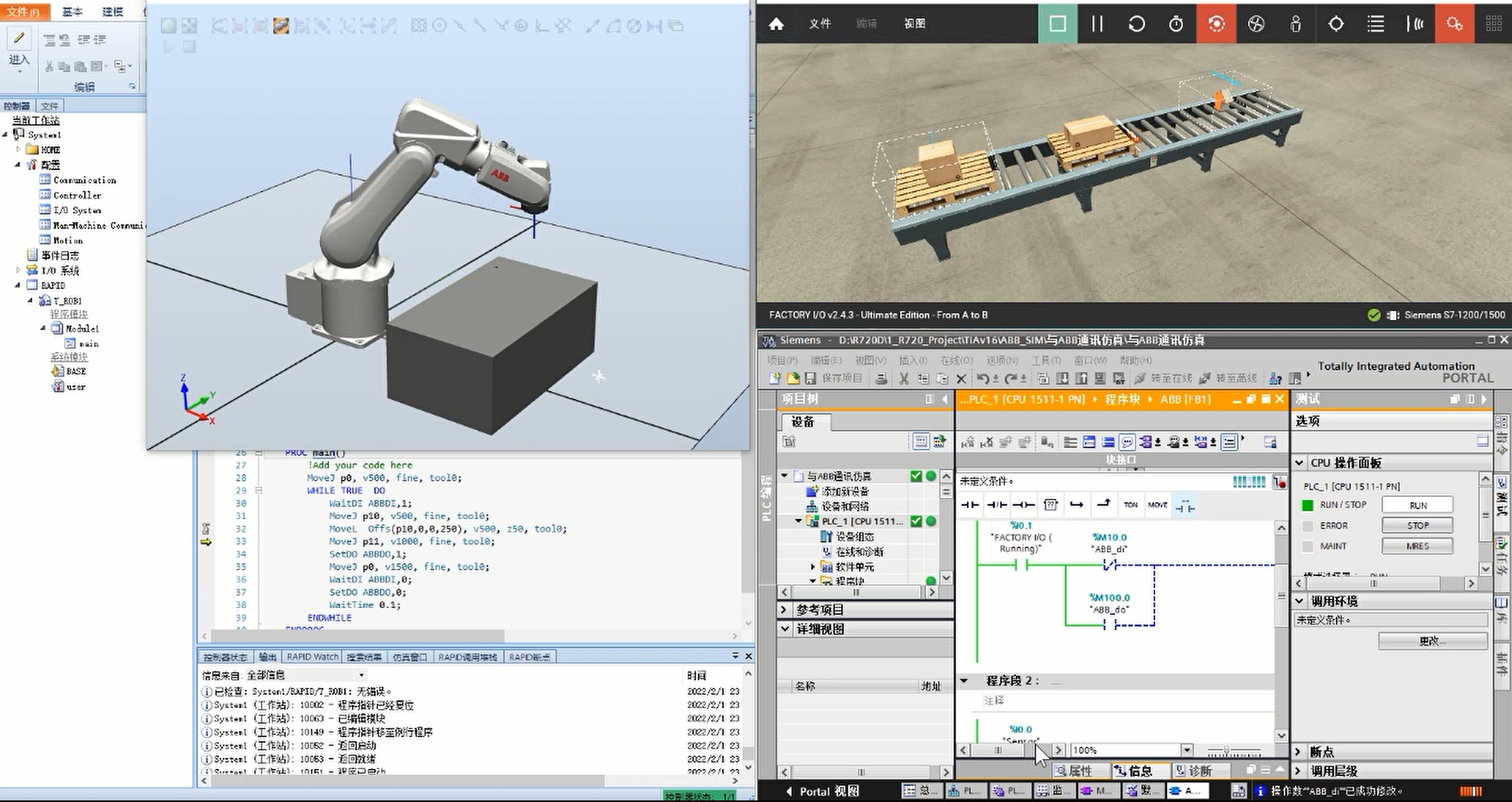
FactoryIO + ABB机器人 + 博图仿真:简单但有趣的通讯实验
FactoryIO+ABB机器人+博图仿真实验程序 通过三个不同品牌的仿真平台相互通讯,实现一些简单的动作,内容简单,主要演示通讯,起到抛砖引玉的作用,比较适合有动手能力的入门初学者。 软件环境: 1、西门子编程软件:TIA Portal V16(博图V16) 西门子仿真软件S7-PLCSIM AdvancedV3.0 2、FactoryIO 2.4 3、ABB机器人 RobotStudio 6.08 内容清单: 1、FactoryIO中文说明书+场景模型文件 2、博图V16PLC程序(源码) 3、ABB工作站(源码)。 程序实现功能: 1、FactoryIO与仿真PLC1500通讯,ABB机器人与PLC通讯 2、程序运行之后,PLC控制托盘移动到光电处,等待ABB机器人执行完抓取动作之后,继续输送下一个箱子
最近在学习工业自动化仿真时,发现FactoryIO、ABB机器人的RobotStudio以及西门子的博图软件可以结合起来玩一些小实验。虽然这些工具单独使用都很强大,但把它们串起来,就能模拟出一个完整的小系统,实现设备之间的通讯和动作配合。这次的实验算是一个“抛砖引玉”的小项目,适合刚入门的小伙伴练习。
整体思路
整个实验的目标很简单:通过FactoryIO、PLC和ABB机器人,模拟一个自动化的场景。大体流程是:
