、macOS等不同操作系统上运行,而无需做额外的修改。它还提供了对Web、数据库、XML、OpenGL等多个技术的支持,满足多种应用场景的需求。PyQt5具有高度的灵活性和可定制性,能够创建出高度复杂和精美的用户界面。它不仅适合开发桌面应用程序,也能够通过Qt的WebEngine模块支持浏览器嵌入功能,为开发者提供更多的可能性。结合Python语言的简洁与Qt框架的强大,PyQt5成为了开发跨平台GUI应用的重要工具,广泛应用于科学计算、数据分析、图形编辑、自动化工具等各个领域。
2.3YOLOv10简介
YOLOv10是继YOLOv4和YOLOv5之后,进一步优化的目标检测算法,它基于YOLO(You Only Look Once)系列算法的核心理念,致力于在保持高精度的同时,提升检测速度和效率。YOLOv10通过对网络结构、数据预处理、损失函数以及训练策略等方面进行改进,成功提高了在复杂场景下的表现,尤其是在小物体检测、密集目标检测和实时检测方面。YOLOv10采用了一些新颖的技术,如跨层特征融合、多尺度训练以及自适应锚点生成,这些优化使得该模型在准确度和推理速度之间取得了更好的平衡,适合实时性要求较高的应用场景,如自动驾驶、安防监控以及工业检测等领域。
与前代版本相比,YOLOv10更加强调模型的轻量化和高效性,同时也提升了对边缘设备和嵌入式系统的适配能力。通过合理的模型压缩和加速优化,YOLOv10能够在计算资源有限的设备上高效运行。它的优势不仅在于推理速度的提升,还在于对训练数据的适应性更强,能够有效处理多种不同尺寸、不同类别的物体,特别是在复杂背景和低光照环境下,仍能保持较高的准确率。此外,YOLOv10在目标检测精度、召回率和F1-score等指标上也较其前身版本有了显著提升,是一款在精度和速度上都达到较高水平的目标检测算法。
2.4目标检测算法简介
深度学习(Deep Learning)是机器学习的一个子领域,它被设计用来模拟人类学习的层次化过程,通过构建具有多个隐藏层的神经网络模型,从大量数据中自动学习有用的特征表示。这种技术极大地提升了机器学习模型在图像识别、语音识别、自然语言处理等任务上的性能。深度学习的核心是神经网络,特别是深度信念网络、循环神经网络和YOLOv8等。这些网络通过大量的训练数据学习输入到输出的复杂映射,从而能够执行诸图像分类、物体检测、语义分割等任务。
深度学习技术在近年来取得了显著的进展,不仅在学术研究而且在工业应用中展现了巨大的潜力。例,通过深度学习,计算机视觉系统能够更准确地识别图像中的对象和场景;自然语言处理系统能够更好地理解文本的语义和上下文信息。此外,深度学习还在医疗诊断、金融预测等领域表现出色。随着计算能力的提升和大数据的普及,深度学习技术的应用范围不断扩大,成为人工智能领域的重要支柱。未来,随着研究的深入和技术的创新,深度学习有望在更多领域发挥更大的作用。
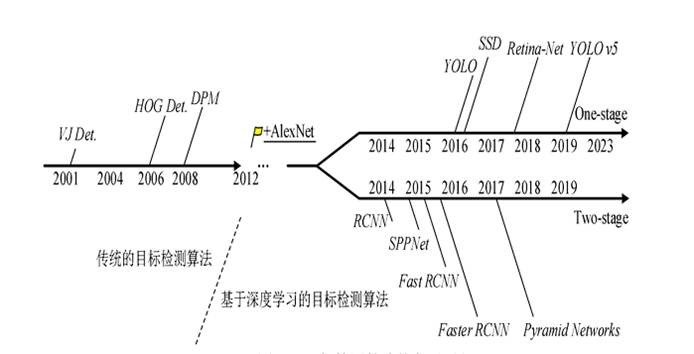
