探索三菱FX3U与威纶通触摸屏的项目编程之旅
三菱FX3U三轴伺服电机程序,威纶通触摸屏程序,包含轴点动,回零,相对与绝对定位,整个项目的模块都有:主控程序,复位程序,报警及报警解除,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;程序还包含与机器人I/O通讯模块程序,子程序调用。显示器是威纶的程序。
三菱FX3U三轴伺服电机程序,威纶通触摸屏程序,包含轴点动,回零,相对与绝对定 位,整个项目的模块都有:主控程序,复位程序,报警及报警解除,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;程序还包含与机器人I/O通讯模块程序,子程序调用。 显示器是威纶的程序
最近研究了一个超有意思的项目——三菱FX3U三轴伺服电机程序搭配威纶通触摸屏程序,这里面涵盖了超多关键功能,像轴点动、回零、相对与绝对定位等等,整个项目模块丰富得很,主控程序、复位程序、报警及报警解除、手动操作、生产计数一个不少,弄明白这个程序,就像拿到了项目编程的通关秘籍。今天就来和大家唠唠。
项目功能剖析
轴点动功能
轴点动功能允许操作人员通过威纶通触摸屏轻松控制伺服电机轴的短距离移动,在调整设备位置或进行精细操作时超实用。在三菱FX3U编程中,我们可以通过编写特定逻辑来实现。
// 假设X0为点动按钮输入
LD X0
SET M0 // M0作为点动标志位
// 在主循环中,当M0为ON时控制电机移动
LD M0
OUT Y0 // Y0连接到电机控制输出这里代码逻辑很直白,当点动按钮X0按下,就置位点动标志位M0,主循环里检测到M0为ON就驱动电机输出Y0,让电机动起来。
回零功能
回零是确保设备每次运行都有准确起始位置的关键。程序会驱动电机向零点方向运动,直到检测到零点信号。
// 假设X1为回零按钮输入,X2为零点信号输入
LD X1
SET M1 // M1作为回零标志位
// 回零运动逻辑
LD M1
OUT Y1 // Y1驱动电机向零点方向运动
LD X2
RST M1 // 当检测到零点信号X2,清除回零标志位按下回零按钮X1,置回零标志位M1,电机就朝着零点跑,一旦检测到零点信号X2,就清除标志位,电机停止,回零完成。
相对与绝对定位
相对定位是基于当前位置移动指定距离,绝对定位则是直接移动到设定的绝对坐标位置。
// 相对定位示例,假设D0存放相对位移量