- FactoryIO负责生成或模拟一些信号(比如“托盘到达光电传感器”的信号)。
- Simatic S7-1500 PLC接收FactoryIO的信号,并控制托盘移动到某个位置。
- ABB机器人通过与PLC通讯,接收到“抓取”的指令后,执行抓取动作。
- 所有动作完成后,系统会继续输送下一个托盘,循环往复。
听起来好像挺复杂的,但其实只需要简单的逻辑和通讯配置就能实现。
环境搭建
软件清单
- 西门子TIA Portal V16(博图V16)
- Simatic S7-PLCSIM Advanced V3.0(用于仿真PLC)
- FactoryIO 2.4(用于模拟可视化界面和信号)
- ABB RobotStudio 6.08(用于机器人编程和仿真)
初步配置
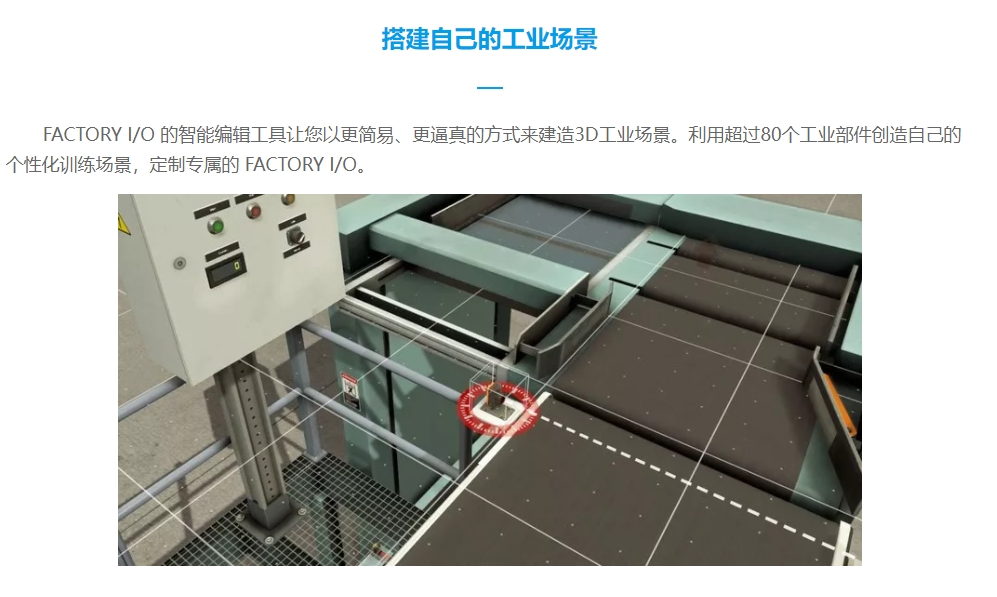
1. FactoryIO配置
FactoryIO主要用于模拟生产过程中的各种信号,比如光电传感器、按钮、指示灯等。在我们的实验中,FactoryIO会模拟一个“托盘到达”信号,让PLC知道托盘已经到位。
FactoryIO+ABB机器人+博图仿真实验程序 通过三个不同品牌的仿真平台相互通讯,实现一些简单的动作,内容简单,主要演示通讯,起到抛砖引玉的作用,比较适合有动手能力的入门初学者。 