图2-4 目标检测算法的发展历程
2.5 深度学习
深度学习技术是一种模拟人脑神经网络结构的机器学习方法,通过大量数据训练神经网络模型,使其能够自动提取特征并进行复杂任务的预测和分类。这种技术利用多层神经网络的深层结构,通过逐层特征抽象和转换,实现对输入数据的深层次理解和表征。深度学习技术在图像识别、语音识别、自然语言处理等领域取得了显著的成果,并不断拓展到更多应用场景,为人工智能发展提供了强大的动力。
深度学习技术的核心是神经网络模型,它由大量的节点(或称为神经元)组成,这些节点相互连接形成层次结构。每个节点接收来自其他节点的输入,对输入进行加工处理,并生成输出。在训练过程中,神经网络通过调整节点之间的连接强度(权重)和节点自身的激活阈值,从而学习到从输入数据到输出结果的最佳映射关系。
此外,深度学习技术还在不断拓展到更多应用场景。例如,在医疗领域,深度学习技术可以帮助医生进行疾病诊断和治疗规划;在金融领域,深度学习技术可以用于风险评估和欺诈检测;在交通领域,深度学习技术可以支持自动驾驶和交通流量预测。随着计算能力的提升和数据量的增加,深度学习技术有望在未来发挥更大的作用,为人类社会带来更多的便利和进步。
2.6 OpenCV
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉和机器学习库,旨在为实时图像处理和计算机视觉任务提供强大的功能。自1999年由英特尔推出以来,OpenCV已成为全球广泛使用的计算机视觉工具之一,支持Windows、Linux、macOS以及Android和iOS等多个平台。它提供了丰富的图像处理函数,包括图像读取、显示、变换、特征提取、对象跟踪、边缘检测、图像分割等多种功能,支持多种常见的图像文件格式。OpenCV还集成了强大的机器学习模块,能够进行分类、回归、聚类等任务,使得开发者能够在计算机视觉任务中实现复杂的算法和数据分析。
OpenCV的优势在于其跨平台性、开源性和广泛的应用范围。作为一个高效的图像处理库,OpenCV广泛应用于工业检测、安防监控、医学影像分析、自动驾驶、机器人视觉等领域。它还支持GPU加速,能够大幅提升图像处理速度,尤其在处理大规模图像数据时表现尤为突出。与其他计算机视觉库相比,OpenCV具有丰富的文档和教程,社区活跃,更新频繁,方便开发者快速入门并实现高效的图像处理任务。除此之外,OpenCV的与深度学习框架的集成(如TensorFlow和PyTorch)进一步增强了它在人工智能和机器学习领域的应用能力,使得开发者可以更加灵活地构建复杂的视觉识别和智能化应用。
3 系统需求分析
