机器人研究数模实验之PID控制:从理论到Simulink实践
我们的目标是通过PID控制实现机器人的各种任务,如机械臂的精准定位、无人机的稳定飞行、无人车的轨迹追踪等。而实现这一目标的途径,是借助m函数调用Simulink中的控制算法,然后在simscape Multibody提供的物理模型里进行测试。
机器人研究数模实验方案PID控制,m函数调用simulink中的控制算法,在simscape Multibody中的物理模型中测试。 跑通模型花了很多时间,这个能帮你节省下时间。 方法适合所有机器人研究,机械臂、无人机,无人车的镇定、轨迹追踪控制算法,有sw模型就可以搭建仿真平台。
在机器人研究领域,数模实验是探索和优化控制算法的重要手段,其中PID控制因其简单高效,应用广泛。今天就跟大家分享下我在机器人研究数模实验方案中,使用PID控制,通过m函数调用Simulink控制算法,并在simscape Multibody物理模型中测试的一些经验,希望能帮大家少走弯路。
一、方案概述
我们的目标是通过PID控制实现机器人的各种任务,如机械臂的精准定位、无人机的稳定飞行、无人车的轨迹追踪等。而实现这一目标的途径,是借助m函数调用Simulink中的控制算法,然后在simscape Multibody提供的物理模型里进行测试。
二、实现过程
1. Simulink中的PID控制算法搭建
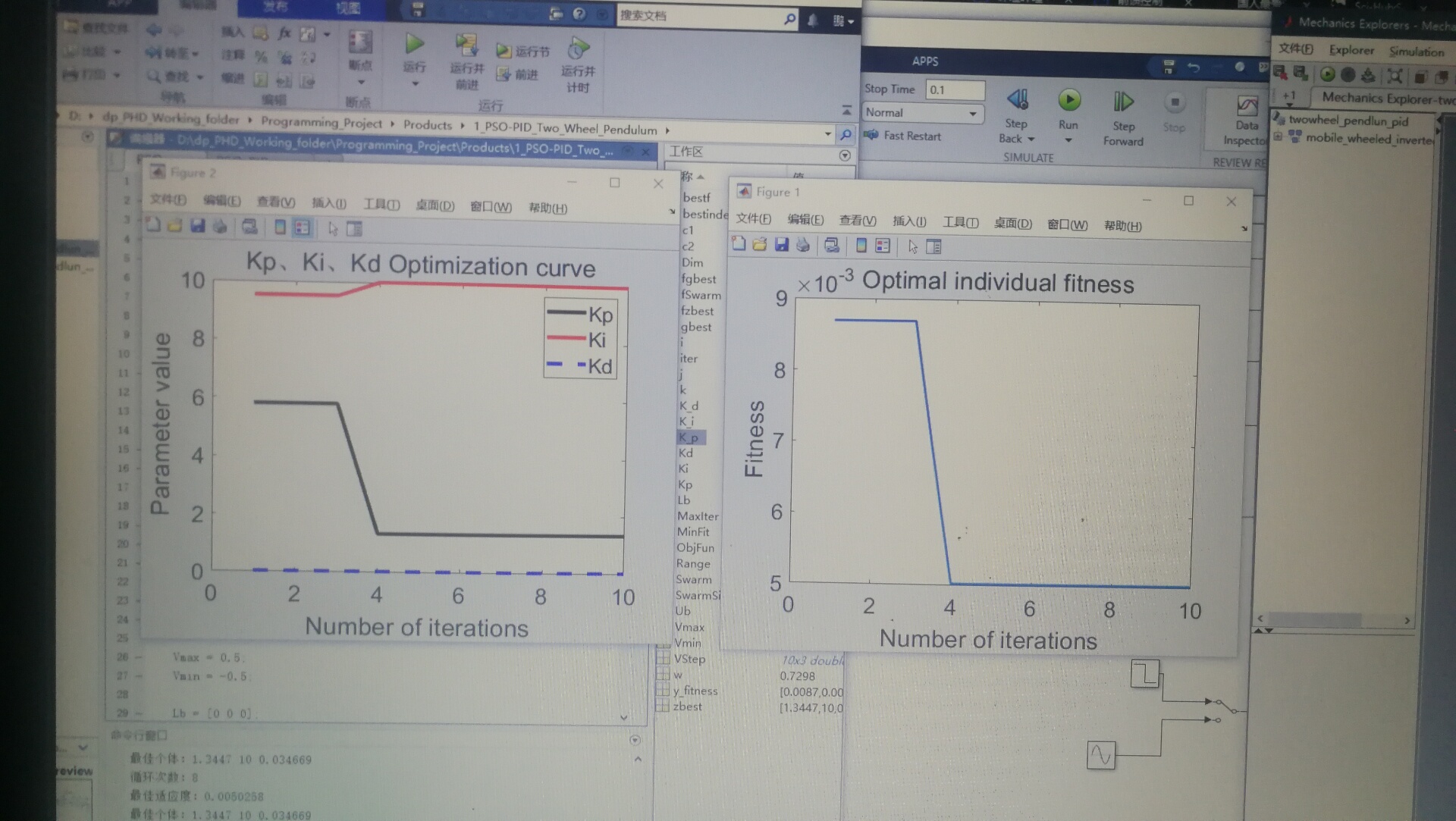
在Simulink中搭建PID控制算法模块其实并不复杂。以一个简单的位置控制为例,首先从Simulink库中拖入PID Controller模块。这个模块有三个关键参数:比例系数(P)、积分系数(I)、微分系数(D)。
% 假设我们手动设置PID参数
Kp = 10;