软件环境: 1、西门子编程软件:TIA Portal V16(博图V16) 西门子仿真软件S7-PLCSIM AdvancedV3.0 2、FactoryIO 2.4 3、ABB机器人 RobotStudio 6.08 内容清单: 1、FactoryIO中文说明书+场景模型文件 2、博图V16PLC程序(源码) 3、ABB工作站(源码)。 程序实现功能: 1、FactoryIO与仿真PLC1500通讯,ABB机器人与PLC通讯 2、程序运行之后,PLC控制托盘移动到光电处,等待ABB机器人执行完抓取动作之后,继续输送下一个箱子
配置步骤很简单:
- 打开FactoryIO,创建一个新的场景。
- 添加一些基本元素,比如托盘、光电传感器、按钮等。
- 设置变量(Variables)来存储信号值,比如
Sensor1表示光电传感器的状态。
2. 博图V16配置
博图V16是用来编写PLC程序的。我们需要给PLC配置一个通讯模块,让它能够与FactoryIO和ABB机器人通信。PLC的程序逻辑比较简单:
- 监听FactoryIO的信号(比如
Sensor1)。 - 如果信号触发,控制托盘移动到指定位置。
- 等待ABB机器人完成抓取动作。
- 通知FactoryIO继续输送下一个托盘。
PLC的梯形图代码大概是这样的:
LD Sensor1 // 如果光电传感器触发
AND RobotReady // 且机器人已经准备就绪
ON Conveyor // 启动输送带
...
WAIT 2000ms // 等待2秒(假设托盘到位需要2秒)