3.1 系统概述本系统是一套基于深度学习的水下机器人目标识别技术解决方案,利用PyTorch框架和YOLOv10算法构建高效的目标检测模型。系统支持用户上传图片,并提供了多种图像增强技术,包括伽马校正、白平衡和水下图像去雾等,以改善水下环境的图像质量。用户可以对上传的图片应用增强技术,进行预测,并保存结果,从而实现水下目标的精准识别。系统还具备灵活的检测设置功能,用户可以根据具体需求设置置信度阈值,以调整目标识别的精度。此外,系统提供模型位置查看功能,确保用户对模型使用的透明度和可追溯性。通过这些功能,系统旨在为水下机器人提供强大的视觉感知能力,支持其在复杂水下环境中的高效作业,广泛应用于水下探测、资源开发等领域。
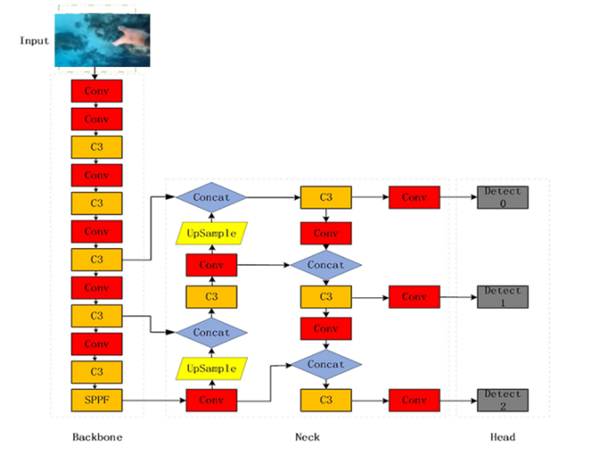
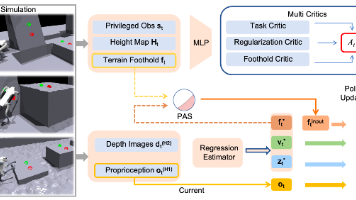
图3-1 模型流程结构
5 系统实现
在图片处理界面,用户可以通过上传图片按钮加载待处理的图像,然后应用增强按钮来应用图像增强技术,包括伽马校正、白平衡调整和水下图像去雾等,以提高图像质量和目标特征的可见性。接下来,用户可以使用预测按钮启动目标识别过程,最后通过保存结果按钮保存处理后的图像或识别结果。这些功能的实现依赖于后端服务器上的深度学习模型和图像处理算法,以及前端界面的交互设计,从而提供了一个直观且高效的图像处理体验。图片处理界面具体如图所示:

图5-1 图像处理
系统使用多线程处理视频流,确保界面响应性,核心代码展示如下:
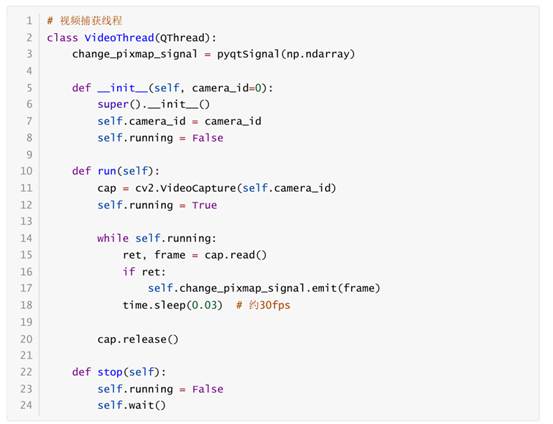
在摄像头控制界面,用户可以选择不同的摄像头设备,并通过启动摄像头按钮激活所选摄像头的视频流。一旦摄像头启动,用户可以启用实时检测功能,该功能会调用后端服务器的深度学习模型对摄像头捕捉到的视频帧进行实时的目标识别和分析。这些功能的实现依赖于前端界面的控件设计和后端的服务器逻辑,包括摄像头API的调用、视频流的处理以及与深度学习模型的集成,从而使用户能够实时监控和识别水下环境中的目标物体。摄像头控制界面具体如图所示:

图5-2 摄像头控制
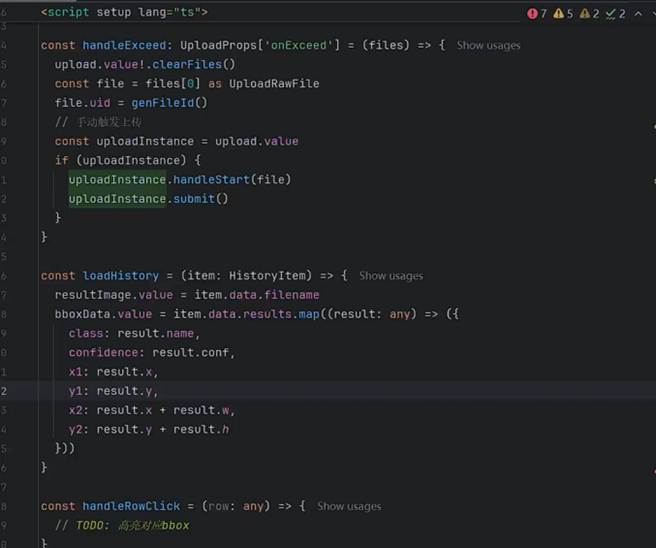
在图像增强界面,用户可以选择多种图像增强技术来提升水下图像的质量和目标特征的可见性。这些技术包括CLAHE增强、伽马矫正、白平衡调整、水下图像去雾和无增强选项。用户还可以根据需要调整伽马值和CLAHE强度,以获得最佳的图像效果。这些功能的实现依赖于后端服务器上预定义的图像处理算法和参数设置,以及前端界面的滑块和下拉菜单等交互元素,使用户能够灵活地定制图像增强策略,从而提高后续目标识别任务的准确性和可靠性。图像增强界面具体如图所示:
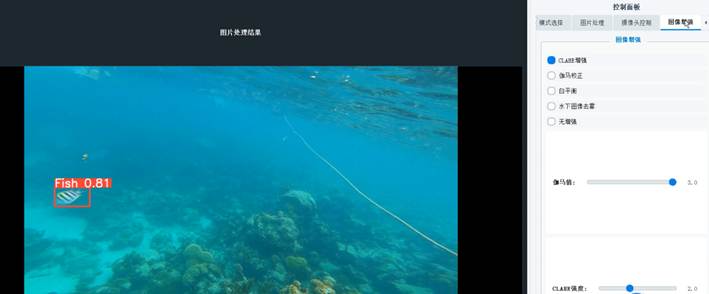
图5-3 图像增强

图5-4 CLAHE增强关键代码

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 28
28 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)