Ki = 0.1;
Kd = 0.5;Kp决定了系统对误差的即时响应,Ki用于消除稳态误差,Kd则对误差的变化率做出反应,提前调整控制量,让系统更加稳定。在Simulink中,将这些参数填入PID Controller模块对应的参数框即可。
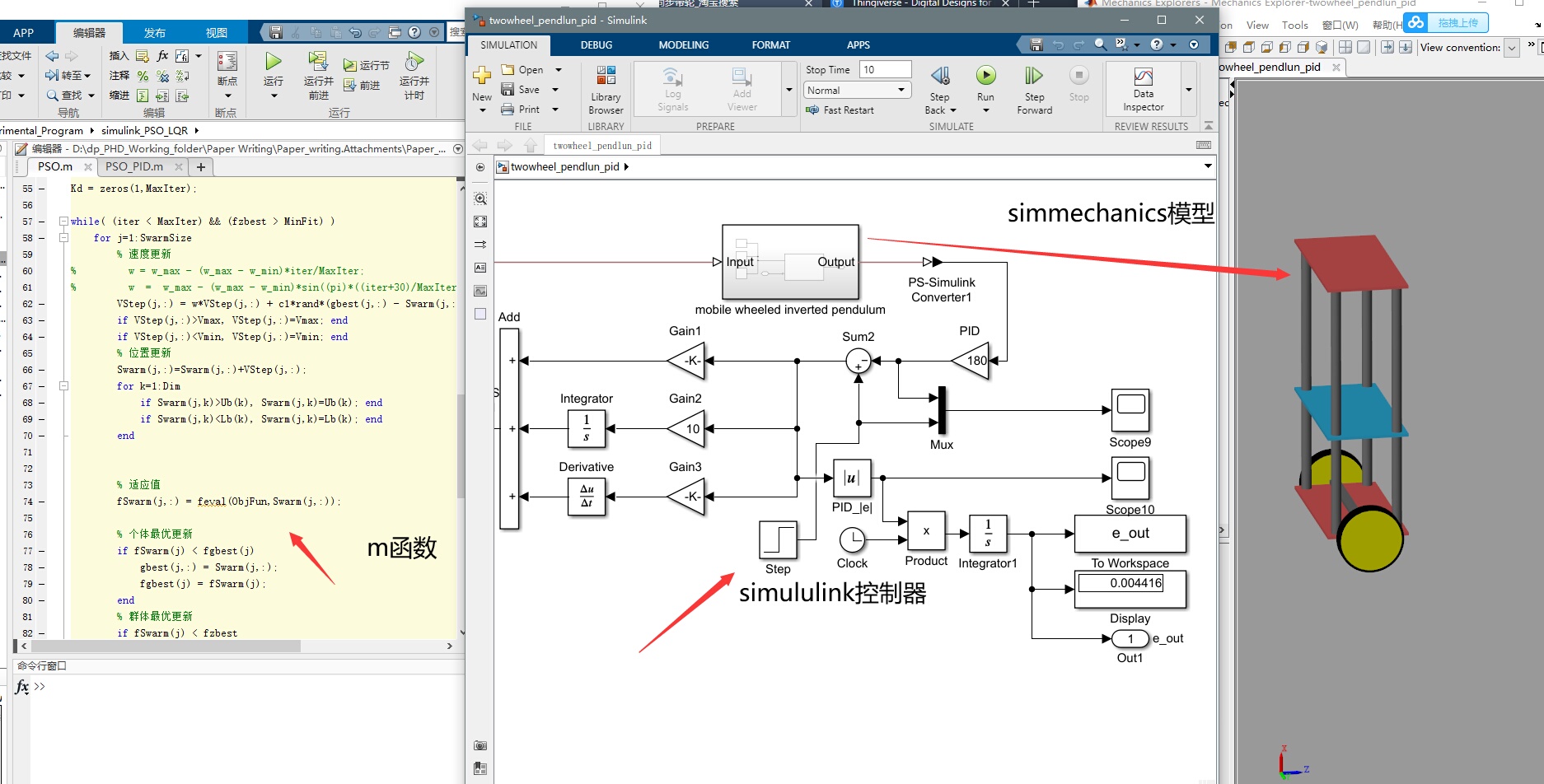
2. m函数调用Simulink控制算法
这里就要用到Matlab强大的脚本功能了。我们可以编写一个m函数来调用Simulink模型。假设已经搭建好了名为“robotpidsim”的Simulink模型,下面是简单的m函数示例:
function run_robot_pid_sim()
% 定义输入信号,这里假设是一个期望位置信号
t = 0:0.01:10; % 时间向量
desired_position = sin(t); % 期望位置随时间正弦变化
% 设置工作区变量
assignin('base', 'desired_position', desired_position);
% 运行Simulink模型
sim('robot_pid_sim');
% 从工作区获取结果
actual_position = evalin('base', 'actual_position');
% 绘图查看结果
figure;
plot(t, desired_position, 'r', 'LineWidth', 1.5);
hold on;
plot(t, actual_position, 'b--', 'LineWidth', 1.5);
legend('期望位置', '实际位置');
xlabel('时间 (s)');
ylabel('位置');
title('PID控制下实际位置与期望位置对比');