SET RobotGo // 发出“开始抓取”的信号
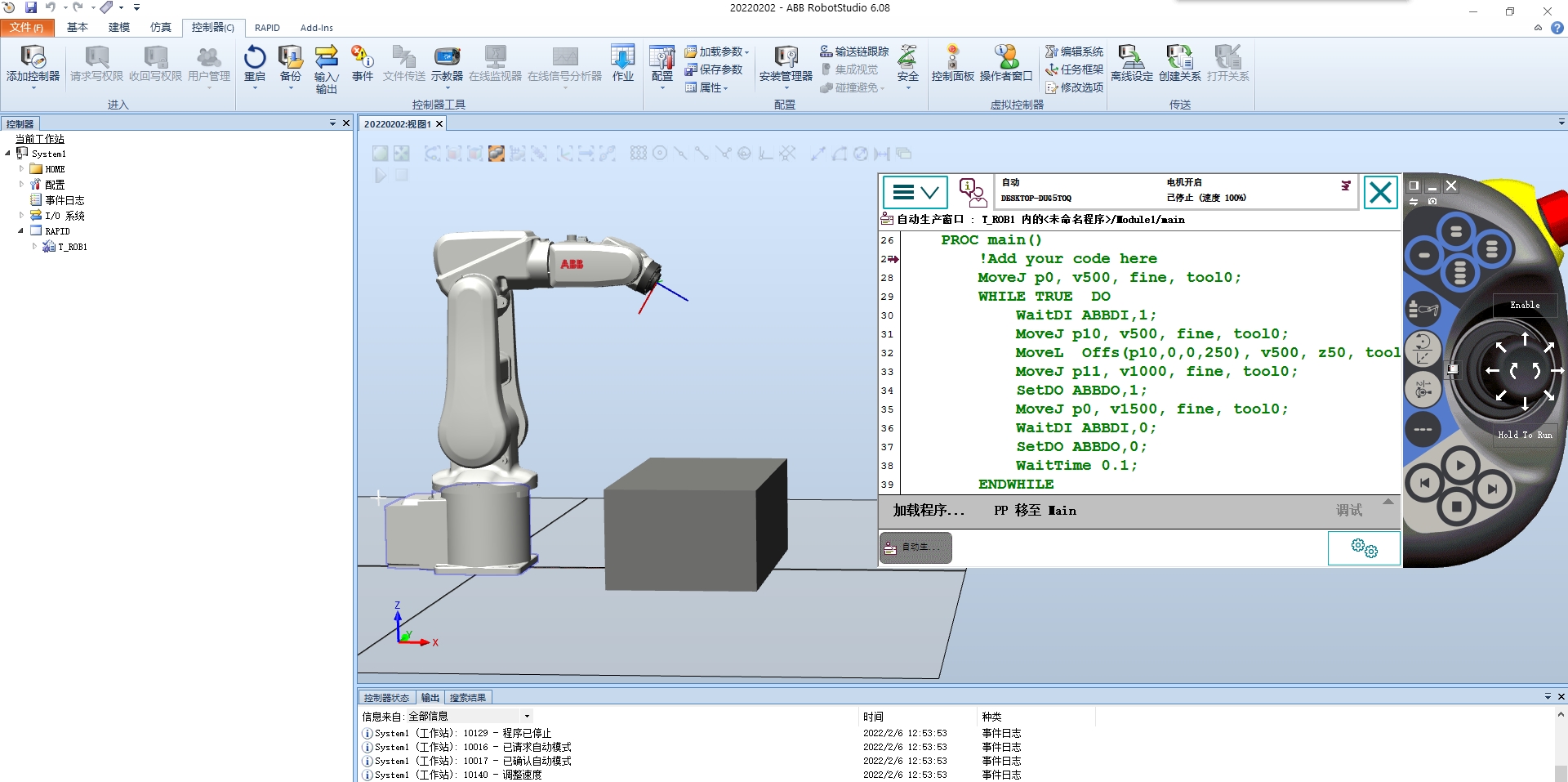
...3. ABB机器人配置
ABB机器人的程序逻辑也比较简单,主要是通过RAPID语言编写。我们需要让机器人能够接收PLC的信号,执行抓取动作后,再向PLC发送反馈信号。

RAPID代码大概是这样的:
// 等待PLC的“开始抓取”信号
WaitUtil Grip1.ToolSignal1 == 1
// 执行抓取动作
MoveL pPick, v200, z0, grip1
Grip1.ToolSignal2 = 1 // 抓取完成,向PLC反馈实验实现
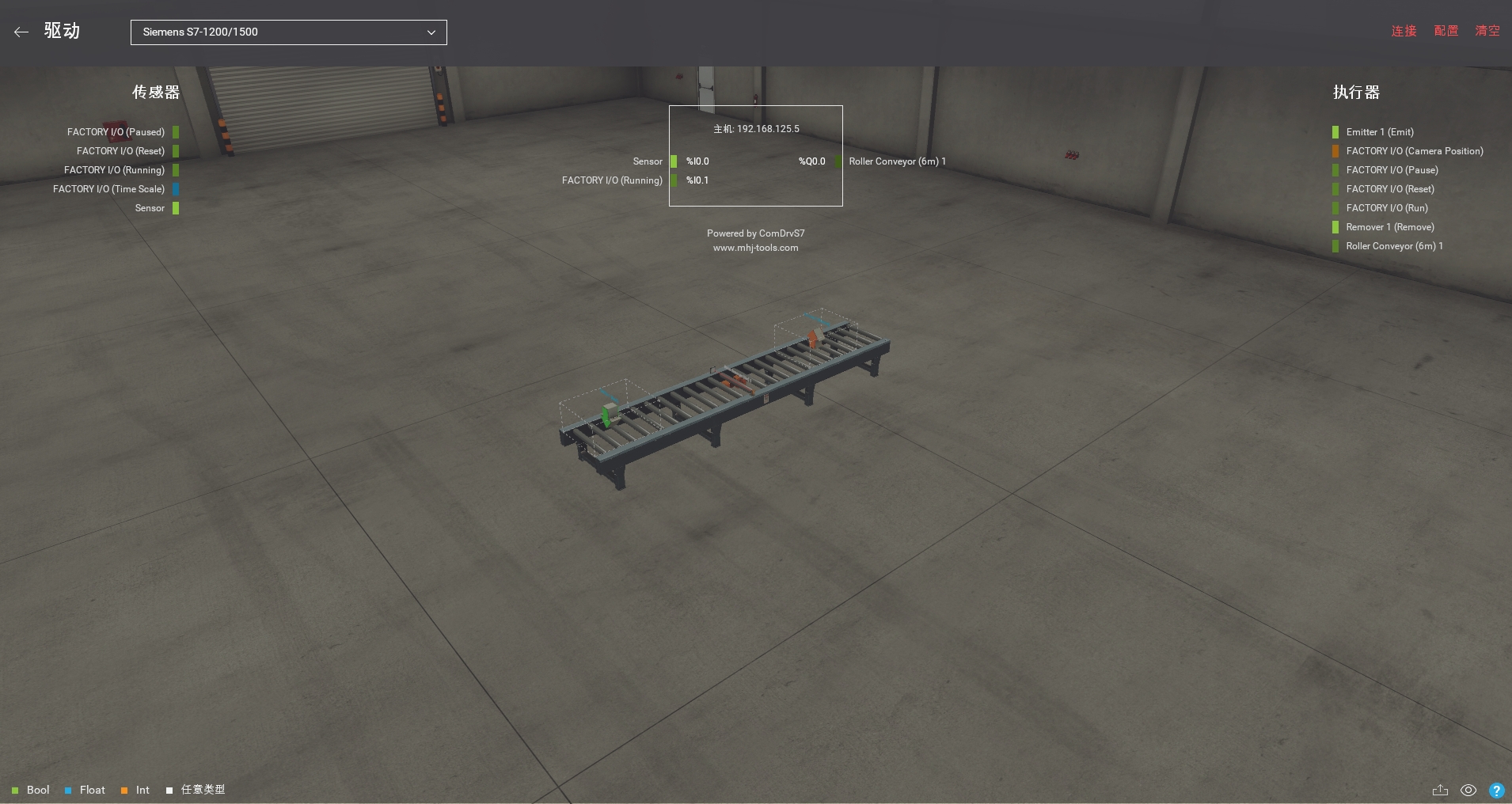
1. FactoryIO与PLC的通信
FactoryIO和PLC的通信可以通过OPC UA协议来实现。具体步骤如下:
- 在FactoryIO中,设置OPC UA服务器,将变量(比如
Sensor1)发布出去。 - 在博图V16中,配置一个OPC UA客户端,读取FactoryIO发布的变量。
- PLC程序根据读取到的信号值,触发相应的逻辑。
2. PLC与ABB机器人的通信
PLC和ABB机器人之间的通讯可以通过ABB的工业以太网协议(比如Ethernet/IP或Profinet)实现。具体来说:
- 在ABB机器人中,配置一个OPC UA客户端,连接到PLC。