LD M2 // M2为相对定位标志位
MOV D0 D10 // 将相对位移量存入D10
DRVI D10 K1000 Y2 Y3 // 相对定位指令,以1000Hz速度相对当前位置移动D10的距离,Y2为脉冲输出,Y3为方向输出
// 绝对定位示例,假设D2存放绝对坐标值
LD M3 // M3为绝对定位标志位
MOV D2 D12
DRVA D12 K1000 Y2 Y3 // 绝对定位指令,以1000Hz速度移动到D12的绝对坐标位置,Y2为脉冲输出,Y3为方向输出相对定位时,先把相对位移量送到D10,再用DRVI指令驱动电机;绝对定位类似,把绝对坐标值送到D12,用DRVA指令控制电机到达指定位置。
项目模块解读
主控程序
主控程序就像项目的大脑,协调各个功能模块工作。它不断扫描输入信号,根据设定逻辑决定各个模块是否执行。
// 主控程序框架示例
MAIN_LOOP:
LD X0 // 检测各种输入信号
CALL FUNCTION_1 // 调用点动功能子程序
LD X1
CALL FUNCTION_2 // 调用回零功能子程序
LD X2
CALL FUNCTION_3 // 调用相对定位功能子程序
LD X3
CALL FUNCTION_4 // 调用绝对定位功能子程序
LD X4
CALL FUNCTION_5 // 调用其他功能子程序
JMP MAIN_LOOP // 循环扫描通过不断扫描输入信号,调用相应功能子程序,让整个项目有条不紊运行。
复位程序
复位程序用于在设备出现异常或需要重新初始化时,将设备状态恢复到初始设定。
// 假设X5为复位按钮输入
LD X5
RST M0 // 复位点动标志位
RST M1 // 复位回零标志位
RST M2 // 复位相对定位标志位
RST M3 // 复位绝对定位标志位
// 还有可能复位一些计数器、寄存器等按下复位按钮X5,就把各个功能标志位清零,设备回到初始状态。
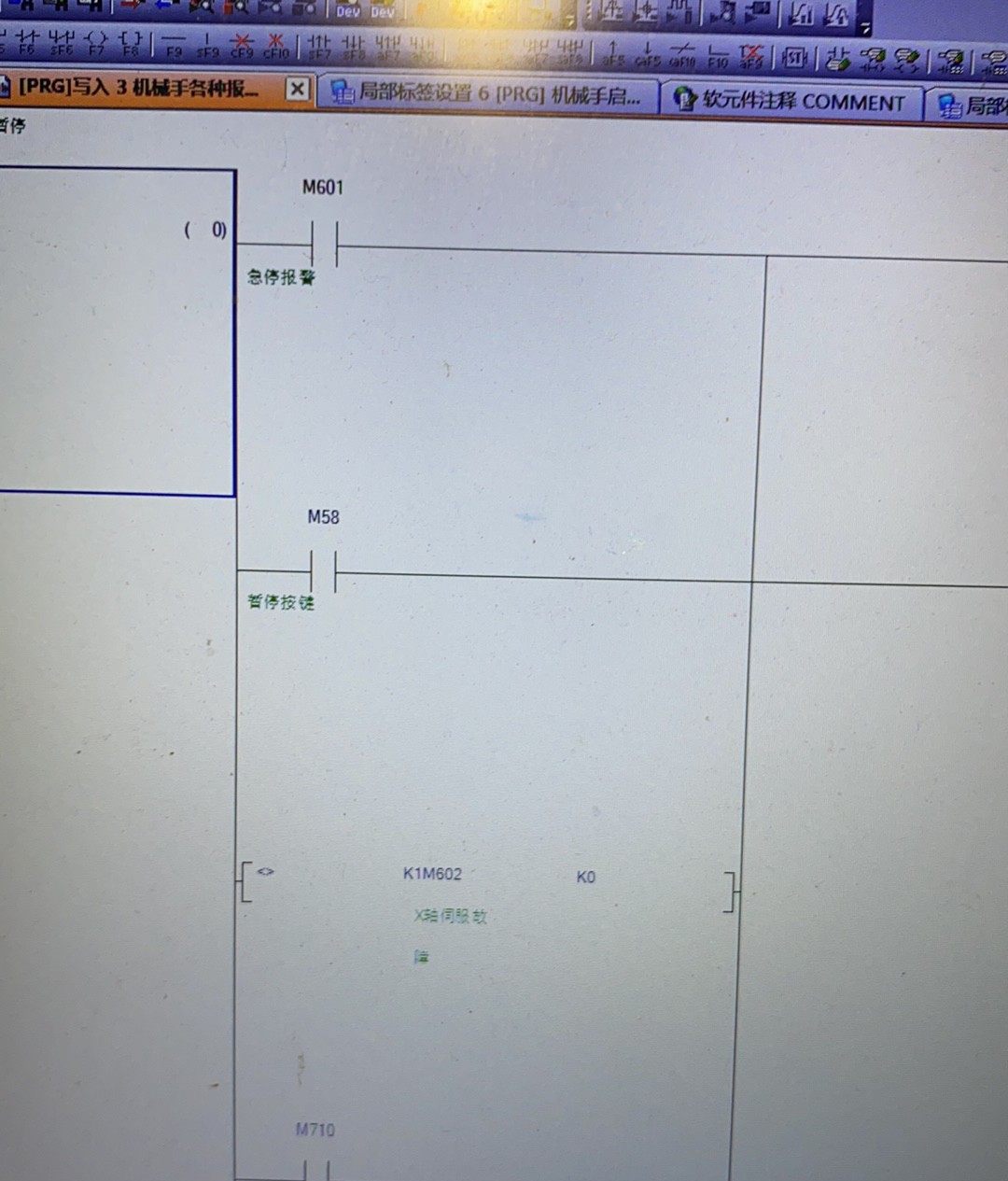
报警及报警解除
当设备出现故障,报警程序启动,通过指示灯、蜂鸣器等方式提醒操作人员。报警解除程序则用于在故障排除后,关闭报警信号。
// 假设M10为故障标志位,Y4为报警输出(如指示灯)
LD M10
OUT Y4 // 故障时点亮报警指示灯
// 假设X6为报警解除按钮输入
LD X6
RST M10 // 按下解除按钮清除故障标志位故障标志位M10为ON时,报警指示灯Y4亮,按下解除按钮X6,清除故障标志位,关闭报警。