end在这个m函数里,我们先定义了期望位置信号,然后通过assignin函数将其传入Simulink模型所在的工作区。接着使用sim函数运行Simulink模型,再用evalin函数从工作区获取实际位置数据,最后绘图展示控制效果。
3. 在simscape Multibody物理模型中测试
simscape Multibody提供了一个非常逼真的物理建模环境。我们需要将搭建好的PID控制算法与创建好的机器人物理模型进行连接。比如对于一个简单的机械臂模型,我们要确保PID输出的控制量(如关节扭矩)能够正确作用到机械臂的关节上。这涉及到模型参数的准确设置,包括质量、惯性矩等,这些参数会直接影响控制效果。
三、经验分享
跑通这个模型真的花了我不少时间。在这个过程中,我发现参数调试是关键。PID三个参数的取值需要反复调整和试验,没有一个通用的最优值,要根据具体的机器人模型和任务需求来定。另外,在连接Simulink控制算法与simscape Multibody物理模型时,一定要仔细检查信号连接是否正确,否则很容易出现控制异常的情况。
机器人研究数模实验方案PID控制,m函数调用simulink中的控制算法,在simscape Multibody中的物理模型中测试。 跑通模型花了很多时间,这个能帮你节省下时间。 方法适合所有机器人研究,机械臂、无人机,无人车的镇定、轨迹追踪控制算法,有sw模型就可以搭建仿真平台。

这个方法通用性很强,只要你有机器人的sw模型(SolidWorks模型等),就可以基于此搭建仿真平台,用于各种机器人的镇定、轨迹追踪等控制算法研究。希望大家在机器人研究的道路上,利用这个方法能更高效地开展工作,少踩些坑。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)