- PLC和机器人通过预定义的变量(比如
RobotGo和RobotReady)进行信号交互。
3. 实时监控
在实验中,FactoryIO提供了非常直观的可视化界面,可以实时显示托盘的状态、光电传感器的信号以及机器人的动作。这对于我们调试非常有帮助。
实验总结
这个实验的核心在于不同品牌设备之间的通讯配置。虽然看起来简单,但实际操作中会遇到不少细节问题,比如:
- 通讯协议的配置:不同品牌设备之间的通讯往往需要特定的配置,可能会有一些兼容性问题。
- 信号的时序:PLC和机器人之间的信号时序必须严格配合,否则会导致动作错乱。
- 数据类型的匹配:FactoryIO、PLC和机器人之间使用的数据类型要保持一致,否则会导致通讯失败。
如果你也有兴趣尝试类似的实验,可以参考以下资源:
- FactoryIO的中文说明书和场景模型文件(文末附下载链接)
- 博图V16的PLC程序源码(梯形图和部分软逻辑代码)
- ABB工作站的配置文件和RAPID程序源码
当然,这只是冰山一角。通过类似的实验,你可以进一步探索更多复杂的场景,比如多机器人协作、复杂信号处理等等。希望这个实验能让你对工业自动化仿真有一个初步的了解,也欢迎在评论区交流你的想法和经验!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 16
16 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)