手动操作
手动操作模块让操作人员可以在特殊情况下,通过威纶通触摸屏直接控制设备各个动作,方便调试和应急处理。和前面轴点动类似,只是可能控制更全面。
生产计数
生产计数模块记录设备生产产品数量。可以通过检测产品通过信号,每检测到一次就对计数器加1。
// 假设X7为产品通过检测信号,C0为计数器
LD X7
OUT C0 K100 // 每检测到一次X7上升沿,计数器C0加1,累计到100每次产品通过检测信号X7出现上升沿,计数器C0就加1,可用来统计产量。
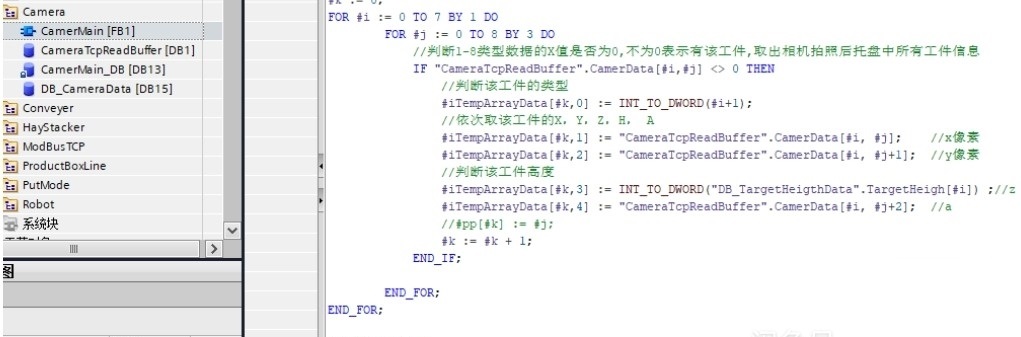
与机器人I/O通讯模块程序
这个项目还包含与机器人I/O通讯模块程序,实现设备和机器人之间数据交互和协同工作。这部分通常涉及特定通讯协议,比如三菱的CC - Link等。
// 简单示例,假设通过特定寄存器传递数据
MOV D20 D30 // 将本地数据寄存器D20的值传递给与机器人通讯相关的寄存器D30
MOV D40 D20 // 接收机器人传递过来的数据寄存器D40的值存到本地D20通过在本地寄存器和通讯相关寄存器间传递数据,实现设备与机器人数据交互。
子程序调用
子程序调用让程序结构更清晰,方便维护和扩展。前面主控程序里就多次调用子程序。
// 定义一个点动功能子程序
FUNCTION_1:
LD X0
SET M0
LD M0
OUT Y0
RET // 返回主程序在主控程序里通过CALL指令调用这个子程序,就可以实现点动功能,不同功能模块化,程序结构一目了然。
三菱FX3U三轴伺服电机程序,威纶通触摸屏程序,包含轴点动,回零,相对与绝对定 位,整个项目的模块都有:主控程序,复位程序,报警及报警解除,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;程序还包含与机器人I/O通讯模块程序,子程序调用。 显示器是威纶的程序
总之,这个三菱FX3U三轴伺服电机搭配威纶通触摸屏的项目程序,功能丰富、模块多样,只要深入理解,对项目编程会有质的提升。要是大家在程序上有啥问题,尽管问,一起探讨!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 14
14 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)